激光与光电子学进展, 2020, 57 (22): 221107, 网络出版: 2020-11-11
基于大气偏振模式的三维姿态角解算方法  下载: 955次
下载: 955次
Calculation Method of Three-dimensional Attitude Angle Based on Atmospheric Polarization Pattern
图 & 表
图 1. 姿态坐标系示意图。(a)坐标系及坐标变换;(b)姿态角变换
Fig. 1. Schematic of posture coordinate system. (a) coordi-nate system and coordinate transformation; (b) attitude angle transformation
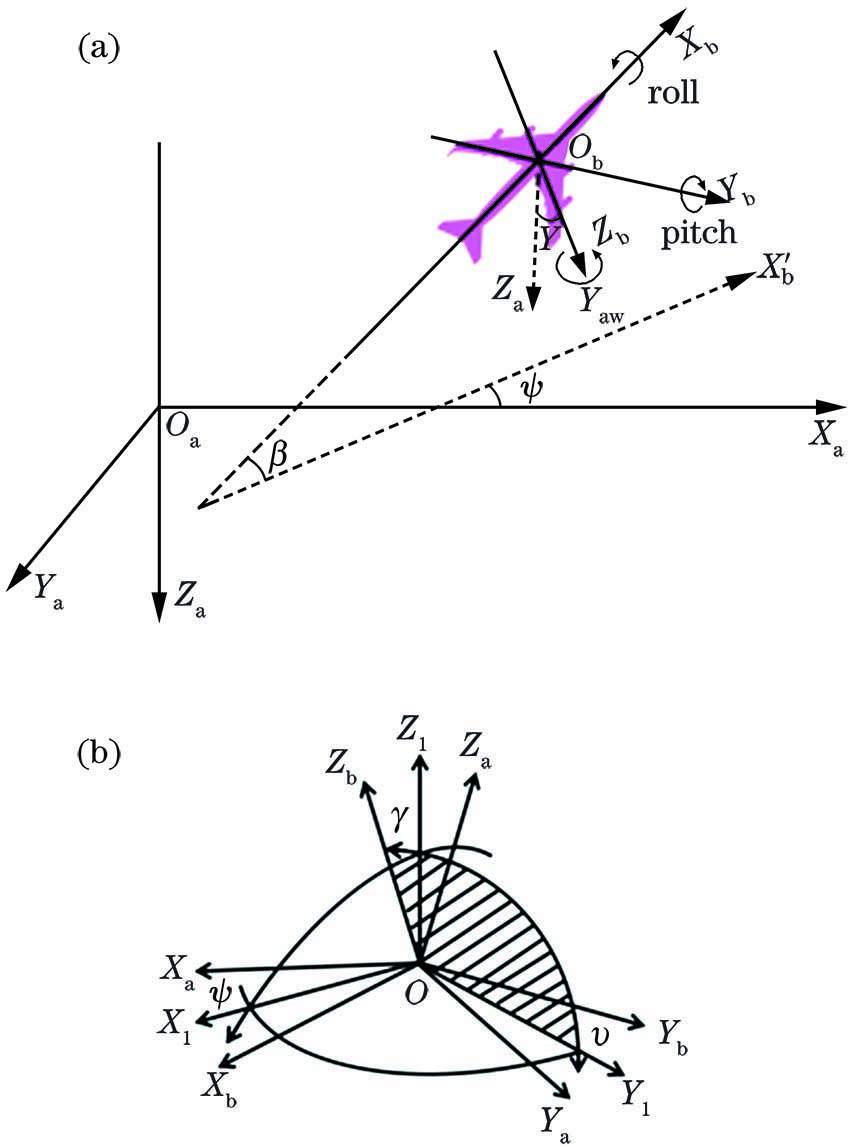

图 3. 太阳空间位置的提取。(a)偏振度在全天域空中的分布;(b) K-means聚类数据簇;(c) K-means簇中心
Fig. 3. Extraction of space position of sun. (a) Distribution of degree of polarization in entire sky; (b) K-means cluster data cluster; (c) K-means cluster center



图 6. 大气偏振模式测量系统。(a)测试平台;(b)搭载AHRS的平台;(c)载体的转动轴;(d)鱼眼镜头的坐标轴
Fig. 6. Atmospheric polarization mode measurement system. (a) Test platform; (b) platform equipped with AHRS; (c) rotation axis of carrier; (d) coordinate axis of fisheye lens

图 7. 不同方法得到的仿真数据。(a1)(a2)全天域大气偏振度;(b1)(b2)权重聚类;(c1)(c2) K-mean算法
Fig. 7. Simulation datas obtained by different methods. (a1)(a2) Degree of atmospheric polarization in entire sky; (b1)(b2) weighted clustering; (c1)(c2) K-mean algorithm

图 8. 俯仰角和横滚角的角度的变化及误差分布。(a)角度变化曲线;(b)角度误差变化曲线
Fig. 8. Angle change and error distribution of pitch angle and roll angle. (a) Angle variation curves; (b) angle error variation curves

图 9. 外场实验数据。(a1)(a2)原始图像;(b1)(b2)偏振度分布;(c1)(c2)太阳位置矢量
Fig. 9. Field experiment datas. (a1) (a2) Original images; (b1) (b2) polarization distribution; (c1) (c2) sun position vector

图 10. 外场实验测试。(a)外场实验测试角度变化曲线;(b)外场实验角度误差曲线
Fig. 10. Field experiment test. (a) Test angle variation curves in field experiment; (b) angle error curves in field experiment


表 1太阳位置矢量坐标及姿态角的解算结果
Table1. Solving results of sun position vector coordinates and attitude angle
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
表 2检测的解算数据
Table2. Solution data of detection
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
杨江涛, 王健安, 王银, 胡啸. 基于大气偏振模式的三维姿态角解算方法[J]. 激光与光电子学进展, 2020, 57(22): 221107. Jiangtao Yang, Jian'an Wang, Yin Wang, Xiao Hu. Calculation Method of Three-dimensional Attitude Angle Based on Atmospheric Polarization Pattern[J]. Laser & Optoelectronics Progress, 2020, 57(22): 221107.



 PDF全文
PDF全文

