激光与光电子学进展, 2019, 56 (22): 221504, 网络出版: 2019-11-02
基于相关系数平方和最大的三维点云配准  下载: 974次
下载: 974次
Three-Dimensional Point Cloud Registration Based on Maximum Sum of Squares of Correlation Coefficients
图 & 表
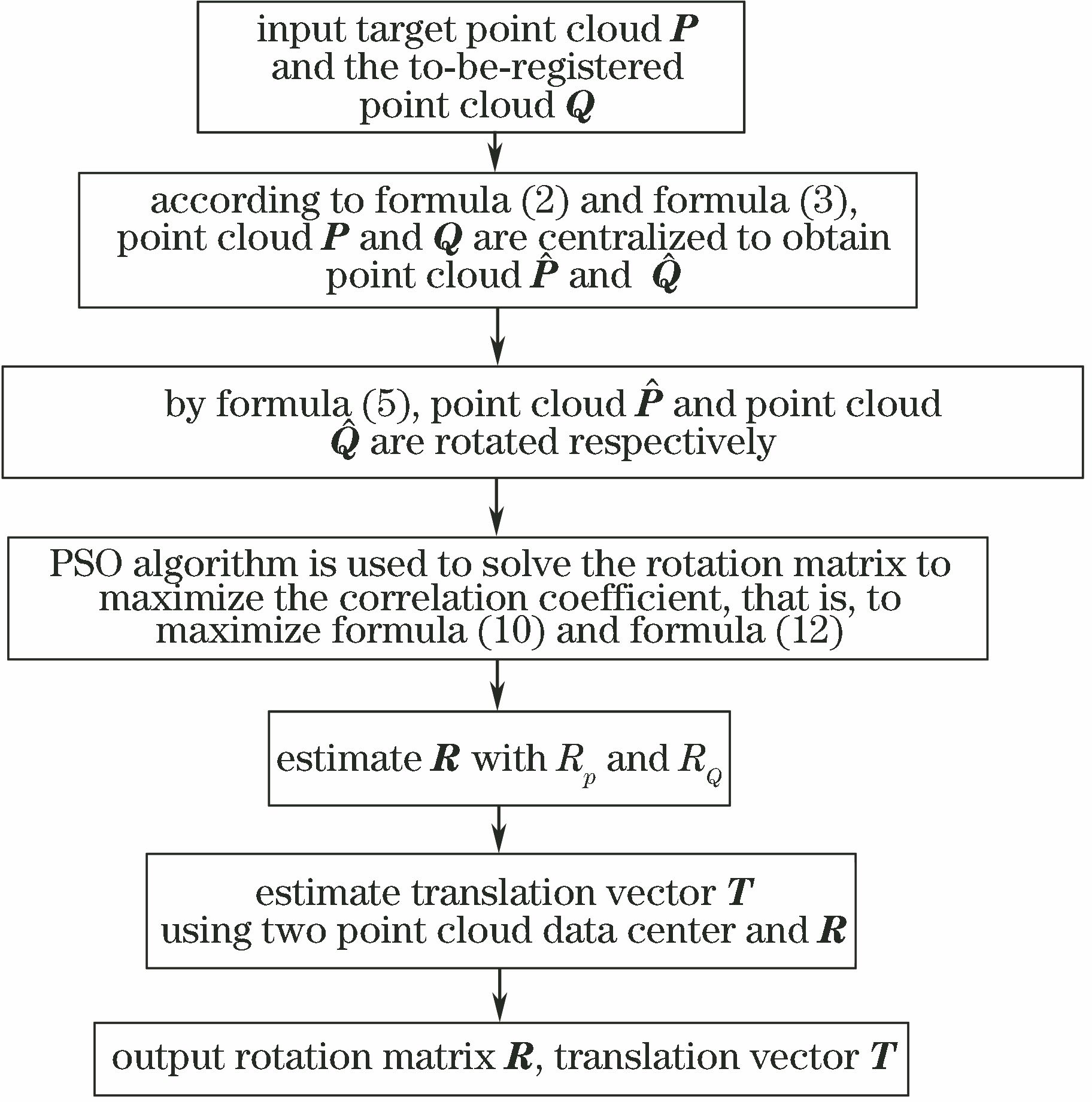
图 2. 点云Bunny的初始状态。(a)加高斯白噪声;(b)未加高斯白噪声
Fig. 2. Initial state of point cloud for Bunny. (a) With white Gaussian noise; (b) without white Gaussian noise

图 3. 各算法对Bunny点云配准效果。(a) MCC;(b) ICP;(c) Scale-ICP;(d) CPD
Fig. 3. Registration effect of each algorithm for Bunny point cloud. (a) MCC; (b) ICP; (c) Scale-ICP; (d) CPD

图 4. 机械器件点云的初始状态。(a)待配准点云;(b)目标点云
Fig. 4. Initial state of point cloud for mechanical device. (a) Point cloud to be registered; (b) target point cloud


表 1各算法对Bunny点云的配准时间及误差
Table1. Registration time and error of each algorithm for Bunny point cloud
|
表 2各算法对机械点云的配准时间及误差
Table2. Registration time and error of each algorithm for mechanical device
|
苗长伟, 唐志荣, 唐英杰. 基于相关系数平方和最大的三维点云配准[J]. 激光与光电子学进展, 2019, 56(22): 221504. Changwei Miao, Zhirong Tang, Yingjie Tang. Three-Dimensional Point Cloud Registration Based on Maximum Sum of Squares of Correlation Coefficients[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221504.



 PDF全文
PDF全文

