捷联惯导系统单位置初始对准可观测性分析  下载: 715次
下载: 715次
Observability Analysis of Fixed Position Initial Alignment of Strapdown Inertial Navigation System
国防科技大学光电科学与工程学院, 湖南 长沙 410073
图 & 表
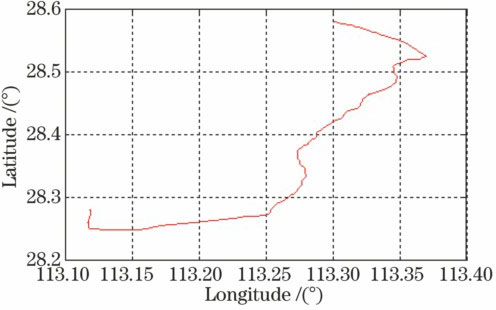
图 1. 惯导系统A运行轨迹
Fig. 1. Trajectory of SINS A
下载图片 查看原文
图 2. A系统10阶模型纯惯性位置误差随P3的变化
Fig. 2. Position error of ten-order model of SINS A as a function of P3
下载图片 查看原文
图 3. A系统7阶模型纯惯性位置误差随P3的变化
Fig. 3. Position error of seven-order model of SINS A as a function of P3
下载图片 查看原文
图 4. A系统10阶模型纯惯性位置误差随Q的变化
Fig. 4. Position error of ten-order model of SINS A as a function of Q
下载图片 查看原文
图 5. A系统7阶模型纯惯性位置误差随Q的变化
Fig. 5. Position error of seven-order model of SINS A as a function of Q
下载图片 查看原文
图 6. A系统10阶模型纯惯性位置误差随R的变化
Fig. 6. Position error of ten-order model of SINS A as a function of R
下载图片 查看原文
图 7. A系统7阶模型纯惯性位置误差随R的变化
Fig. 7. Position error of seven-order model of SINS A as a function of R
下载图片 查看原文
图 8. B系统10阶模型纯惯性位置误差随P3的变化
Fig. 8. Position error of ten-order model of SINS B as a function of P3
下载图片 查看原文
图 9. B系统7阶模型纯惯性位置误差随P3的变化
Fig. 9. Position error of seven-order model of SINS B as a function of P3
下载图片 查看原文
表 1单位置对准各状态量可观测度
Table1. Observability degree of each state in fixed position alignment
| State variable | ϕE | ϕN | ϕU | δvE | δvN | εx | εy | εz | | |
|---|
| Observabilitydegree | 0.81357 | 0.81357 | 9.6793×10-21 | 3.479 | 3.479 | 0.01124 | 0.01124 | 5.7287×10-9 | 2.7266×10-17 | 1.5591×10-17 |
|
查看原文
表 27状态模型可观测维数
Table2. Observable states dimension of seven-order model
| State removed | εz | εy | εyεz | εyεz | εx |
|---|
| Dimension of observable states | 6 | 6 | 5 | 6 | 7 | | State removed | εxεz | εxεz | εxεy | εxεy | εxεyεz | | Dimension of observable states | 6 | 6 | 6 | 7 | 6 |
|
查看原文
表 32种组合各状态量可观测度
Table3. Observability degree of each state of the two combinations
| State variable | ϕE | ϕN | ϕU | δvE | δvN | εy | εz |
|---|
| Observability degree | 0.49648 | 0.49669 | 2.8354×10-7 | 2.7616 | 2.7616 | 0.0044858 | 1.5142×10-9 | | State variable | ϕE | ϕN | ϕU | δvE | δvN | εz | | | Observability degree | 0.49884 | 0.49648 | 2.8354×10-7 | 2.7616 | 2.7628 | 1.5142×10-9 | 1.6622×10-8 |
|
查看原文
表 4两种模型下A系统纯惯性位置误差随P3的变化
Table4. Position errors of two models of SINS A with P3
| P3 | 0.1p3 | 0.2p3 | 0.5p3 | p3 | 10p3 |
|---|
| Maximum position error of ten-order model /m | 1291 | 770 | 491 | 417 | 468 | | Maximum position error of seven-order model /m | 413 | 410 | 408 | 407 | 407 |
|
查看原文
表 5两种模型下A系统纯惯性位置误差随Q及R的变化
Table5. Position errors of two models of SINS A with Q and R
| Q | 0.1q | 1.0q | 10.0q |
|---|
| Maximum position error of ten-order model /m | 417 | 417 | 417 | | Maximum position error of seven-order model /m | 407 | 407 | 407 | | R | 1.0r | 10.0r | 100.0r | | Maximum position error of ten-order model /m | 417 | 420 | 451 | | Maximum position error of seven-order model /m | 407 | 407 | 427 |
|
查看原文
表 6两种模型下B系统纯惯性位置误差随P3的变化
Table6. Position errors of two models of SINS B with P3
| P3 | 0.1p3 | 0.2p3 | 0.5p3 | 1.0p3 | 10.0p3 |
|---|
| Maximum position error of ten-order model /m | 795 | 740 | 715 | 709 | 705 | | Maximum position error of seven-order model /m | 704 | 704 | 704 | 704 | 704 |
|
查看原文
王琦, 高春峰, 应智慧, 魏国, 龙兴武. 捷联惯导系统单位置初始对准可观测性分析[J]. 中国激光, 2018, 45(1): 0101004. Wang Qi, Gao Chunfeng, Ying Zhihui, Wei Guo, Long Xingwu. Observability Analysis of Fixed Position Initial Alignment of Strapdown Inertial Navigation System[J]. Chinese Journal of Lasers, 2018, 45(1): 0101004.











 PDF全文
PDF全文

