光学学报, 2020, 40 (1): 0111019, 网络出版: 2020-01-06
基于相位映射的双目视觉缺失点云插补方法  下载: 1537次
下载: 1537次
Method for Interpolation of Missing Point Cloud Based on Phase Mapping in Binocular Vision
图 & 表

图 3. 双目视觉系统测量数据展示。(a)左相机成像变形条纹图;(b)右相机成像变形条纹图;(c)人脸面具重建结果
Fig. 3. Display of binocular vision system measurement data. (a) Distorted fringe image of left camera; (b) distorted fringe image of right camera; (c) reconstructed result of facial mask
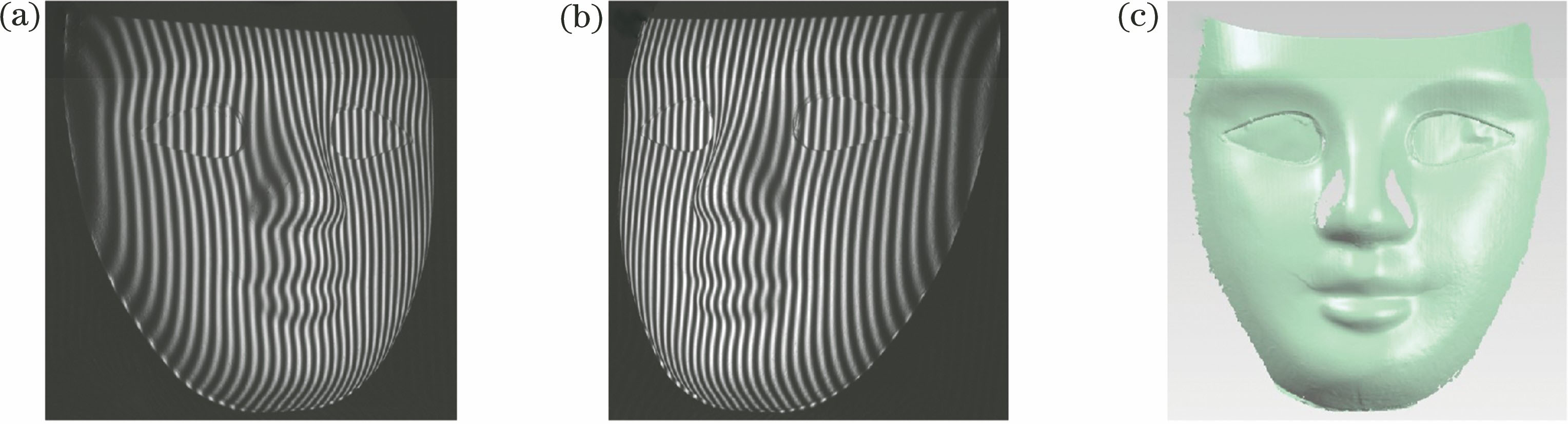
图 4. 隐式相位-高度映射关系标定示意图
Fig. 4. Calibration diagram of implicit phase-height mapping relationship
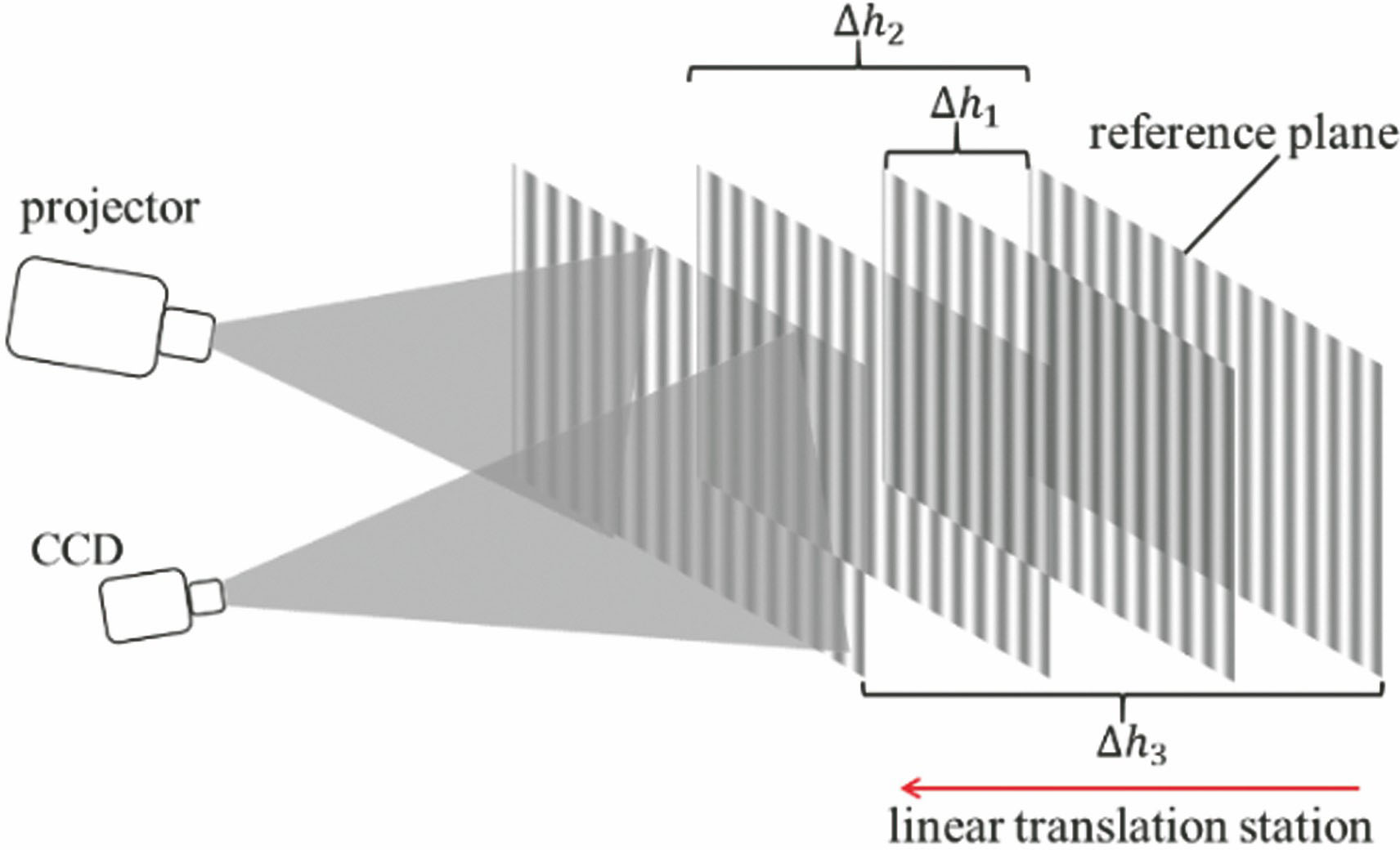
图 5. 隐式相位-高度映射关系标定参数分析。(a) a(u,v);(b) b(u,v);(c) c(u,v)
Fig. 5. Analysis on calibration parameter of implicit phase-height mapping relationship. (a) a(u,v); (b) b(u,v); (c) c(u,v)

图 6. 相机采集的条纹图和条纹频谱图。(a)沿竖直方向分布的条纹图;(b)倾斜条纹图;(c)条纹图像傅里叶频谱分布
Fig. 6. Fringe patterns taken by camera and fringe spectrum. (a) Vertically distributed fringe pattern; (b) inclined fringe pattern; (c) Fourier spectrum distribution of fringe pattern


图 10. 双球标准件的测量结果。(a)双球标准件去除部分数据作为待插补点云;(b)用所提方法进行点云插补的结果
Fig. 10. Measurement results of standard sample with two balls. (a) Remove part of complete point cloud data of standard sample as holes to be interpolated; (b) interpolated result by proposed method
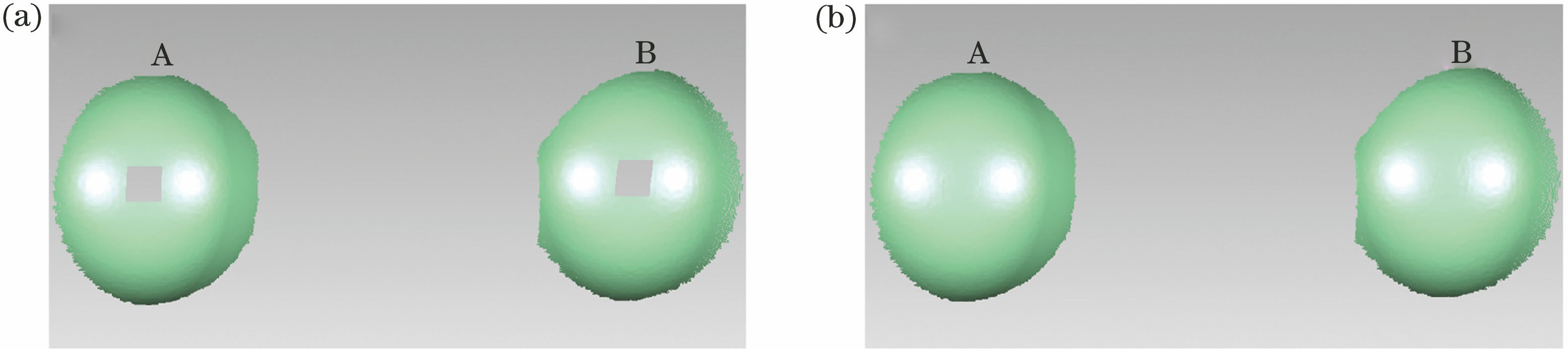
图 11. 人脸面具重建结果。(a)两侧鼻翼存在局部点云缺失,上嘴唇存在人为扣除部分数据的重建结果;(b)所提方法插补结果;(c)左鼻翼插补点云数据;(d)右鼻翼插补点云数据;(e)上嘴唇插补点云数据;(f)上嘴唇点云扣除区域中间行和列插补结果与测量结果的差异分布
Fig. 11. Reconstructed result of facial mask. (a) Reconstructed result with local point cloud data missing on both sides of nose and some point cloud data artificially deducted in upper lip; (b) interpolated result of proposed method; (c) interpolated point cloud data in left nasal alar; (d) interpolated point cloud data in right nasal alar; (e) interpolated point cloud data in upper lip; (f) difference distribution between interpolated result and measured result of point cloud deducted area in upper lip
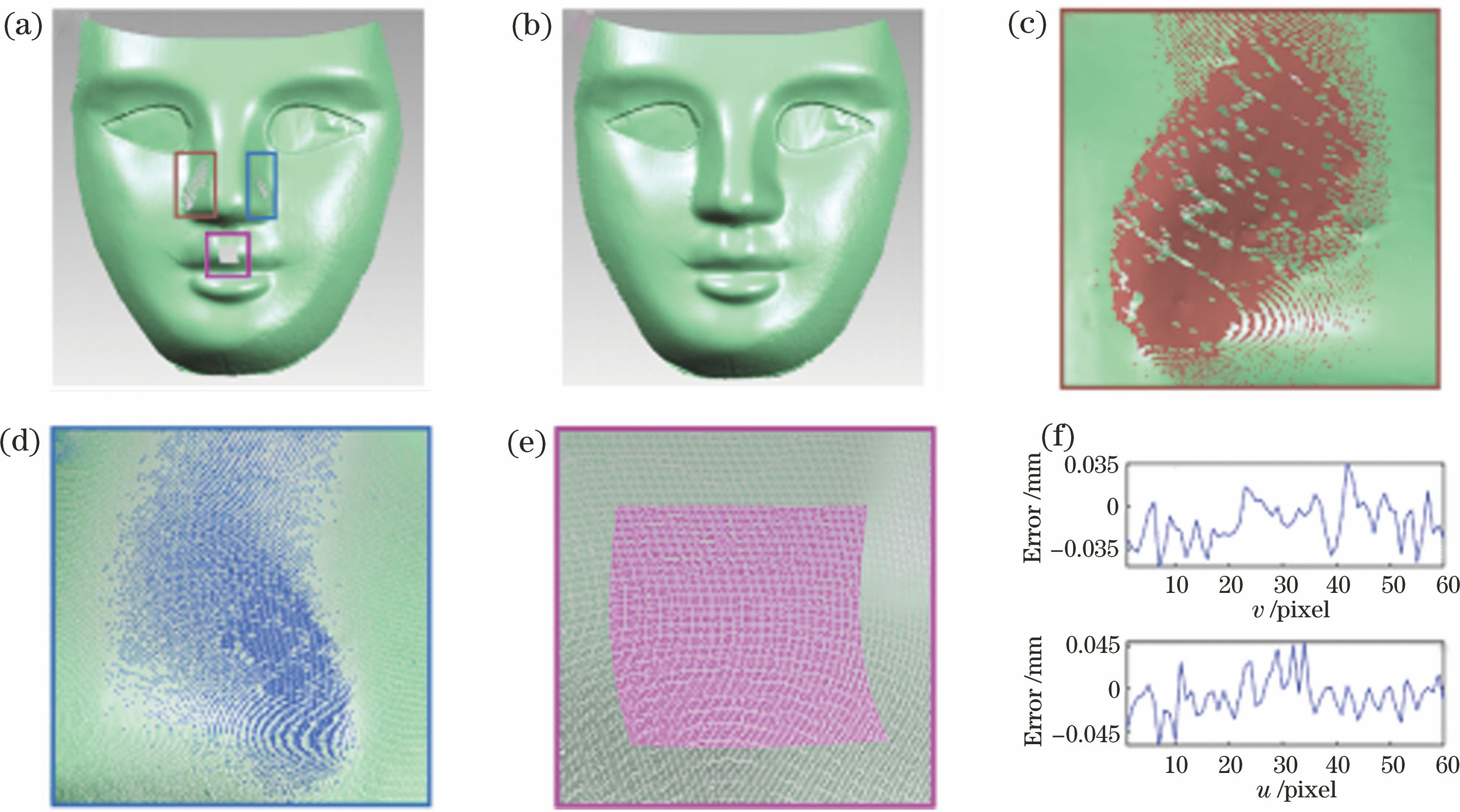
图 12. 人脸面具Geomagic插补结果。(a)使用Geomagic软件对人脸面具鼻翼两侧和上嘴唇人为扣除孔洞进行插补的结果;(b)左鼻翼Geomagic插补点云数据;(c)右鼻翼Geomagic插补点云数据;(d)上嘴唇Geomagic插补点云数据;(e)上嘴唇区域所提方法插补结果与Geomagic插补结果的对比;(f)上嘴唇点云扣除区域中间行和列Geomagic插补结果与双目视觉系统测量结果的差异分布
Fig. 12. Interpolated results of facial mask by Geomagic. (a) Reconstructed result by Geomagic with local point cloud data missing on both sides of nose and some point cloud data artificially deducted in upper lip; (b) interpolated point cloud data by Geomagic in left nasal alar; (c) interpolated point cloud data by Geomagic in right nasal alar; (d) interpolated point cloud data by Geomagic in upper lip; (e) comparison of interpolated results of proposed method and Geomagic in upper lip; (f) difference d
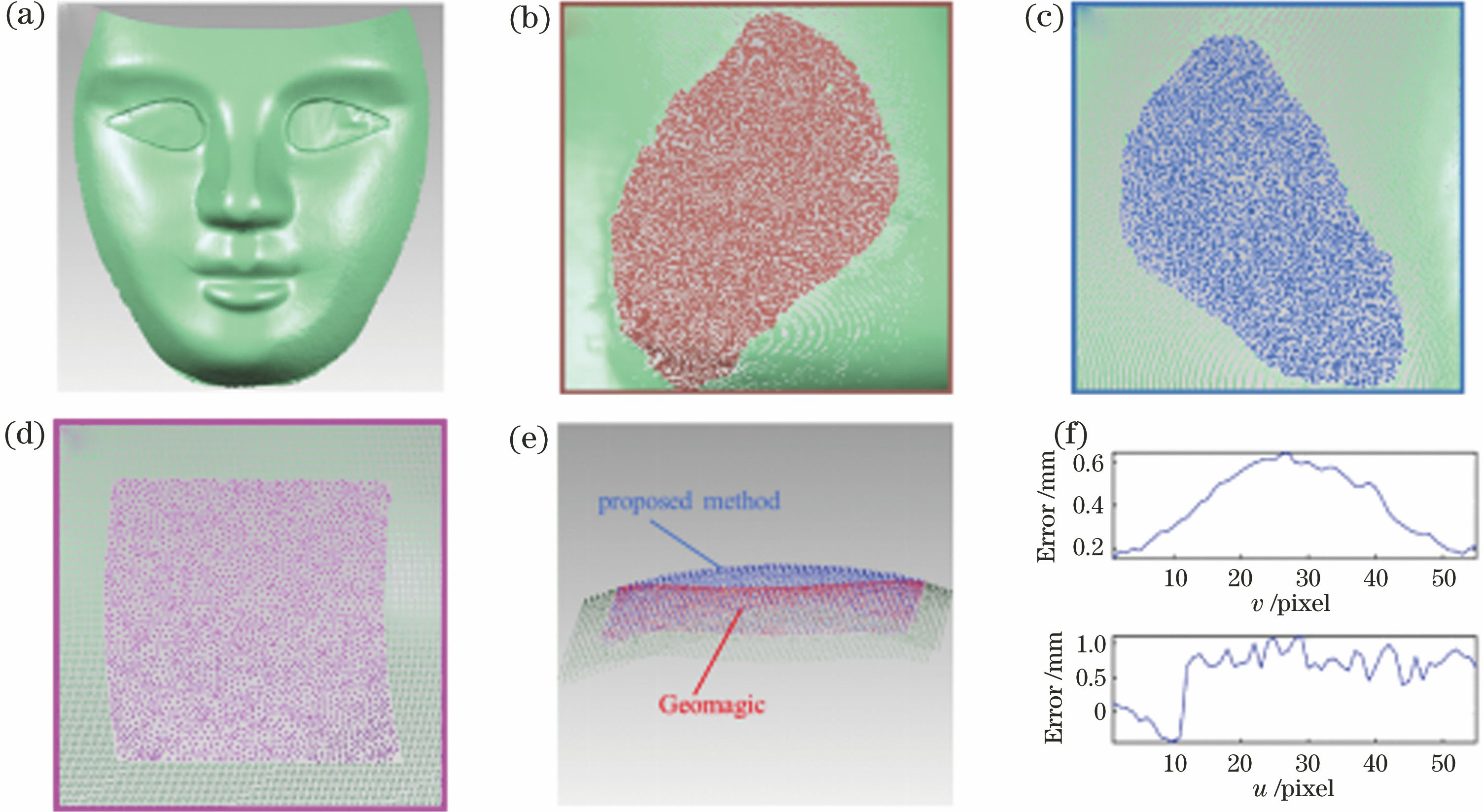
图 13. 葫芦模型实验结果。(a)两端和中间部位存在缺失的双目重建结果;(b)所提方法插补的重建结果;(c)插补后的左端点云数据;(d)插补后的右端点云数据
Fig. 13. Experiment results of gourd model. (a) Binocular reconstructed result with point cloud absence in both ends and middle part; (b) interpolated result of proposed method; (c) interpolated point cloud data in left end; (d) interpolated point cloud data in right end

表 1双目视觉系统及所提方法的精度评价结果
Table1. Accuracy evaluation of binocular vision system and proposed methodmm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
李承杭, 薛俊鹏, 郎威, 张启灿. 基于相位映射的双目视觉缺失点云插补方法[J]. 光学学报, 2020, 40(1): 0111019. Chenghang Li, Junpeng Xue, Wei Lang, Qican Zhang. Method for Interpolation of Missing Point Cloud Based on Phase Mapping in Binocular Vision[J]. Acta Optica Sinica, 2020, 40(1): 0111019.



 PDF全文
PDF全文

