基于粒子滤波的运动目标光电定位仿真研究
Simulation on photoelectric positioning of moving targets based on particle filter
图 & 表
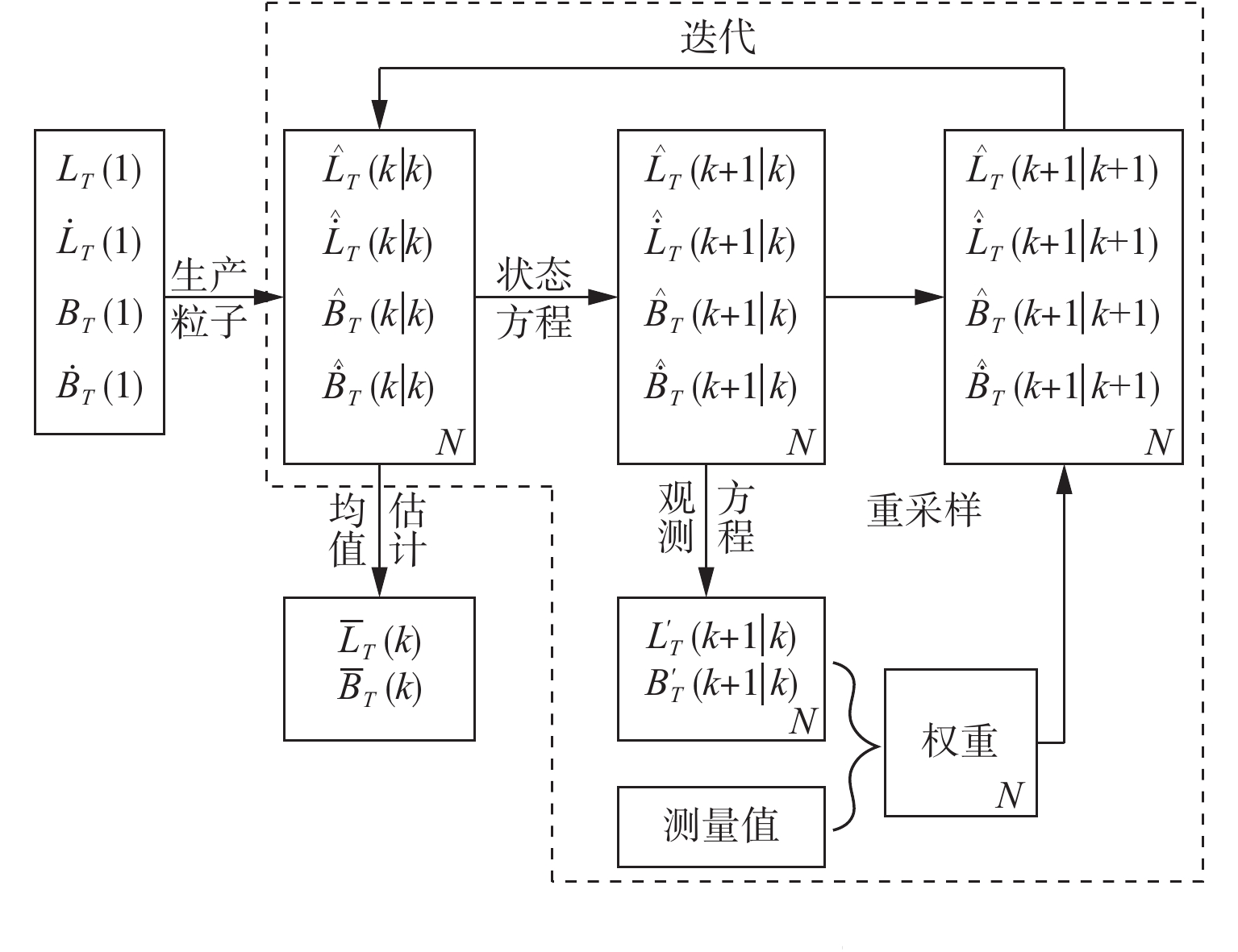
图 1. 无源目标定位粒子滤波算法流程
Fig. 1. Flow chart of passive target positioning particle filter algorithm
下载图片 查看原文
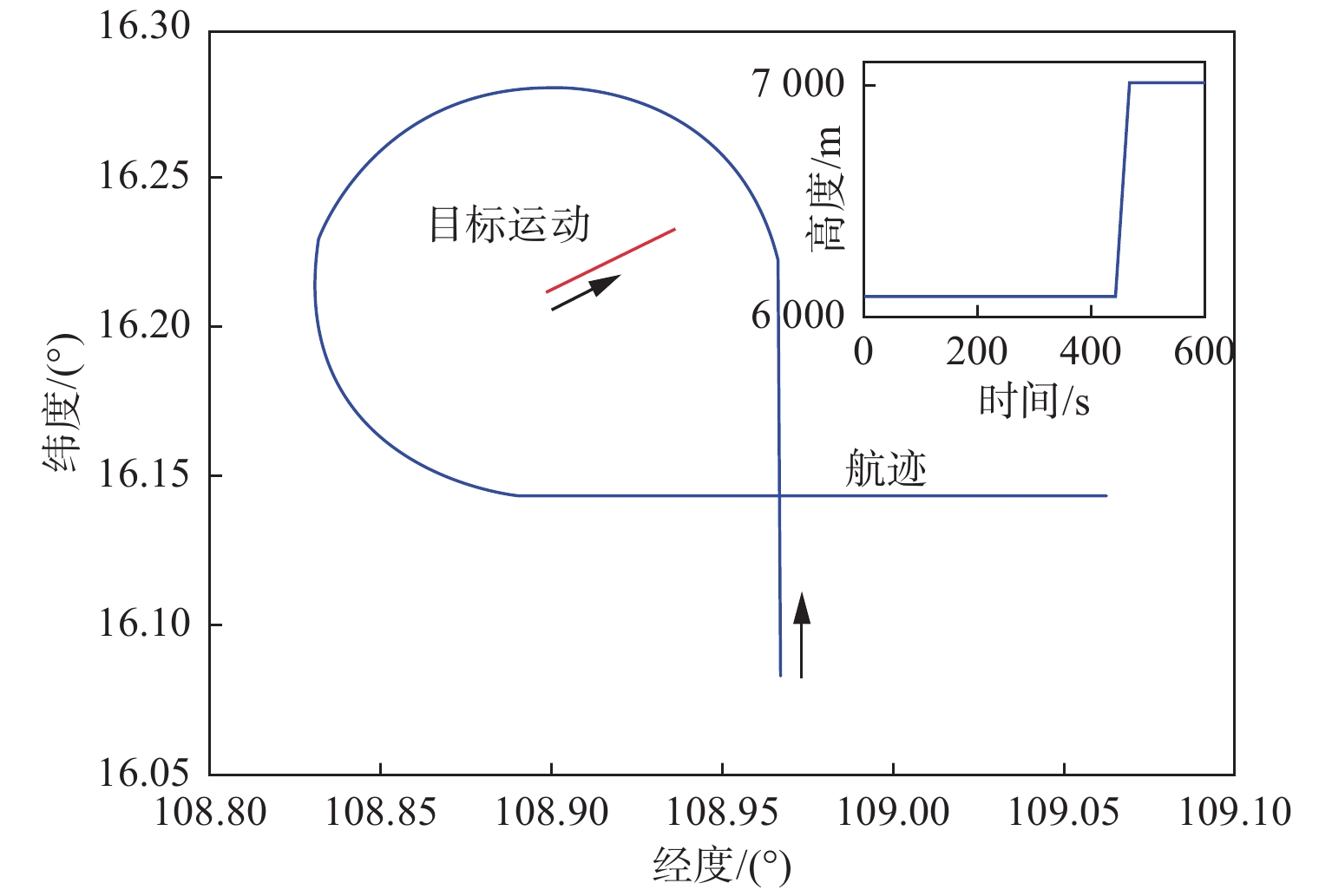
图 2. 载机航迹与目标运动
Fig. 2. Aircraft track and target motion
下载图片 查看原文
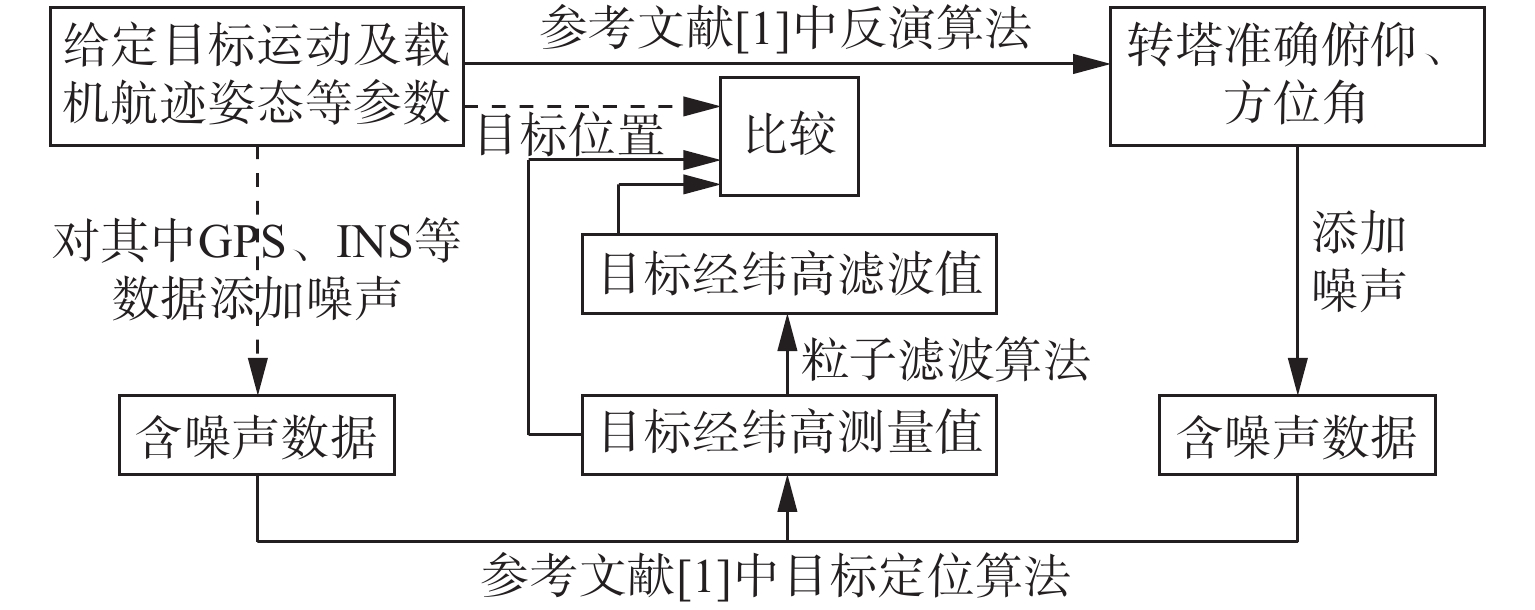
图 3. 分析思路
Fig. 3. Analytical route
下载图片 查看原文
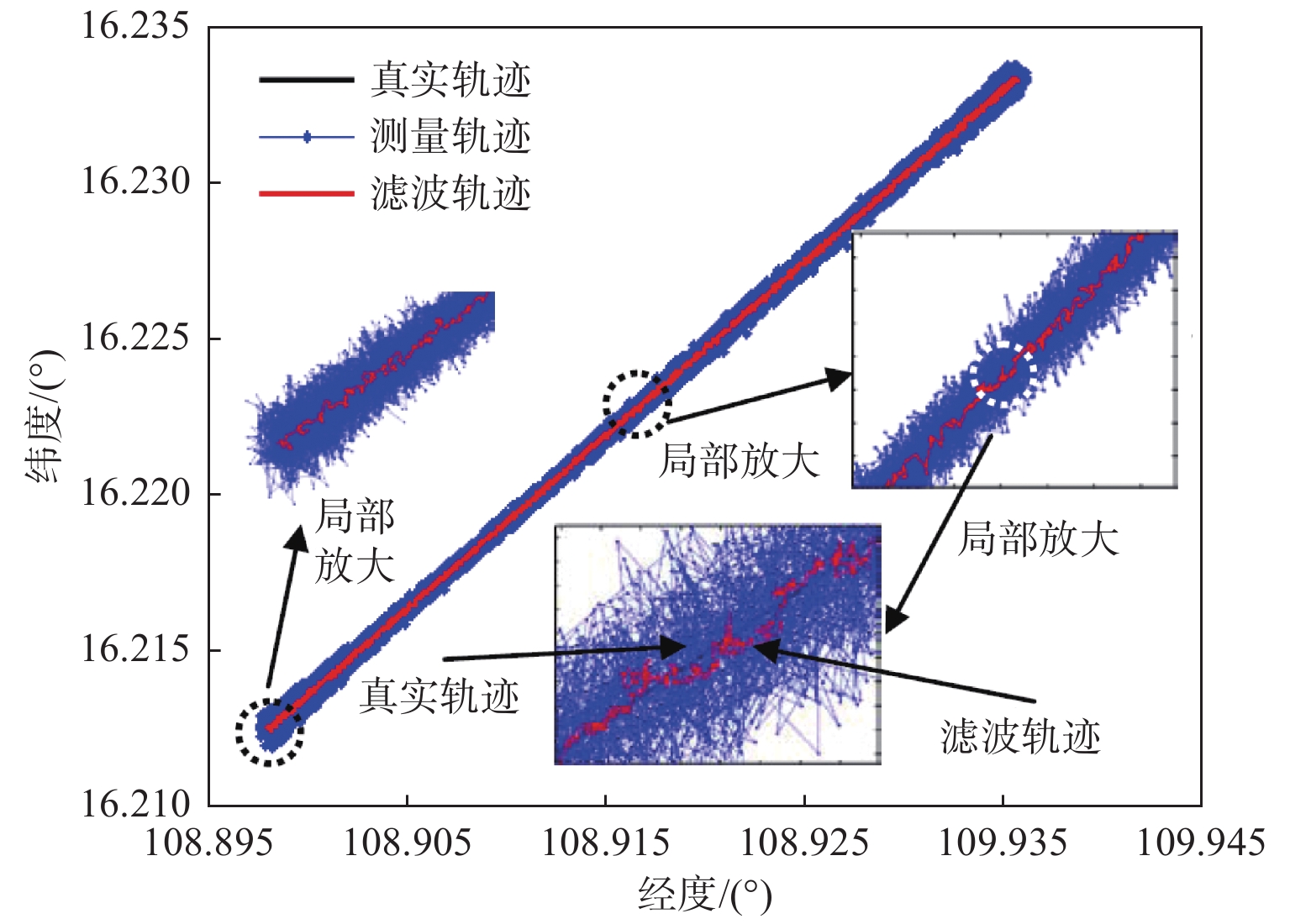
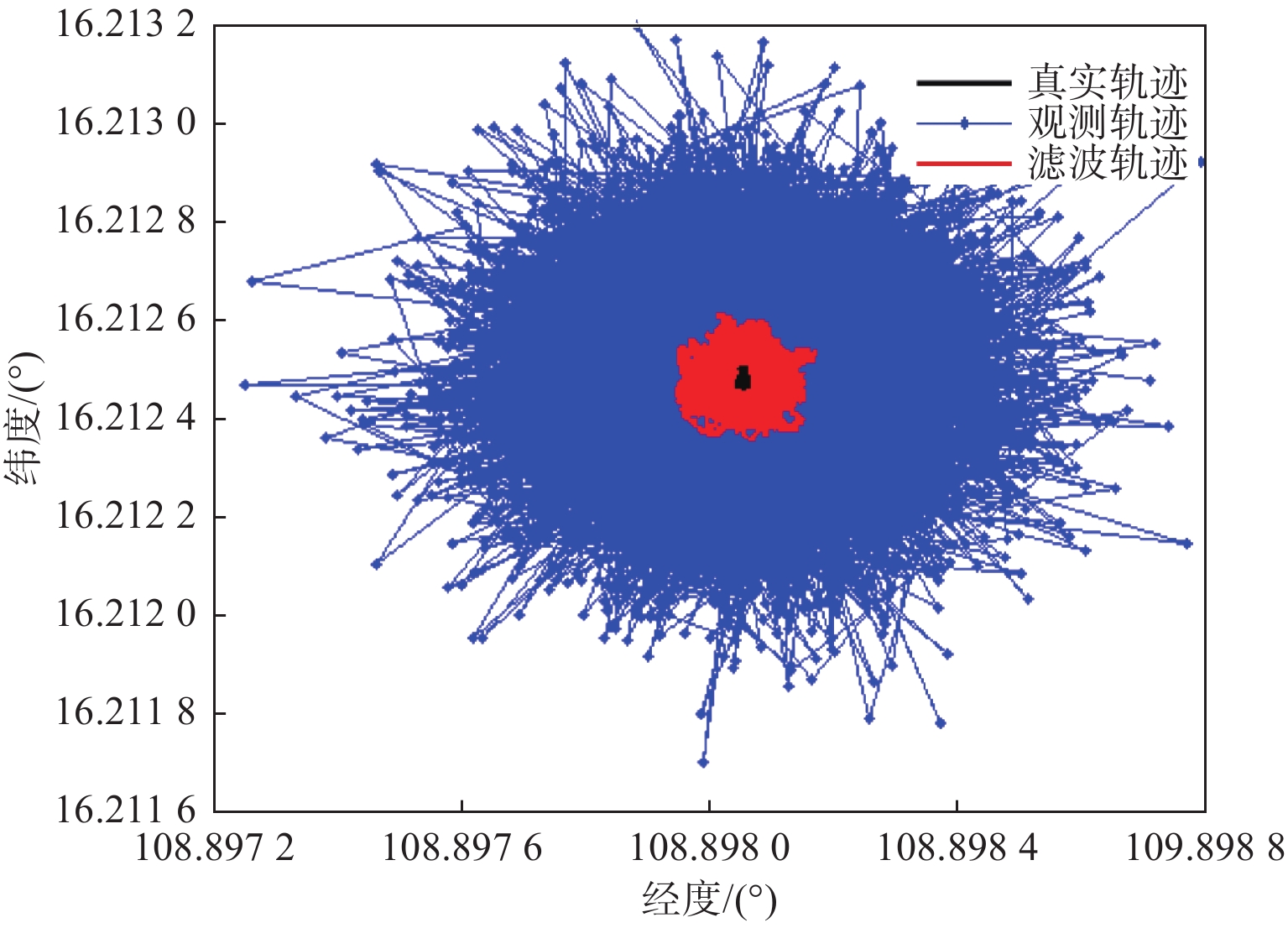
图 4. 含测量噪声的目标轨迹、测量轨迹与滤波轨迹
Fig. 4. Target track, located track and filtering track with measurement noise
下载图片 查看原文
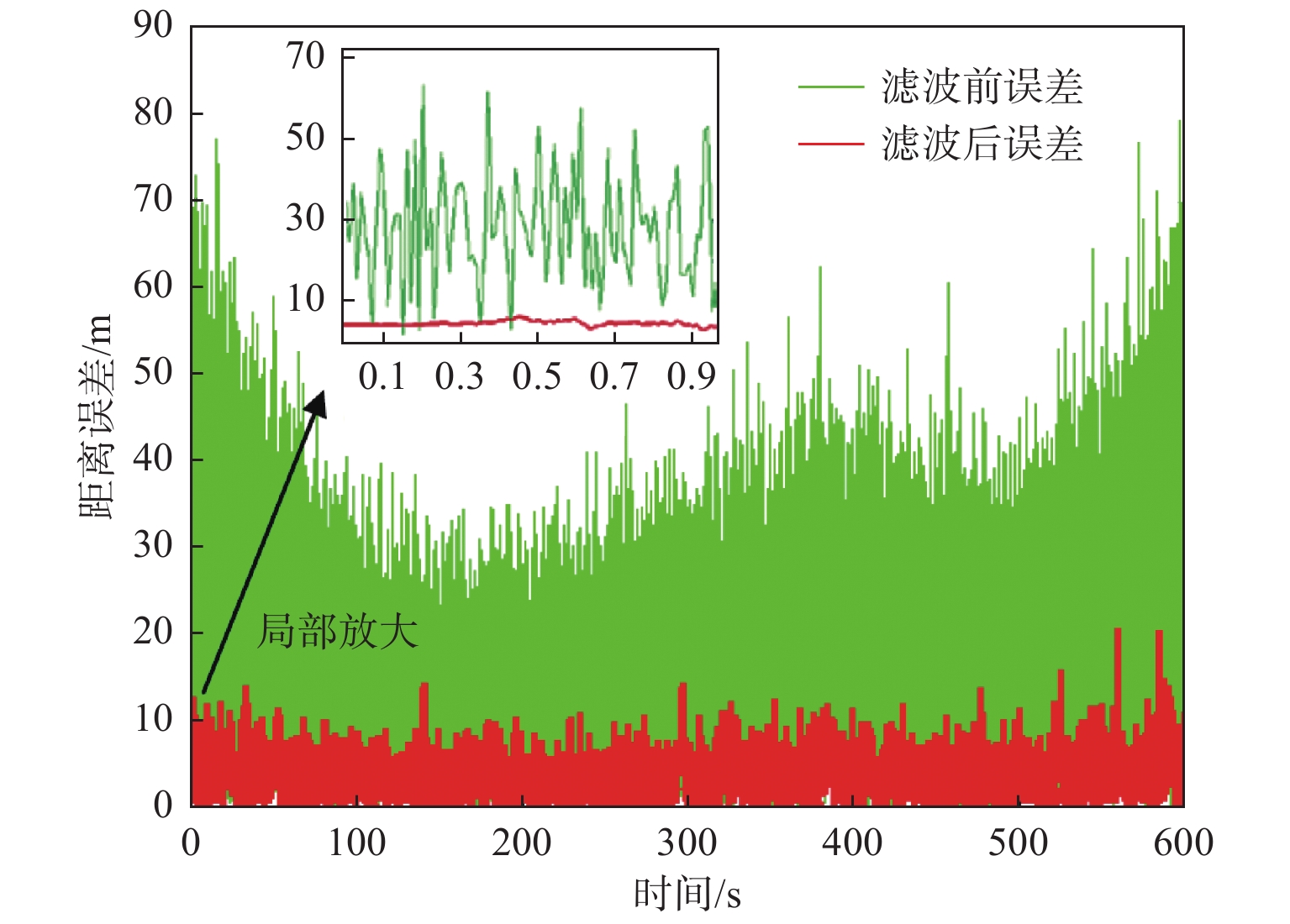
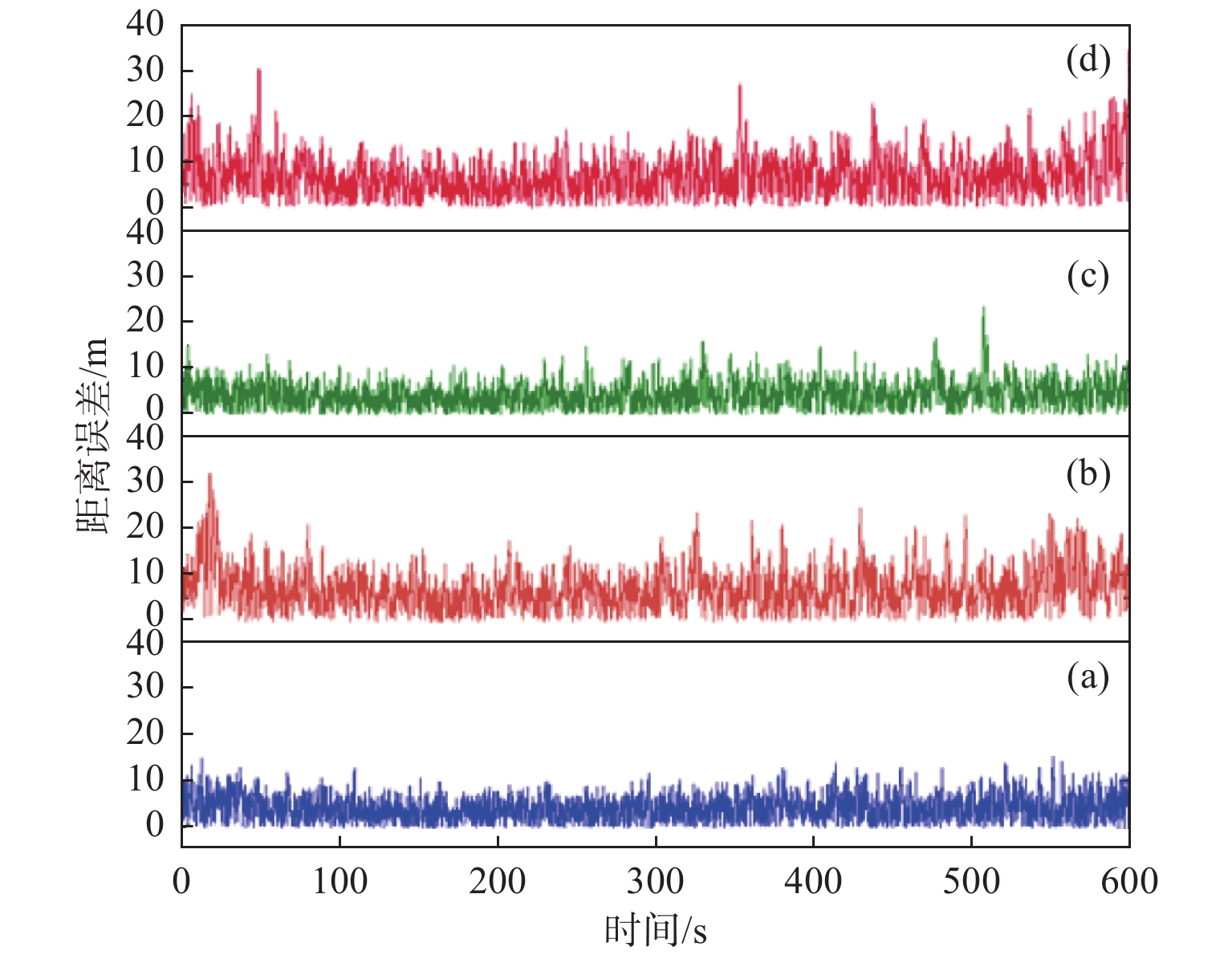
图 5. 含测量噪声情况下滤波前后的定位误差
Fig. 5. Positioning error before and after filtering with measurement noise
下载图片 查看原文
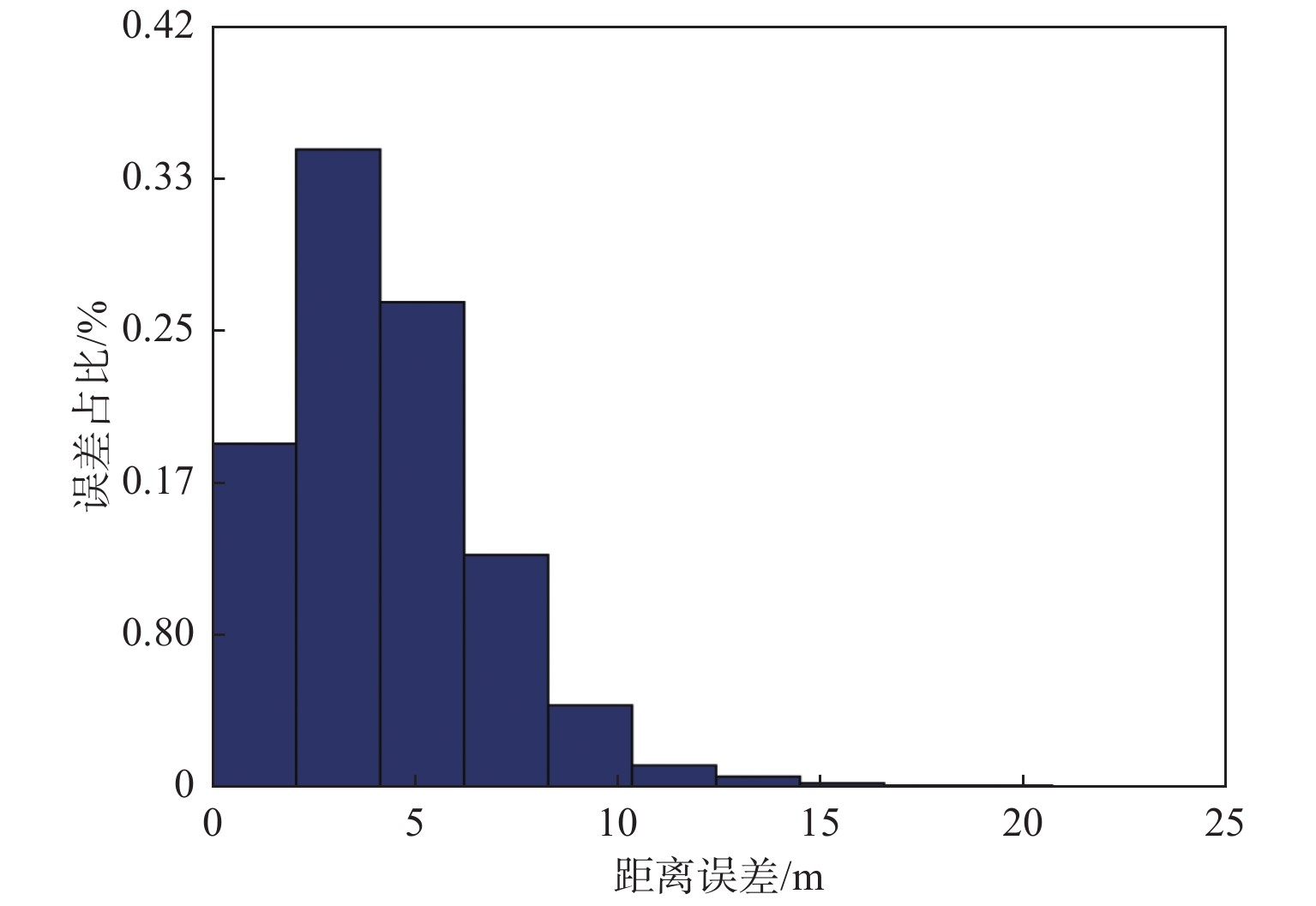
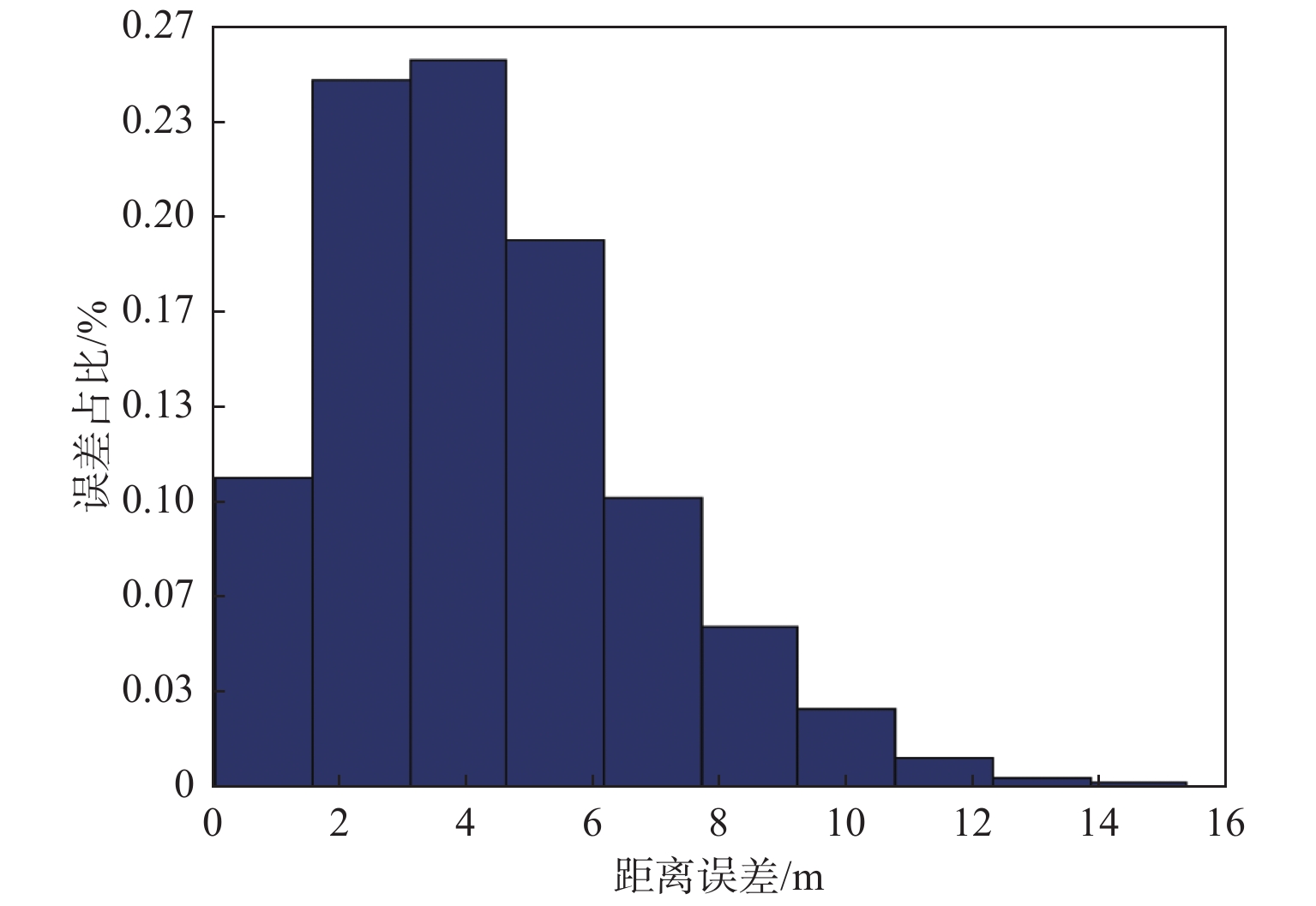
图 6. 含测量噪声情况下滤波稳定后的定位误差分布
Fig. 6. Positioning error distribution after filtering stabilization with measurement noise
下载图片 查看原文
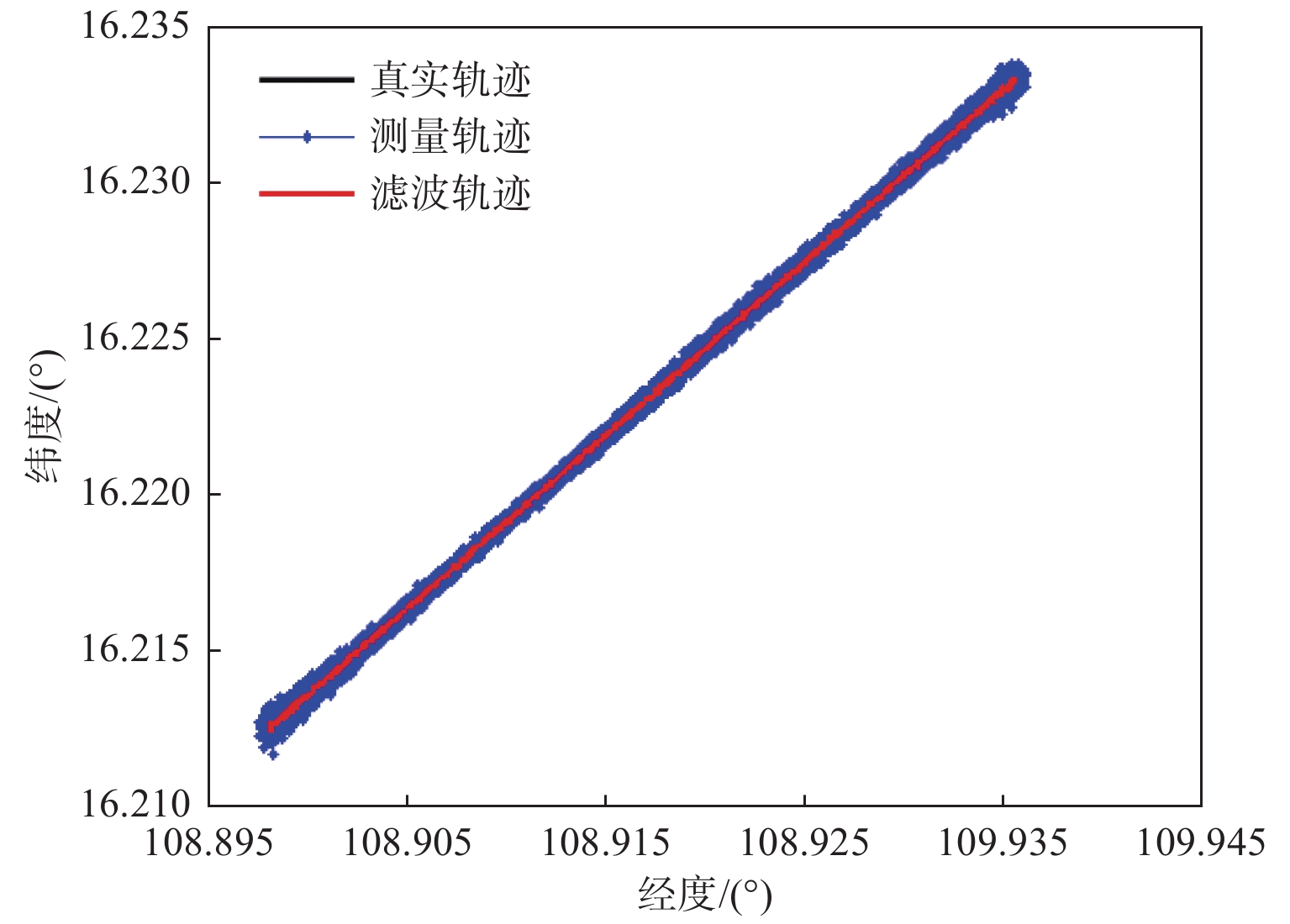
图 7. 含测量和目标运动噪声的目标轨迹、测量轨迹与滤波轨迹
Fig. 7. Target track, located track and filter track with measurement and target motion noises
下载图片 查看原文
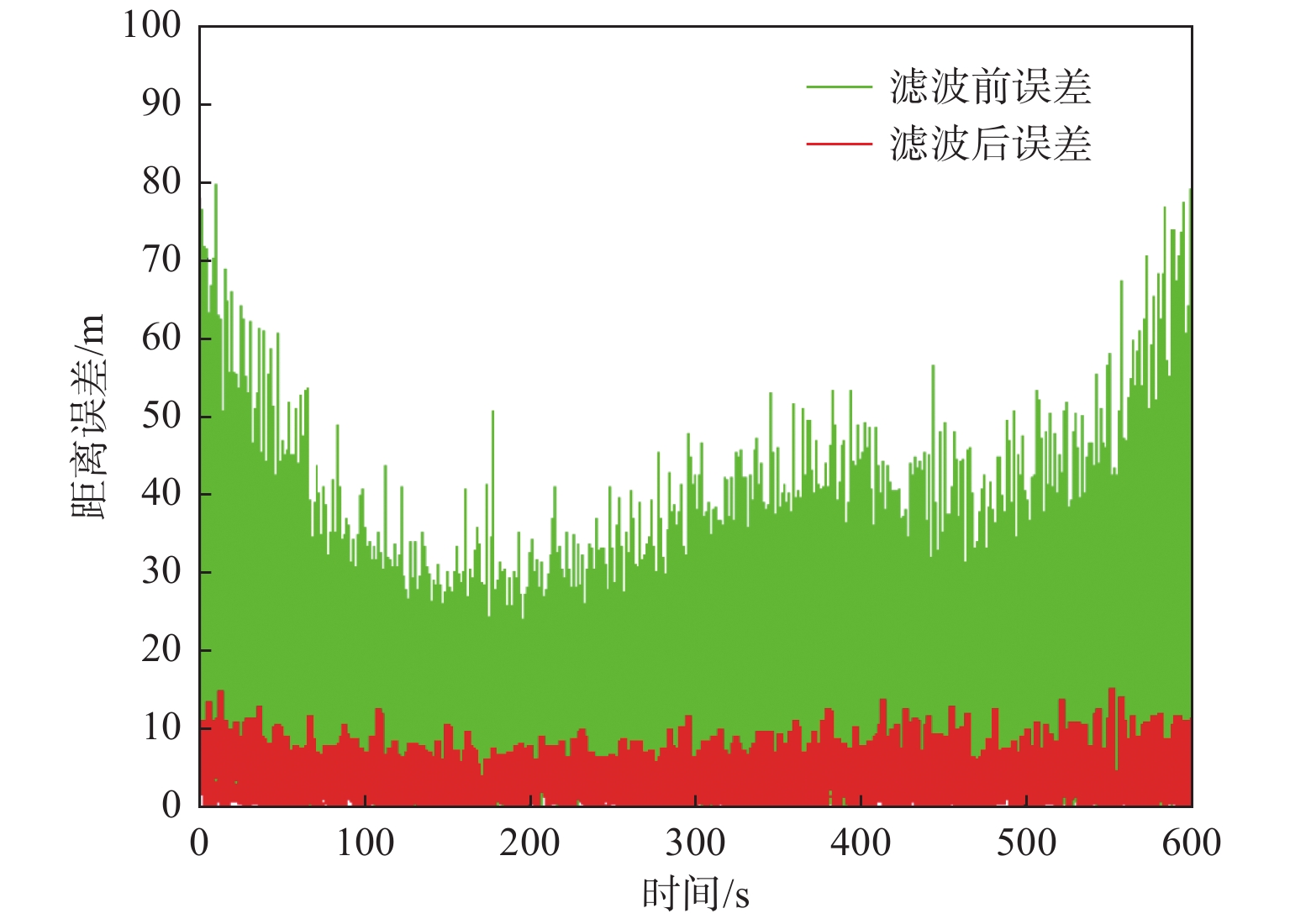
图 8. 含测量和目标运动噪声情况下滤波前后的定位误差
Fig. 8. Positioning error before and after filtering with measurement and target motion noises
下载图片 查看原文
图 9. 含测量和目标运动噪声情况下滤波稳定后的定位误差分布
Fig. 9. Positioning error distribution after filtering stabilization with measurement and target motion noises
下载图片 查看原文
图 10. 噪声强度对滤波效果的影响
Fig. 10. Influence of noise intensity on filtering effect
下载图片 查看原文
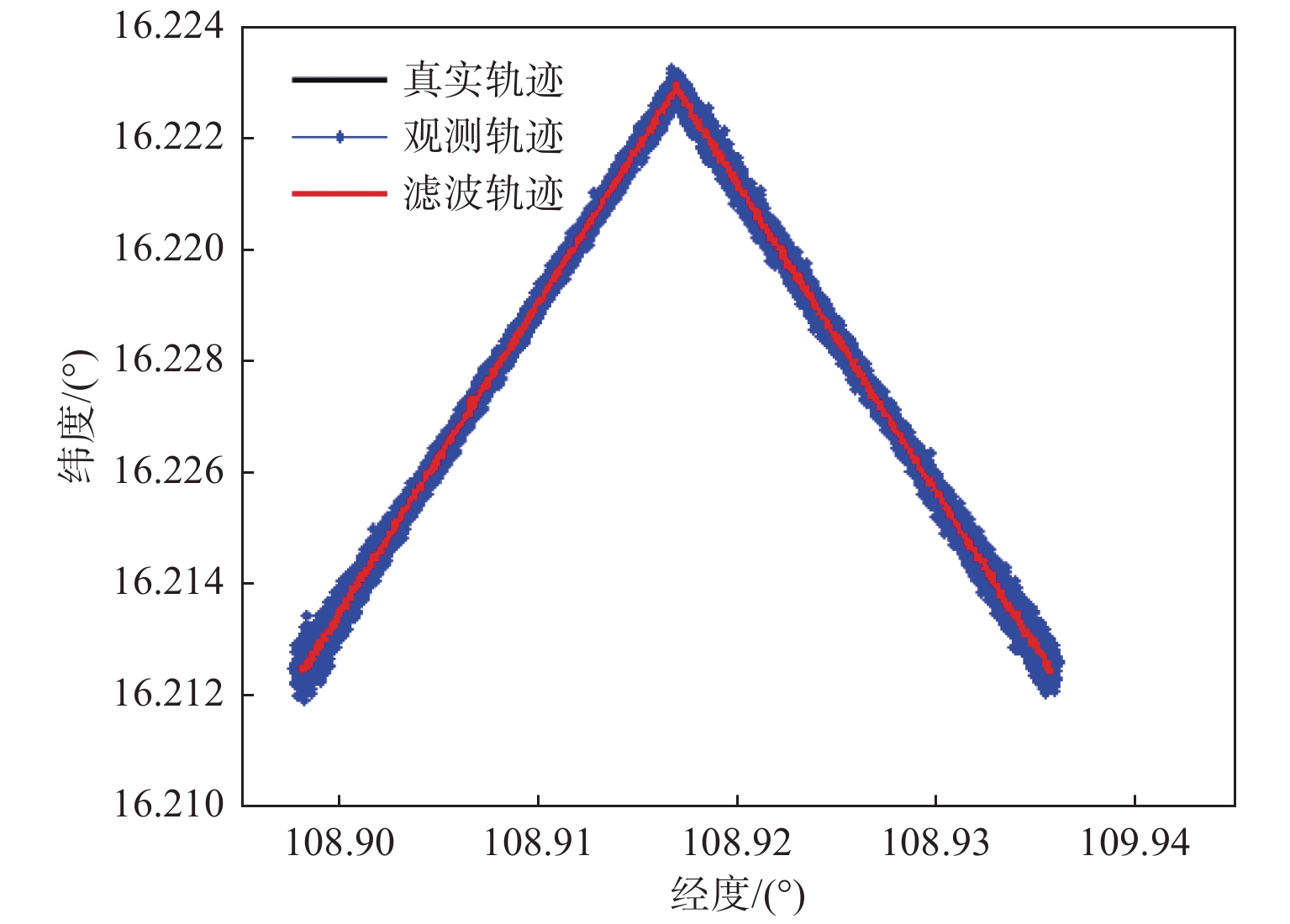
图 11. 目标折线运动的粒子滤波效果
Fig. 11. Particle filtering effect of target folded line motion
下载图片 查看原文
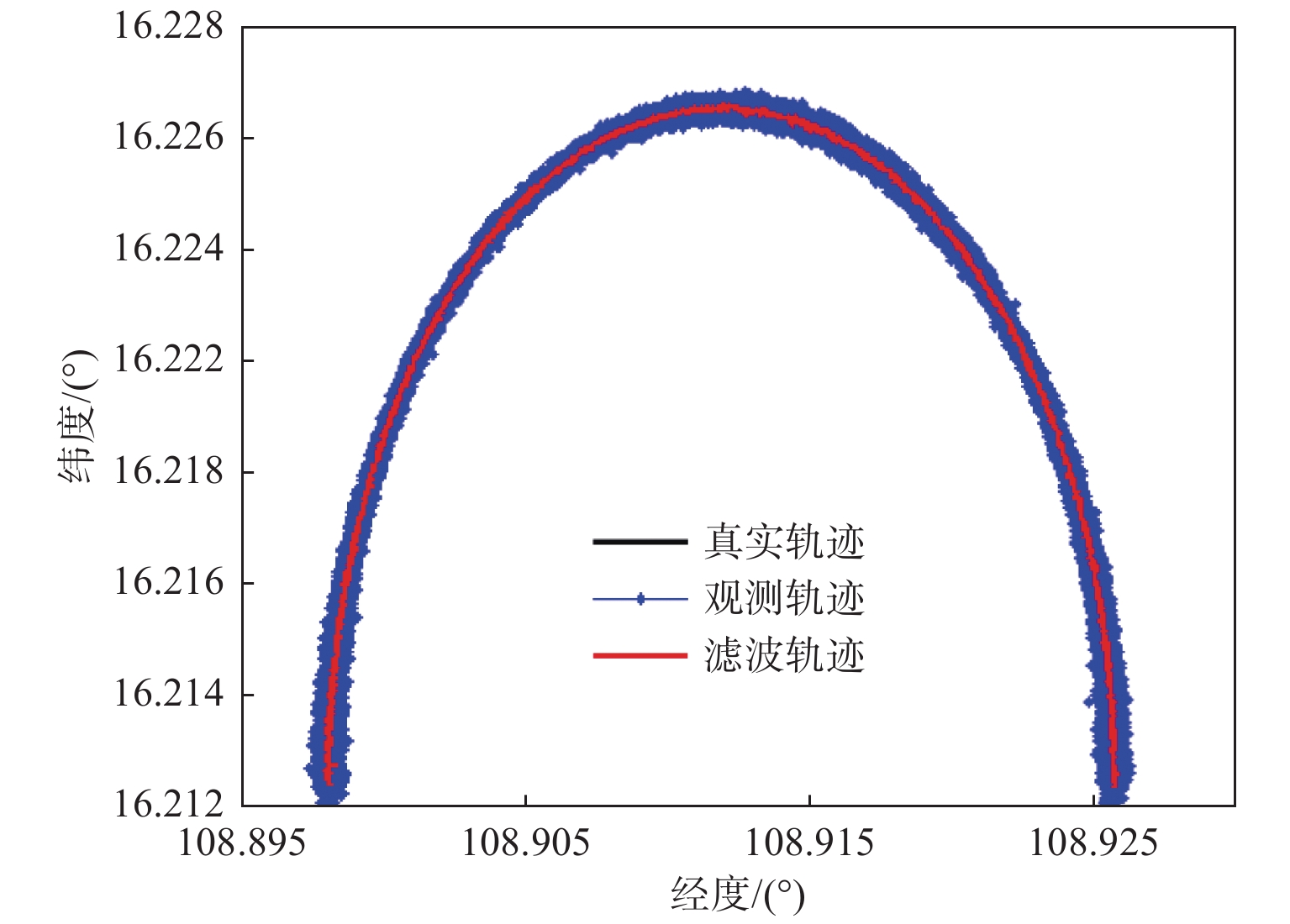
图 12. 目标弧线运动的粒子滤波效果
Fig. 12. Particle filtering effect of target arc motion
下载图片 查看原文
图 13. 目标基本静止的粒子滤波效果
Fig. 13. Particle filtering effect of target nearly stationary
下载图片 查看原文
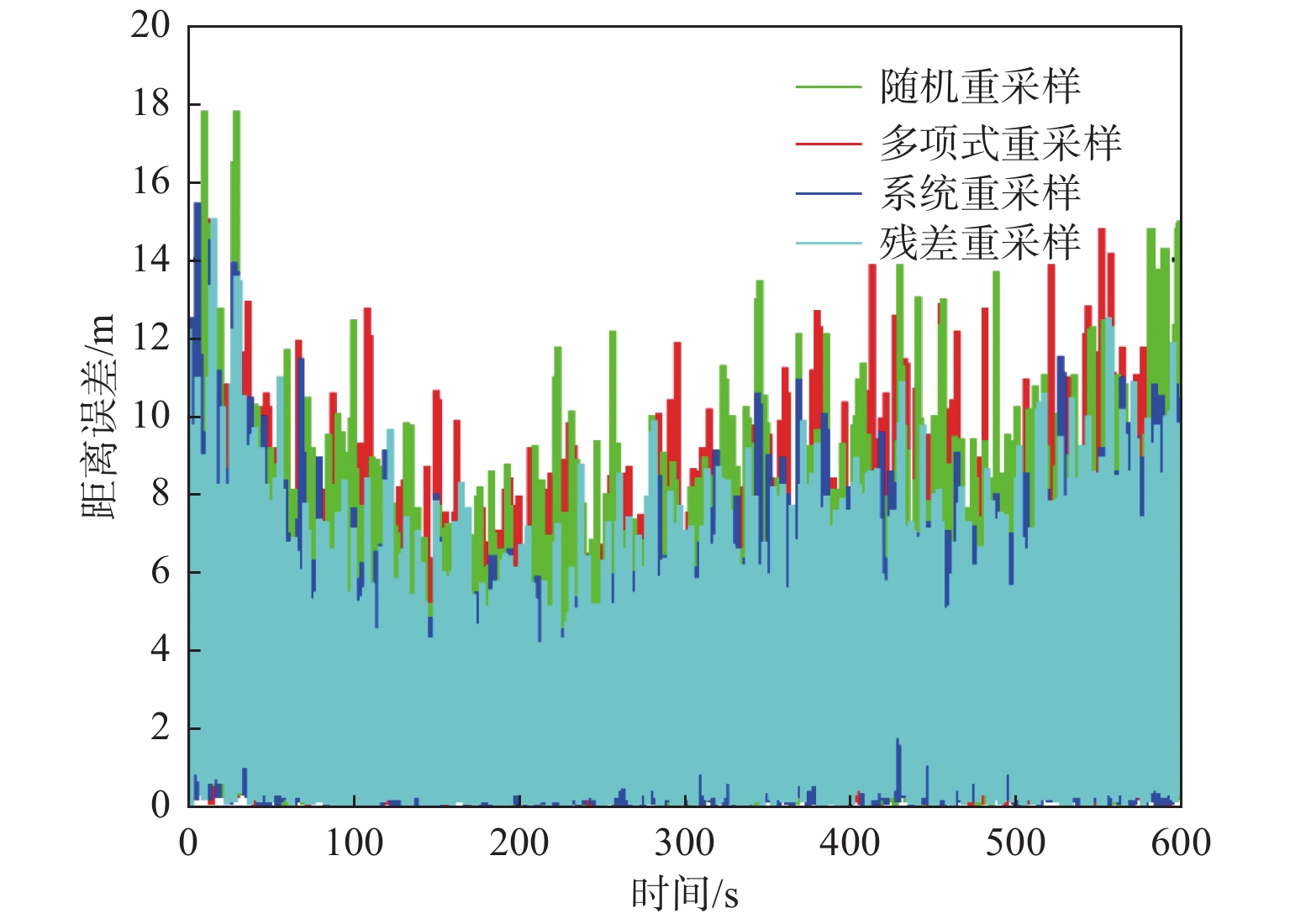
图 14. 重采样方法对滤波效果的影响
Fig. 14. Particle filtering effect of target nearly stationary
下载图片 查看原文
表 1误差源及其大小
Table1. Error source and its intensity
| 项目 | 指标(1σ) | | GPS | 位置测量精度/m | 5 | | INS | 航向测量精度/(°) | 0.07 | | 俯仰测量精度/(°) | 0.02 | | 横滚测量精度/(°) | 0.02 | | 转塔 | 视轴稳定精度/μrad | 30 | | 视频 | 横向像素偏差/像素 | 1 | | 纵向像素偏差/像素 | 1 |
|
查看原文
表 2海面运动目标无源定位及粒子滤波相关数据
Table2. Passive positioning and particle filter data of moving targets on the sea
| 时间/s | 载机(含噪) | | 转塔(含噪) | | 准确目标 | | 观测目标 | | 滤波目标 | | 经度180+/(°) | 纬度16+/(°) | 高度/
m
| 方位/
(°)
| 俯仰/
(°)
| 横滚/
(°)
| 方位/
(°)
| 俯仰/
(°)
| 经度180+/(°) | 纬度16+/(°) | 经度180+/(°) | 纬度16+/(°) | 经度180+/(°) | 纬度16+/(°) | | 注:目标初始位置:(108.898 063°, 16.212 541°);目标初始角速度:(6.361 9e−5°/s, 3.402 0e−5°/s)
Q: diag (1.351 2e−6°/s2, 1.463 4e−6°/s2); P: diag (6.748 7e−11°/s, 7.292 9e−11°/s);R: diag (1.459 1e−8°, 1.426 1e−8°)
| | 50 | .966 7 | .133 5 | 5 998 | −0.134 | −0.012 | 0.015 | | −38.028 | −27.870 | | .901 187 | .214 236 | | .901 110 | .214 133 | | .901 154 | .214 213 | | 100 | .966 7 | .183 4 | 6 003 | −0.058 | −0.033 | 0.018 | −61.565 | −38.382 | .904 318 | .215 972 | .904 387 | .215 882 | .904 303 | .215 984 | | 150 | .963 3 | .233 8 | 5 996 | −18.042 | −0.003 | 29.996 | −88.904 | −13.951 | .907 449 | .217 708 | .907 503 | .217 765 | .907 506 | .217 686 | | 200 | .930 9 | .272 8 | 5 995 | −61.438 | −0.018 | 29.978 | −96.241 | −13.906 | .910 580 | .219 444 | .910 594 | .219 482 | .910 541 | .219 428 | | 250 | .880 4 | .278 9 | 6 004 | −104.878 | −0.010 | 29.976 | −101.155 | −10.121 | .913 712 | .221 180 | .913 769 | .221 222 | .913 712 | .221 185 | | 300 | .839 7 | .248 7 | 6 001 | −148.346 | −0.014 | 30.020 | −100.511 | −5.138 | .916 843 | .222 915 | .916 858 | .223 136 | .916 844 | .222 871 | | 350 | .830 8 | .198 7 | 5 998 | 168.390 | 0.005 | 29.991 | −94.439 | −1.219 | .919 974 | .224 651 | .919 874 | .224 659 | .919 972 | .224 612 | | 400 | .858 7 | .156 3 | 5 999 | 124.989 | 0.010 | 29.99 | −84.309 | −0.243 | .923 105 | .226 387 | .923 063 | .226 476 | .923 054 | .226 390 | | 450 | .907 1 | .143 9 | 6 398 | 90.022 | 29.976 | 0.003 | −98.756 | −34.884 | .926 236 | .228 123 | .926 199 | .228 058 | .926 226 | .228 130 | | 500 | .957 6 | .143 9 | 7 000 | 90.037 | 0.015 | 0.006 | −107.623 | −35.069 | .929 368 | .229 859 | .929 389 | .229 846 | .929 322 | .229 901 |
|
查看原文
表 3不同噪声强度对滤波效果影响比较
Table3. Comparison of filtering effect with different noise intensities
| 序号 | 滤波前最大值/m | 滤波后最大值/m | 滤波后平均值/m | | 0 | 90.6 | 15.4 | 4.32 | | 1 | 175.8 | 32.0 | 7.18 | | 2 | 87.4 | 23.5 | 4.37 | | 3 | 149.6 | 34.6 | 7.12 |
|
查看原文
表 4初始参数估计对滤波结果影响比较
Table4. Comparison of filtering effect with different initial parameter estimations
| 项目 | 2倍 | | 5倍 | | 最大值/m | 平均值/m | 最大值/m | 平均值/m | | V | 20.0 | 4.35 | | 22.6 | 4.28 | | Q | 17.0 | 4.20 | 20.9 | 4.56 | | P | 19.4 | 4.42 | 18.5 | 4.31 | | R | 20.0 | 4.96 | 35.2 | 7.88 |
|
查看原文
秦川, 陶忠, 桑蔚, 张鹏, 海云波, 梅甫麟. 基于粒子滤波的运动目标光电定位仿真研究[J]. 应用光学, 2020, 41(1): 10. Chuan QIN, Zhong TAO, Wei SANG, Peng ZHANG, Yunbo HAI, Fulin MEI. Simulation on photoelectric positioning of moving targets based on particle filter[J]. Journal of Applied Optics, 2020, 41(1): 10.


 PDF全文
PDF全文
