



期刊基本信息
创刊:
1972年 • 月刊
名称:
红外与激光工程
英文:
Infrared and Laser Engineering
主管单位:
中国航天科工集团有限公司
主办单位:
天津津航技术物理研究所;中国光学工程学会
主编:
吕跃广
ISSN:
1007-2276
刊号:
CN 12-1261/TN
电话:
022-58168883,58168884,58168885
邮箱:
地址:
天津市空港经济区中环西路58号
邮编:
300308
定价:
200元/期

本期栏目 2020, 49(3)
红外与激光工程 第49卷 第3期


三维成像与传感技术作为感知真实三维世界的重要信息获取手段,为重构物体真实几何形貌及后续的三维建模、检测、识别等方面提供了数据基础。近年来,计算机视觉和光电成像技术的发展以及消费电子与个人身份验证对3D传感技术日益增长的需求促进了三维成像与传感技术的蓬勃式发展。2D摄像头向3D传感器的转变也将成为继黑白到彩色、低分辨率到高分辨率、静态图像到动态影像后的“第四次影像革命”。《红外与激光工程》本期策划组织的“光学三维成像与传感”专题,共包含高水平稿件20篇,其中综述论文15篇,研究论文5篇。这些论文系统介绍了光学三维成像传感领域热点专题的研究进展与最新动态,主题全面涵盖了当前三维光学成像领域的前沿研究方向:结构光三维成像、条纹投影轮廓术、干涉测量技术、相位测量偏折术、三维立体显示技术(全息显示、集成光场显示等)、三维成像传感技术与计算成像相关交叉领域(如三维鬼成像)等。而此文作为本期专栏的引子,概括性地综述了典型的三维传感技术,并着重介绍了三维结构光传感器技术的发展现状、关键技术、典型应用;讨论了其现存问题、并展望了其未来发展方向,以求抛砖引玉。
结构光 三维成像 三维测量 三维结构光传感器 structured-light 3D imaging 3D measurement 3D structured-light sensor 


移动电子设备已成为最重要的个人交互平台,具有轻薄型态和低功耗特质的裸眼3D显示亦成为重要研究领域。裸眼3D显示能否应用于移动电子设备,也成为3D显示是否能走进千家万户,影响人类生活习惯的一个重要评判标准。文中主要介绍和比较了与移动电子设备兼容的裸眼三维(3D)显示硬件实现方法和技术,主要包括屏障视差技术、柱透镜阵列技术、时空复用技术、集成成像显示、压缩光场显示和向量光场显示技术。文中进一步分析了现有技术的瓶颈与不足,阐释技术瓶颈的主要产生原因和解决途径,并对裸眼3D显示应用于平板显示的未来发展趋势进行了展望。
裸眼三维显示 自由立体显示 多视角3D显示 光场显示 glasses-free 3D display autostereoscopic display multiview 3D display light field display 
集成成像作为一种新型裸眼三维(3D)显示技术,能够完整获取3D信息并还原再现,是目前最具发展前景的裸眼3D显示技术之一。其中,对3D信息的完整获取通过记录场景不同角度的视差信息,并以微图像阵列形式进行呈现,不仅能够为集成成像显示提供3D内容,更作为一种多维度信息获取手段,在被遮挡场景的探测成像、目标识别、2D/3D信息加密和显微3D成像等多个领域得到应用。文中对集成成像3D信息获取的基本原理、不同类型的集成成像3D信息获取技术以及集成成像3D信息实时获取技术进行综述,并讨论现存的一些问题以及未来发展趋势。
集成成像 3D信息获取 3D显示 微图像阵列 实时 integral imaging three-dimensional information acquisition three-dimensional display elemental image array real-time 
近年来,结构光三维成像技术被深入研究和广泛应用。在众多的结构光投影三维成像方法中,基于格雷码图案投影的三维成像技术因具有良好的鲁棒性和抗噪性被广泛地应用到工业检测、文物数字化及生物医学检测等领域。投影出去的格雷码图案作为一种结构光,可以直接用来调制被测面形高度分布,也可以用来辅助其他结构光的信息获取和计算,最终达到三维成像的目的。文中概述了基于格雷码图案投影的结构光三维成像技术,回顾了不同种类方法的基本原理以及研究进展,给出了课题组相关方向上的原理及应用研究结果,分析了格雷码二值图案在三维面形测量应用中的优缺点和适用范围,并指出了该领域今后的发展动向。
格雷码 结构光 三维传感 条纹投影 动态三维测量 Gray code structured light three-dimensional sensing fringe projection dynamic 3D measurement 
对条纹投影动态三维表面成像技术进行了总结,分析了典型方案的特点。首先介绍了该技术的基本原理,包括系统基本结构、三维表面成像原理及相移法和傅立叶变换法这两种典型的相位提取方法。接着介绍了动态成像方案,包括高速投影方案和采用速度相对低的相机进行动态三维表面成像的方案。然后介绍了动态三维成像中绝对相位获取方法,主要是模拟和数字编码法及区域统计特性编码法。最后介绍了高精度动态相位测量方案。
光学三维成像 相位测量轮廓术 傅立叶变换轮廓术 条纹分析 绝对相位 optical three-dimensional imaging phase measurement profilometry Fourier transform profilometry fringe analysis absolute phase 
陶瓷、古文物以及金属工件等高反光物体表面的三维形貌测量在各个领域有大量的需求和应用。由于表面反射率变化范围较大以及相机灰度范围有限等问题,传统的条纹投影方法不能正确地测量高反光表面的三维形貌。综述了高反光表面三维形貌测量技术的国内外研究现状、应用领域和未来发展方向。首先,根据所采用原理和测量方法的不同,将现有的高动态范围三维形貌测量技术分为下述六类进行详细的介绍:多重曝光法、投影图案强度法、偏振滤光片法、颜色不变量法、光度立体技术以及其他技术。然后,详细的比较了各种技术的优缺点并归纳其适应性分析。最后,总结了高反光表面三维形貌测量技术的应用领域并展望了该技术的未来研究方向。基于文中综述的内容,使用者可根据不同的应用需求和测量条件选择相应的最佳三维测量方法,进而更精确的重建高反光表面的三维形貌。
三维形貌测量 高动态范围 条纹投影 高反光表面 相位计算 3D shape measurement high dynamic range fringe projection shiny surface phase calculation 
针对大尺寸复杂物体的全自动、高精度、大数据密度、真彩色三维成像与测量,基于条纹结构光三维传感器,阐述了多节点三维传感器测量网络相关技术。涉及单三维传感器的条纹分析和相位重建、系统标定和三维重建两大关键技术点分析,多节点三维传感器测量网络的构建与优化、多节点三维传感器测量网络的标定、测量三维深度数据与纹理数据的匹配与融合等相关技术。并给出了部分实验原型机及实验结果。
条纹结构光 三维传感器 测量网 系统标定 立体标靶 三维成像与测量 fringe structured illumination 3D sensor measurement network system calibration stereo calibration target 3D (three-dimensional) imaging and measurement 
条纹投影轮廓术能较好地兼顾系统灵活性与测量精度,是光学三维表面成像与测量的主流技术。利用条纹投影轮廓术进行三维成像,首先需要建立合适的系统模型,然后通过系统标定来确定描述模型的系统参数,最后利用标定的系统模型进行三维重建,获得物体的三维表面形貌。由此可见,系统标定与系统模型密不可分,对三维成像的性能有直接影响。根据相位-三维映射和双目立体视觉两类不同的工作原理,对条纹投影轮廓术的系统模型和系统标定方法进行了综述,并简要总结了评估系统精度的方法和依据。
条纹投影轮廓术 系统标定 系统模型 双目立体视觉 标靶 精度评估 三维成像 fringe projection profilometry system calibration system model binocular stereo vision calibration target accuracy evaluation 3D (three-dimensional) imaging 
在条纹投射技术中,投影机光强非线性是影响测量精度的关键因素之一。投影机非线性会在条纹信号中引入高阶谐波,从而导致位相测量结果中出现波纹状误差。投影机非线性的自适应校正方法,也即自校正方法,可以从测量数据中直接估计投影机输入输出光强曲线或位相误差函数,从而避免了繁琐的前标定过程,并因此在应用中具备很强的适应性。文中拟对投影机非线性自校正算法的研究进展作一个系统性的概述。这些方法中,其一,是从采集的条纹图像中利用迭代拟合算法直接估计投影机的非线性曲线,并依据其校正位相误差;其二,是从单幅测量位相图中识别并移除由非线性引起的位相误差;其三,是利用两幅不同频率的测量位相图估计误差系数,并补偿其影响。实际测量结果表明:上述自校正方法,在无需标定数据条件下,可以有效地解决投影机非线性误差问题,有助于提高条纹投射技术的测量精度。
投影机非线性 条纹投射 位相测量 projector nonlinearity fringe projection phase measurement 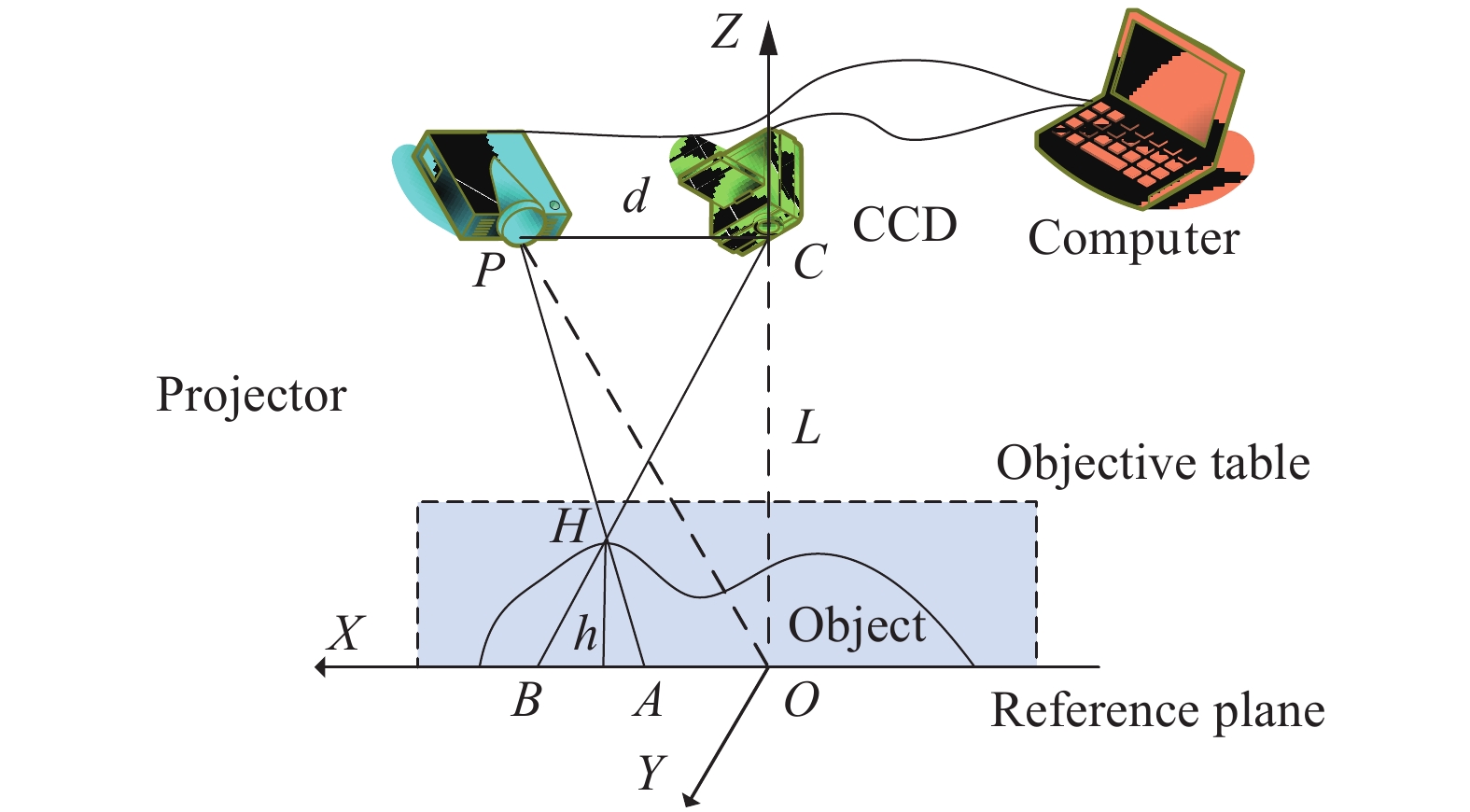
结构光作为一种非接触式主动三维测量方法得到了快速发展。基于结构光原理的相位编码方法将码字以相位的形式嵌入到条纹的强度中,由于使用相位而不是强度来确定码字,对表面对比度、环境光和相机噪声不敏感,具有较强的鲁棒性。文中回顾了基于相位编码的三维测量技术研究进展,综述了基于相位编码的三维测量原理,包括初始相位的设计方法、编码条纹的产生方法、相位计算方法、条纹级次的获取与校正以及最终绝对相位的获取,给出了相关的实验结果,并指出了相位编码方法中的优缺点。最后,讨论了该技术面临的挑战,并指出了该领域今后的发展方向。
三维测量 结构光 相位编码 条纹级次 3D measurement structured light phase encoding fringe order 
相移法可实现静态物体三维形貌的高精度重构,对于运动物体形貌重构则误差较大。其根本原因为相移法需要多个条纹图进行物体重构,而传统相移法理论没有包含物体的运动信息,无法描述物体运动对相位的影响。导致当物体在条纹图间发生运动时测量误差较大。针对以上问题,提出了一种利用物体运动信息对多个二维运动物体进行三维重构的新方法。不同的被测物体可具有不同的运动轨迹。首先,对多个被测物体进行识别并确定目标区域;然后,采用KCF算法对物体进行跟踪并使用SIFT算法提取物体运动前后的特征点,分别估计描述物体运动的旋转平移矩阵。将运动信息带入条纹描述方程中,获得包含运动信息的三维重构模型,最终采用最小二乘法提取正确的相位值。结果证明:该方法能有效地减少由物体运动引起的测量误差,扩展了三维测量的应用范围,具有较高的工业应用价值。
相移法 三维重构 相位测量 条纹分析 phase shifting profilometry 3D reconstruction phase measurement fringe analysis 
随着同步辐射光源和自由电子激光器相关技术的发展和光束质量的提升,对用于转递和聚焦光束能量的X光反射镜的指标要求也逐渐提高。为避免引入额外的波前误差,反射镜面形高度误差均方根值的要求已逼近至亚纳米量级。如此苛刻的面形要求对X光反射镜的测量工作带来了极大的困难和挑战。除了在各国同步辐射光源得到广泛使用的长程轮廓仪等基于角度测量的轮廓扫描仪器之外,基于激光干涉仪的拼接干涉技术也发展为测量同步辐射镜的一种有效手段。文中主要介绍了近期笔者等为测量X光反射镜而开发的拼接干涉平台。利用这一测量平台,研究了在不同的拼接参数下的多种拼接模式。着重讲述了其中纯软件拼接模式的基本原理和实际测量。用实测结果与不同测量仪器和不同研究机构的结果进行比对,验证了拼接干涉测量用于检测同步辐射镜的有效性,并展示了此拼接平台的测量表现。根据所得的测量数据看来,使用纯软件拼接模式来测量X光平面反射镜时,测量重复性的均方差值可以达到0.1 nm左右;而测量X光双曲柱面镜时(曲率半径的变化范围为50~130 m),测量重复性的均方差值为0.2~0.3 nm。此结果基本满足平面和接近平面(曲率半径大于50 m)的同步辐射镜常规检测和为确定性加工提供面形反馈的需要。
高精度光学测量 X光反射镜测量 同步辐射镜检测 拼接干涉术 high-precision optical metrology X-ray mirror metrology synchrotron mirror inspection stitching interferometry 
条纹图处理是光学测量技术中一个非常重要的步骤。从早期的经典傅里叶变换,到随后引入局部分析能力的窗口傅里叶变换、小波变换、S变换,再到近些年变分模型分解、经验模态分解(EMD)等,条纹图处理技术经历了长足的研究和发展历程。在这些优秀的技术中,EMD算法由于具有较强的自适应性和复杂信号处理能力而在近些年受到一定的关注。文中结合条纹图处理的关键内容和发展历程,重点分析和总结了EMD算法及其应用于条纹图处理的关键问题和研究进展,指出了该技术尚存的技术难点和主要问题,为相关技术的发展提供了理论和实践的参考。
EMD算法 条纹图处理 光学测量 empirical mode decomposition fringe pattern analysis optical measurement 
利用波长移相干涉技术对平行平板的前后表面同时进行非接触测量在光学检测领域具有重要意义。阐述一种可实现平行平板前后表面干涉混叠信号解相的时域加权算法:加权36步采样算法。首先基于算法原理与约束条件进行了加权多步采样算法的基础分布参数的设计,进而得到前表面、后表面、厚度变化干涉信号的采样权值。利用该权值进行加权操作即可得到各表面初始相位分布。选用泽尼克多项式进行了多表面干涉解相的仿真,模拟的分离结果与真值的最大误差不超过0.06 nm。此外还分析了多种误差对测量结果的影响。论文对这一厚度为20 mm的平行平板开展了测量,验证了该算法在实际测量过程中的有效性。
波长移相 加权多步采样算法 多表面信息分离 窗函数设计 wavelength phase-shifting weighted multi-step sampling algorithm information separation of multi-surface design of window function 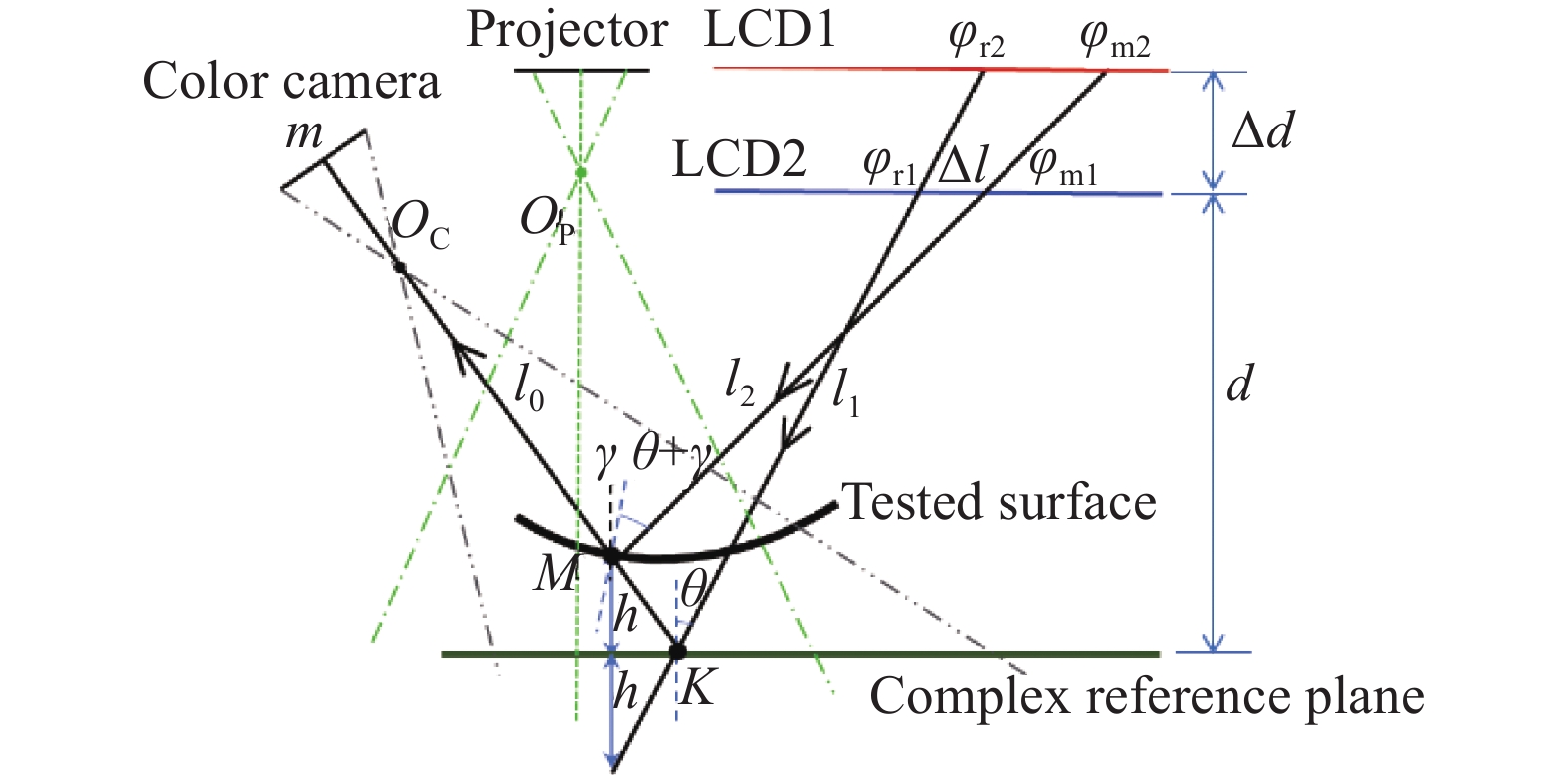
光学三维测量技术以其非接触、无损及快速测量的优势被广泛应用于不同领域。已有的条纹投影和条纹反射测量术分别适用于漫反射表面和镜面表面。然而,航空航天和先进制造中存在许多漫反射和镜面反射表面同时存在的复合反射表面。提出一种基于结构光投影和反射的方法来实现复合表面形貌的快速测量。首先,投影仪投射蓝色正弦条纹图于被测物体表面,同时显示屏显示的红色条纹被镜面部分反射。其次,彩色相机采集经被测表面调制的变形条纹图。然后,从相机不同颜色通道中提取对应不同类型反射表面的变形条纹,并计算变形条纹图的绝对相位。最后,通过系统标定建立相位信息与深度之间的直接关系,得到被测复合表面的三维形貌。实验结果表明:该方法不仅能够有效地实现非连续复合表面物体的测量,还能够同时测量独立的漫反射和镜面反射表面的三维形貌。
复合表面 结构光三维成像 系统标定 相位计算 complex surface structured light 3D imaging system calibration phase calculation 
与传统的面阵成像技术不同,单像素成像技术作为一种新型的计算成像技术,使用不具备空间分辨能力的桶探测器,结合空间光场调制技术,通过关联算法重构待成像物体的空间强度信息,在研究界得到了广泛的关注。近年来,单像素成像技术被广泛应用于各种波段的成像领域,尤其是在某些面阵探测器价格昂贵甚至无法制备的特殊波段,单像素成像技术逐步发展为一项低成本高成像质量的替代技术。并且,在三维成像技术中,大量基于单像素成像的相关研究工作也被相继提出。文中主要介绍了单像素成像技术的基本原理及应用发展历程,并着重介绍了其在条纹结构投影三维成像技术中的应用工作。
单像素成像 计算成像 三维成像 近红外成像 single-pixel imaging computational imaging three-dimensional imaging near infrared imaging 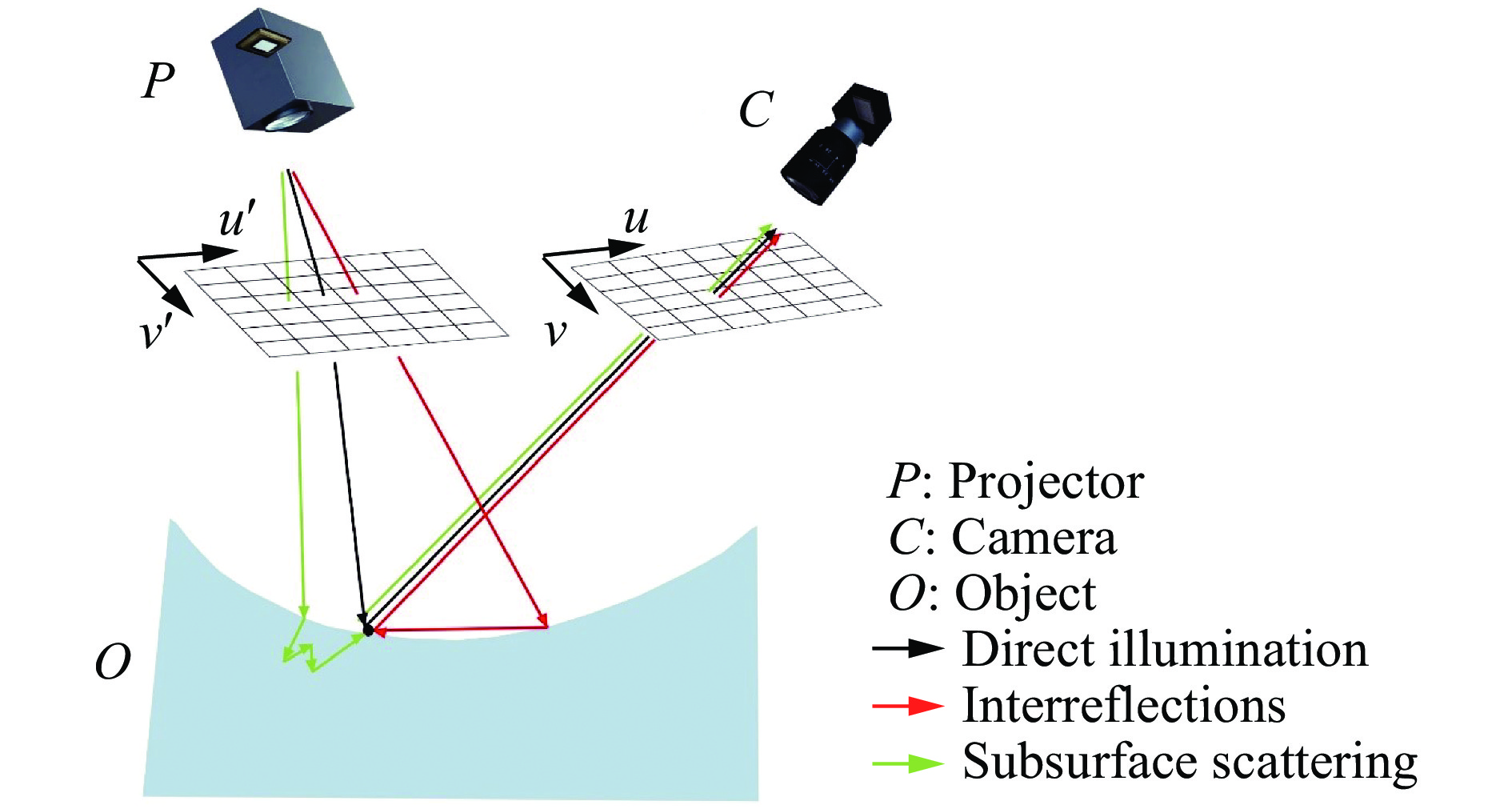
在条纹投影等传统结构光三维测量技术中,在全局光照的干扰下,无法获得高质量、高精度的三维测量结果。典型的全局光照效应包括互反射和次表面散射。互反射发生在凹陷的光亮反射表面,而次表面散射发生在半透明材料表面。单像素成像(Single-pixel imaging, SI)技术可以通过没有空间分辨率的探测器捕获场景,然而,大多数现代数码相机采用传统像素化的图像传感器。在这里,我们提出了将单像素成像技术扩展到像素化的图像传感器中,将图像传感器上的每个像素都被视为是一个独立的单像素成像单元,可以同时获取图像。实验表明,这种单像素成像方法可以完全分解直接光照和全局光照,实现在全局光照干扰下的高质量、高精度三维重建。
单像素成像 互反射 次表面散射 三维测量 single-pixel imaging interreflections subsurface scattering 3D measurement 
条纹投影(结构光)三维成像是一种广泛使用的三维成像手段。近年来,集成式的三维传感器发展迅速,特别是基于结构光原理的三维传感器件已逐渐成为高端智能手机必不可少的一个重要传感单元。然而随着应用需求的不断增多,人们对条纹投影三维成像这项技术的效率、精度、稳定性等方面的要求也越来越高。同时近年来,深度学习技术的飞速发展已经为光学成像技术的发展开启了一扇新的大门,并且从这扇大门中人们注意到伴随着人工智能概念的引入,条纹投影技术的发展也正在经历着新的突破。首先简要介绍了条纹投影三维成像的基本理论。随后举例分析通过运用深度学习技术,起初基于物理模型的条纹投影技术也可成为一种在“数据”驱动下实现的技术,而且在这种情况下,它展现出了超越传统算法的潜力。最后从神经网络模型、训练数据、训练方法等方面,讨论该领域面临的挑战与未来的研究方向。
条纹投影 三维成像 深度学习 相位恢复 fringe projection 3D imaging deep learning phase retrieval 
由于四维光场数据中记录了场景中所有光线的方向和强度,通过对其分析和计算即可获得空间场景中对应点的3D坐标。但是目前对光场数据进行处理所采用的重聚焦和多目视觉方法,由于空间场景中特征较少,导致很难确定光场数据中的对应关系光线,因此,重建获得的3D数据不仅稀疏而且精度较低。针对此,提出了一种使用结构光投影技术对三维场景进行标记,并根据相位标记精确的建立起光线之间的对应信息,最终快速地计算出空间场景3D数据的方法。由于4D光场矩阵中存储的是光线相位而不是传统方法中的强度,并且还记录有不同方向的光线信息,因此,该方法不仅提高了传统光场三维重建的精度,还可以解决以往结构光投影三维测量方法中存在的遮挡和高光反射问题。最后通过实验验证了所提方法的可行性和准确性。
光场成像 四维光场 三维重建 结构光投影 light field imaging four-dimensional light field three-dimensional reconstruction structured light projection 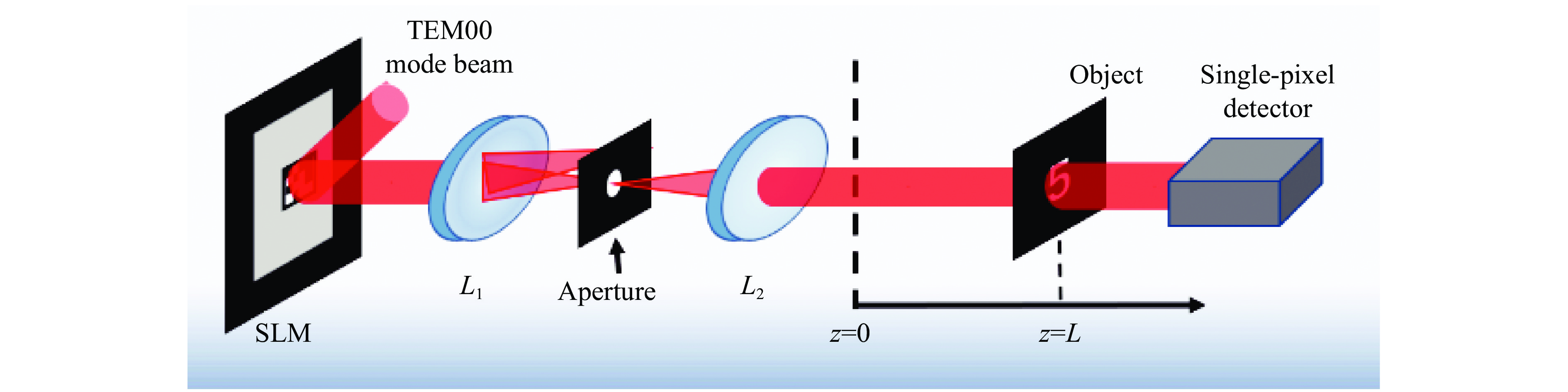
在计算鬼成像(Computational ghost imaging,CGI)系统中,可以通过估计重构图像的模糊程度获取目标的轴向深度。但该方法易受到背景噪声干扰,且要求像质评价函数有较长的工作距离,导致所需的采样次数较高,限制其实用性。针对这一问题,提出了一种基于自适应对焦窗口的目标深度估计方法。首先根据评价函数的整体特征划分搜索区间,然后在给定区域内对目标实际轴向深度进行迭代搜索。在迭代过程中,通过设计自适应窗口,有效减少背景区域的同时,也保证了窗口内目标的完整性。实验结果表明:该方法大幅降低了评价函数所需的必要工作距离,使其在欠采样条件下同样适用,也减小了背景噪声对评价函数的影响,增强了算法的鲁棒性,进一步完善了基于计算鬼成像系统的深度估计方法。
鬼成像 目标深度估计 自适应对焦窗口 深菲涅尔区 工作距离 ghost imaging object depth estimation adaptive focus window deep Fresnel region working distance 
高功率全固态亚纳秒激光器具有体积小、成本低、线宽窄、峰值功率高等优势,在诸多领域具有重要的应用价值。为获得高功率亚纳秒激光输出,首先通过被动调Q激光器得到亚纳秒种子激光,然后利用LD侧泵模块,采用双模块双通放大的实验设计,在重复频率为1 kHz时,获得了平均功率达10 W,脉冲宽度816 ps,线宽39 pm,光束质量M2小于1.8的激光输出,放大器整体放大倍率达95倍以上。
放大器 亚纳秒 窄线宽 侧面泵浦 amplifier sub-nanosecond narrow linewidth side pump 
为探究毫秒脉冲激光辐照单晶硅的热损伤规律和机理,利用高精度点温仪和光谱反演系统对毫秒脉冲激光辐照单晶硅的温度进行测量。分析温度演化过程,研究毫秒脉冲激光对单晶硅热损伤全过程的温度状态和对应的损伤结构形态。研究表明:脉冲宽度固定时,激光诱导的单晶硅的峰值温度随能量密度的增加而增加;当脉冲宽度在1.5~3.0 ms之间时,温度随脉冲宽度的增加而降减小。温度上升曲线在熔点(1 687 K)附近时出现拐点,反射系数由0.33增加为0.72。在气化和凝固阶段,出现气化和固化平台期。单晶硅热致解理损伤先于热致熔蚀损伤,在低能量密度激光作用条件下,应力损伤占主导地位,而在大能量密度条件下,热损伤效应占主导地位。损伤深度与能量密度成正比,随脉冲个数增加迅速增加。
长脉冲 激光 单晶硅 热损伤 应力 熔蚀 long pulse laser monocrystalline silicon thermal damage stress ablation 
粒子喷溅是熔石英后表面激光损伤过程的重要现象,其实验观测及动力学参数获取一直存在困难。为实现后表面损伤粒子喷溅动力学特征获取,搭建了时间分辨双帧阴影成像系统,并开发了基于分层Voronoi图和弹性势能模型的粒子识别与匹配算法。结合图像配准和去噪步骤,该方法能够克服双帧阴影成像技术固有的背景噪声严重和原点失配的缺点,在6 μs及之后的延迟图像中能实现100%正确检测与匹配。与人工处理对比,该方法能以像素精度同时获取粒子的尺寸、速度大小及飞行方向,且数据处理时间缩短了约20倍。
熔石英 后表面损伤 粒子喷溅 动力学特征 自动获取 fused silicon exit surface damage particle ejection dynamics characteristics automatic acquisition 
一台基于分子双边缘鉴频技术的车载瑞利多普勒激光雷达系统,于2014年至2016年先后在山西忻州(38.42°N 112.72°E)和甘肃酒泉(39.74°N 98.49°E)地区对平流层风场进行连续观测。观测结果表明:18~25 km范围内,酒泉春、秋季节以及忻州冬季均出现了准零风层大气结构,并伴有明显的上下浮动现象,该准零风层结构与2011年夏季新疆乌鲁木齐(42.1°N 87.1°E)多普勒激光雷达系统观测到的结果具有明显差异。分析认为:由于5月与10月处于短暂的季节过渡时期,中纬度地区平流层东风环流尚未稳定导致零风线的上下浮动;2015年1月忻州地区出现平流层准零风层与平流层爆发性增温有关。
多普勒激光雷达 直接探测 平流层 准零风层 Doppler lidar direct detection stratosphere quasi-zero wind layer 
研究“三分光束”光内同轴送丝激光熔覆各工艺参数的工艺区间及参数与熔覆层几何形貌映射关系。首先,采用单因素实验方法研究激光功率、扫描速度、送丝速度、离焦量四个工艺参数的工艺区间;其次,以熔覆层的高度、宽度、横截面积作为熔覆层几何形貌的量化指标;最后,分别建立神经网络模型和二次回归模型实现熔覆工艺参数和熔覆层形貌量化指标之间映射关系的预测。基于单道单因素实验,当激光功率介于1 300~1 700 W,扫描速度介于3~7 mm/s,送丝速度介于9~15 mm/s,离焦量介于?2.5~?1.5 mm时能获得液桥过渡熔覆质量较好的单道。在对测试样本数据的预测中,在置信度85%情况下,BP神经网络模型对熔覆层高度、宽度、横截面积的预测精度分别为100%, 100%, 93.33%,均方根误差分别为0.21, 0.07, 0.24;二次回归模型的精度分别为100%, 66.67%, 73.33%,均方根误差分别为0.21, 0.13, 0.28。结论说明二次回归模型中变量的交叉项未能拟合送丝熔覆多变量耦合的非线性过程,而BP神经网络得到较好的预测结果。
激光熔覆 三分光束 光内同轴送丝 二次回归 BP神经网络 laser cladding three bean coaxial wire feeding quadratic regression BP neural network 
弱场偏振探测技术是分子取向探测技术的一种。该探测技术不会破坏无外场取向分子的量子状态从而便于取向后的分子进行各种实际应用,因此这种技术在分子取向的研究中运用较为广泛。详细介绍了弱场偏振探测技术和其改进技术——平衡弱场偏振探测技术的探测原理和实验系统组成,以泰勒级数为基础采用近似方法分析、比较了两种探测技术的灵敏度,探讨了二者的噪声来源和影响。研究发现,在分子取向度较小时,后者的灵敏度比前者较强;探测激光能量涨落较大时,后者的噪声明显低于前者;探测激光能量涨落可以忽略时,二者的噪声大小比较接近。
分子取向 弱场偏振探测 灵敏度 噪声 molecular alignment weak field polarization sensitivity noise 
基于盖革APD阵列的激光主动探测系统具有较高的灵敏度、空间分辨率和测距精度,在遥感探测、目标识别等领域具有广泛的应用前景。受探测模式、噪声等因素影响,盖革APD阵列需要大量累积光子探测来实现高精度成像。针对该问题,基于目前国内规模最大的InGaAs盖革APD阵列,搭建了1 064 nm激光探测实验装置,对室外600 m外目标进行了成像。通过分析光子计数物理过程,建立了目标反射率与距离的极大似然估计。结合自然图像稀疏的先验知识,采用正则化图像重构方法,改善了累积光子数较少情况下的成像精度。通过对比,验证了正则化图像重构方法能够抑制光子数涨落引起的参数估计偏差,提升了成像质量。
激光三维成像 盖革APD阵列 极大似然估计 正则化方法 3D laser imaging GM-APD array maximum likelihood estimation regularized method 
多通道焦面遥感相机通道间的配准是相机**定焦过程中的关键技术,通道间的配准精度决定了后续通道融合后的遥感图像质量。设计并完成了一套用于解决九谱段双通道焦面配准的测试仪。积分球照明一条狭缝,经平行光管成像在无穷远,照明九谱段相机,在相机焦面上得到一个竖直放大的狭缝像。四谱段、五谱段线阵探测器分别位于双通道焦平面上,分别调整双通道焦面的位置,计算四谱段、五谱段探测器上狭缝像的质心位置,通过质心位置来评价通道间像元的对准精度。该仪器解决了多通道焦面遥感相机通道间的配准问题,配准精度达亚像元量级,保证了通道融合后的图像质量。
遥感相机 多通道焦面 配准精度 多谱带 remote sensing camera multi-channel focal plane registration accuracy multispectral 
基于外视场拼接原理,研制一套大视场中波红外原理样机。设计一制冷型中波红外光学系统。采用光学系统出瞳与冷屏重合的二次成像结构形式,保证系统具有100%冷光阑效率。工作波段为3.7~4.8 μm,焦距为40 mm,相对孔径为1:2,全视场角为21.74°×17.46°(27.88°),系统总长145 mm。采用孔/反射镜分时成像的外视场拼接,实现2×1视场扩展。设计结果表明:在空间频率21 lp/mm处,轴外视场MTF>0.68,接近衍射极限。系统结构紧凑,成像质量较高。利用原理样机完成可行性和合理性验证。
分时曝光 外视场拼接 视场扩展 time-sharing exposure external field splicing field of view expansion 
激光车灯对比于LED车灯,具有能耗小、体积小、亮度高等优点,是汽车车灯发展的新方向。提出了一种激光车灯的完整的设计思路。光源采用激光二极管激发荧光片得到白光。通过搭建光学检测平台研究激光驱动白光光源的光学特性,通过机器视觉的方法研究荧光片前后光斑的形状和尺寸的变化,从而精确地建立光源的仿真模型,为后续的光学设计提供理论依据。通过非成像光学设计方法,设计了Fresnel透镜实现了对激光的整形,并利用超精密车削实现透镜的加工。完成了车灯的设计和组装,并通过光学仿真和光学实验验证了设计的正确性。
非成像光学 Fresnel透镜 几何构造法 激光驱动白光光源 nonimaging optics Fresnel lens geometric construction method laser-driven white source