1 西北大学光子与光子技术研究所,陕西 西安 710127
2 浙江大学光电科学与工程学院,浙江 杭州 310007
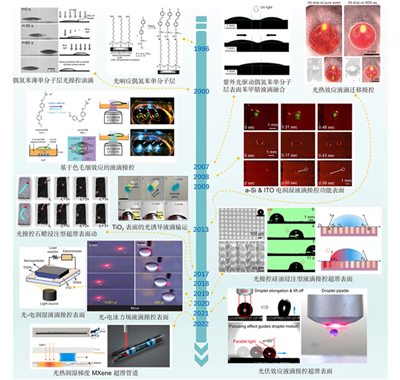
Such as, by using the photothermal effect of materials, the surface tension of the lubrication layer on the surface of materials can be changed, thus creating a wetting gradient force to push the droplets to move. Further, the sliding and pinning of the droplet can be controlled by the phase change of the paraffin layer on some functional surfaces. The pyroelectric crystal can generate the dielectric force field on its surface based on the photothermal effect, which could be applied to realize the lossless moving, merging, and splitting of the droplets. In addition, the wettability of the photovoltaic crystals could be changed with the irradiation of light, therefore, can be used to control the behavior of droplets. In this paper, the development of the photo-responsive functional surface in droplet manipulation was briefly reviewed. The mechanisms of the droplet manipulation with the functional surface were expatiated. The categories of functional surfaces were summarized, the characteristics of the structure were analyzed, and the corresponding implementation method was introduced in detail. In addition, the applications of the photo-responsive functional surface in droplet transportation, fusion, and segmentation were introduced. Finally, the future development and potential applications of the photo-responsive functional surface for droplet manipulation were prospected.
光响应 功能表面 液滴操控 润湿性 photo-responsive functional surface droplet manipulation wettability
1 北京航空航天大学 仪器科学与光电工程学院, 北京 100191
2 北京航空航天大学 宁波创新研究院, 浙江 宁波, 315000
为了解决定子分段式永磁直线同步电机(PMLSM)存在的因磁阻效应、负载阻力、摩擦力、参数摄动以及动子进出定子时耦合面积变化所造成的控制性能下降的难题, 根据动子和定子的耦合状态, 提出一种在完全耦合阶段和动子退出定子阶段的分段式控制方法。首先, 在动子与定子完全耦合阶段采用改进滑模控制器减小推力波动导致的速度波动, 再通过加入扰动观测器降低滑模切换项所带来的抖振现象; 在动子退出定子阶段, 建立相关电磁参数与动子位置的函数关系, 实时补偿由耦合面积变化引起的动子失速, 使动子速度在退出时接近给定值。仿真及实验结果表明: 动定子完全耦合过程中的速度稳态误差为0.005 m/s, 收敛时间为0.3 s, 动子退出定子阶段的速度波动不超过0.04 m/s, 满足定子分段式PMLSM用于长行程自动运输系统对平稳性及快速性的需求。
永磁直线同步电机 速度波动 改进滑模控制 实时补偿 Permanent Magnet Linear Synchronous Motor(PMLSM) speed ripple improved Sliding Mode Control(SMC) real time compensation
北京航空航天大学 仪器科学与光电工程学院, 北京 100191
为了解决长行程定子不连续永磁直线同步电机存在的因无法全程安装位置传感器和不同动子和定子之间的电磁参数不固定所造成的控制性能下降的难题, 提出一种在每一段定子内先进行参数标定, 再进行速度控制的控制系统设计。首先, 在动子进入过程中, 对电机进行电磁参数标定, 根据标定参数对控制器参数进行调整, 以达到更好的控制效果。然后, 使用无位置传感器控制系统使动子快速达到设定速度值并稳定运行。实验结果表明: 动子进入过程参数标定精度分别为0.002 Wb和0.000 4 H; 无位置传感器控制中位置估计精度为0.63 mm, 速度收敛时间为0.45 s, 稳态误差为0.02 m/s。基本满足永磁直线同步电机用于长行程运输的控制快速性、稳定性等要求。
永磁直线同步电机 长行程运输系统 参数标定 无位置传感器控制 Permanent Magnet Linear Synchronous Motor(PMLSM) long-distance transportation system parameter calibration sensorless control
北京航空天大学 惯性技术重点实验室, 北京 100191
提出一种基于角速率前馈与力矩观测相结合的磁轴承负载力矩复合补偿控制方法来提高双框架磁悬浮控制力矩陀螺磁悬浮转子的悬浮精度。建立了双框架磁悬浮控制力矩陀螺磁悬浮转子动力学模型, 分析了内外框架转动情况下的磁轴承负载力矩。分别基于框架角速率前馈和力矩观测设计了磁轴承负载力矩复合补偿控制方法, 分析了补偿后系统的稳定性。最后, 利用实验室研制的样机搭建试验平台对本文所提出的方法进行了实验验证。结果表明: 在框架以角加速度120(°)/s2启动至10(°)/s时, 该方法使转子Ax端位移跳动量减小为未补偿前的44.8%; 内外框架以幅值 频率10 Hz正弦激励时, 转子Ax、By端的位移跳动量分别减小为未补偿前的23.4%和35.5%。结果显示提出的方法有效地提高了磁悬浮转子在负载力矩扰动下的悬浮精度。
双框架磁悬浮控制力矩陀螺 磁轴承 负载力矩 角速率前馈 力矩观测 复合补偿 Double-gimbal Magnetically Suspended Control Momen magnetic bearing load torque angular velocity feedforward torque observer composite compensation









