光栅结构光系统测量误差与拟合精度研究  下载: 1101次
下载: 1101次
Measurement Error and Fitting Accuracy of Fringe Structured Light System
1 中国科学院半导体研究所光电系统实验室, 北京 100083
2 中国科学院大学材料与光电研究中心, 北京 100049
图 & 表
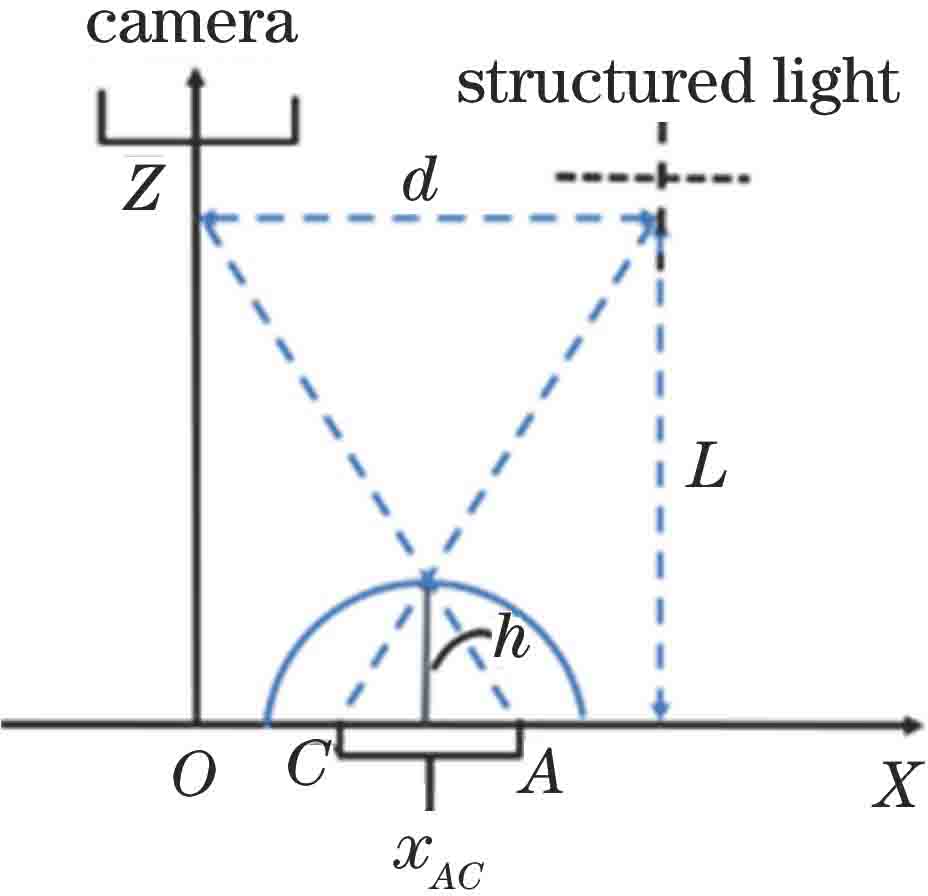
图 1. 光栅投影结构光系统高度测量原理
Fig. 1. Height measurement principle for fringe projection structured light system
下载图片 查看原文
图 2. 基于测量环境的误差确定方法
Fig. 2. An error determination method based on measurement environment
下载图片 查看原文
图 3. 光栅投影结构光测量系统。(a)示意图;(b)现场图
Fig. 3. Fringe projection structured light measurement system. (a) Schematic; (b) site photo
下载图片 查看原文
图 4. 高度测量误差随空间和时间的变化。(a)某一位置处沿横向的高度测量误差;(b)任意三点的高度测量误差随空间的变化;(c)任意三点的高度测量误差随时间的变化
Fig. 4. Height measurement error variation with space and time. (a) Horizontal height measurement error at certain position; (b) height measurement error variation of any three points with space; (c) height measurement error variation of any three points with time
下载图片 查看原文
图 5. 高度测量误差。(a)均值与标准差;(b)均方根误差
Fig. 5. Height measurement error. (a) Average and standard deviation; (b) root-mean-square error
下载图片 查看原文
图 6. 不同概率分布的拟合结果。(a)密度图;(b)概率图
Fig. 6. Fitting result for different probability distributions. (a) Density graph; (b) probability graph
下载图片 查看原文
图 7. 正态分布下的参数计算结果
Fig. 7. Parameter calculation results under normal distribution
下载图片 查看原文
图 8. 平面测量误差采集。(a)实验场景图;(b)圆点提取结果
Fig. 8. Plane measurement error acquisition. (a) Site photo; (b) point extract result
下载图片 查看原文
图 9. 平面测量误差分布。(a)散点图;(b)直方图
Fig. 9. Plane measurement error distribution. (a) Scatter diagram; (b) histogram
下载图片 查看原文
图 10. 平面拟合结果。(a)没有噪声;(b)添加噪声
Fig. 10. Plane fitting result. (a) Without noise; (b) with noise
下载图片 查看原文
图 11. 平板数据采集。(a)实物图;(b)点云图
Fig. 11. Plane data acquisition. (a) Site photo; (b) point cloud image
下载图片 查看原文
图 12. 模拟与实际测量的模型误差
Fig. 12. Error from simulation and actual results
下载图片 查看原文
图 13. 柱面的拟合结果。(a)没有噪声;(b)添加噪声
Fig. 13. Cylinder fitting results. (a) Without noise; (b) with noise
下载图片 查看原文
图 14. 柱体数据的采集。(a)实物图;(b)点云图
Fig. 14. Cylinder data acquisition. (a) Site photo; (b) point cloud image
下载图片 查看原文
表 13D相机的性能参数
Table1. 3D camera performance parameters
| Scanning speed /(frame·s-1) | Resolution /pixel | Centerdistance /mm | Measurementrange /mm | Field of view /(mm×mm) | Repeatability /μm |
|---|
| 2.1 | 3.2×106 | 1500 | ±300 | 600×450 | 75 |
|
查看原文
表 2标定板规格参数
Table2. Calibration plane specifications
| Points perrow | Points percolumn | Dimension /(mm×mm) | Distance betweencenters /mm | Pointradius /mm | Accuracy /μm |
|---|
| 7 | 7 | 200×200 | 25 | 6.25 | ±30 |
|
查看原文
表 3不同高度下的平面分辨率
Table3. Plane resolution at different height values
| Height /m | Field of view /(mm×mm) | Resolution /mm | Number of points /106 |
|---|
| 1.2 | 550×410 | 0.266 | 0.814 | | 1.4 | 630×470 | 0.305 | 0.620 | | 1.6 | 720×540 | 0.350 | 0.472 | | 1.8 | 810×605 | 0.392 | 0.374 |
|
查看原文
表 4模拟与实际测量的模型参数误差
Table4. Model parameter error between simulated and measured data
| Parameter | Simulated result | Measurement result |
|---|
| Radius /mm | 186.395±0.217 | 186.131±0.123 |
|
查看原文
王潇, 刘育梁, 李丽艳. 光栅结构光系统测量误差与拟合精度研究[J]. 中国激光, 2020, 47(6): 0604004. Wang Xiao, Liu Yuliang, Li Liyan. Measurement Error and Fitting Accuracy of Fringe Structured Light System[J]. Chinese Journal of Lasers, 2020, 47(6): 0604004.

















 PDF全文
PDF全文

