海洋激光雷达的自适应深度提取算法  下载: 844次
下载: 844次
Adaptive Depth Extraction Algorithm for Ocean Lidar
1 中国科学院上海光学精密机械研究所空间激光信息传输与探测技术重点实验室, 上海 201800
2 中国科学院大学, 北京 100049
3 上海科技大学物质科学与技术学院, 上海 201210
4 南京大学中国南海研究协同创新中心, 江苏 南京 210023
5 中国海监南海航空支队, 广东 广州 510310
6 国家海洋局第二海洋研究所卫星海洋环境动力学国家重点实验室, 浙江 杭州 310012
图 & 表
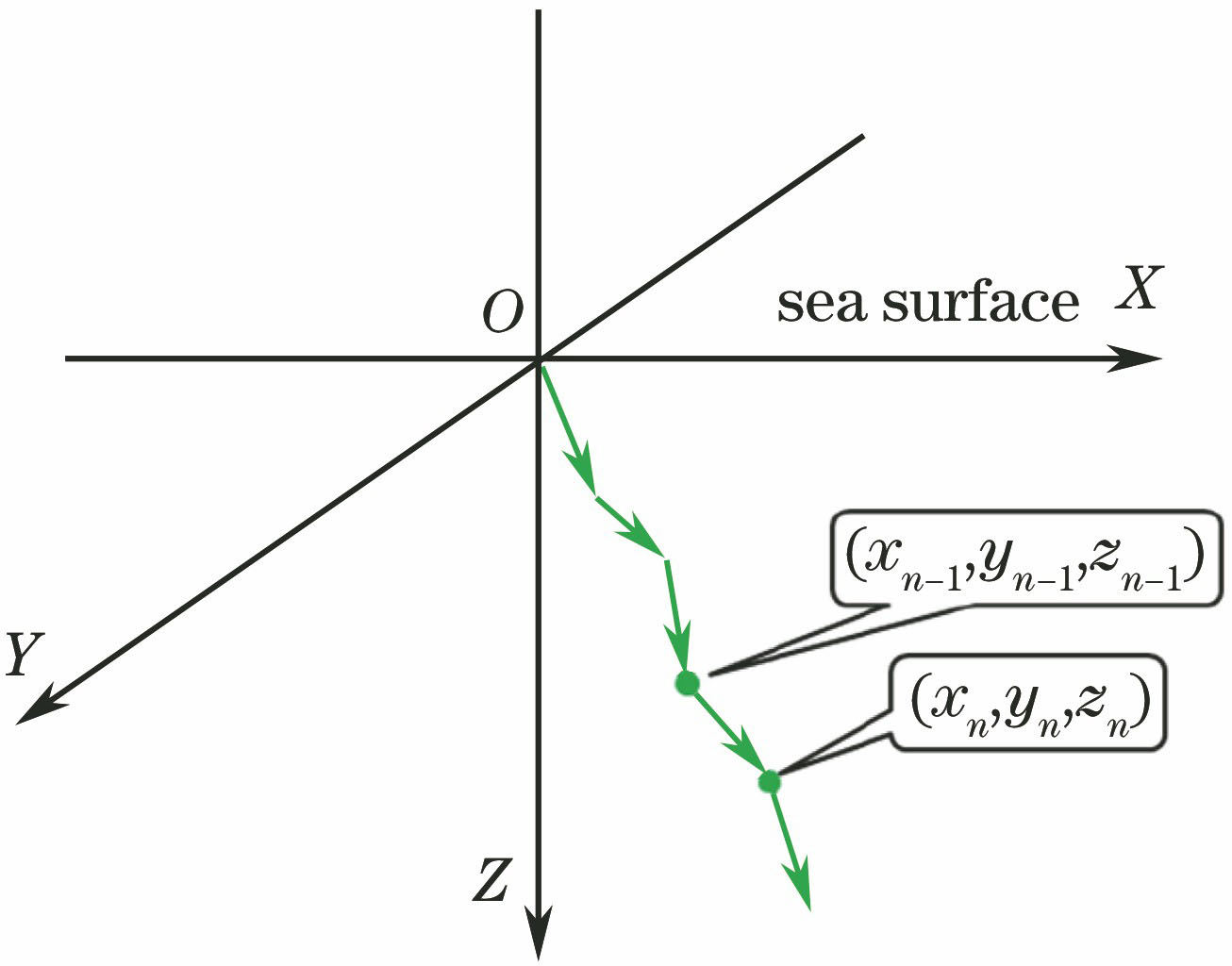
图 1. 光子包在水中传输并散射
Fig. 1. Transmission and scattering of photon packet
下载图片 查看原文
图 2. 蒙特卡罗算法流程图
Fig. 2. Flow chart of Monte Carlo algorithm
下载图片 查看原文
图 3. 机载双频激光雷达
Fig. 3. Airbone double frequency ocean lidar
下载图片 查看原文
图 4. 机载双频激光雷达系统扫描方式
Fig. 4. Scanning mode of LADMⅡ system
下载图片 查看原文
图 5. 海底回波能量与深度关系
Fig. 5. Relationship between energy and depth of echo wave
下载图片 查看原文
图 6. 海底回波脉冲宽度与深度关系
Fig. 6. Relationship between pulse width and depth of echo wave
下载图片 查看原文
图 7. 匹配滤波器
Fig. 7. Matched filtering
下载图片 查看原文
图 8. 不同深度深水区域匹配滤波算法与自适应深度提取算法结果。 (a) 33.22 m;(b) 33.64 m;(c) 34.57 m;(d) 33.67 m
Fig. 8. Results of matched filtering and adaptive depth extraction algorithm in deep area under different depths. (a) 33.22 m; (b) 33.64 m; (c) 34.57 m; (d) 33.67 m
下载图片 查看原文
图 9. 雷达回波深度统计
Fig. 9. Depth statistics of lidar data
下载图片 查看原文
图 10. 不同算法提取能力对比
Fig. 10. Comparison of extraction capacity with different methods
下载图片 查看原文
图 11. 测区点云图。 (a)固定匹配滤波算法;(b)自适应深度提取算法
Fig. 11. Point cloud of surveying area. (a) Fixed matching filtering algorithm; (b) adaptive depth extraction algorithm
下载图片 查看原文
图 12. 单波束声呐数据
Fig. 12. Single beam sonar data
下载图片 查看原文
图 13. 单波束声呐数据与雷达数据位置不匹配
Fig. 13. Location unmatch between single beam sonar data and lidar data
下载图片 查看原文
表 1机载双频激光雷达系统海洋模块参数
Table1. Parameters of airbone double frequency ocean modular
| Parameter | Value |
|---|
| Wavelength /nm | 532 | | Pulse width /ns | 2 | | Pulse energy /mJ | 3 | | Repetition rate /kHz | 1 | | Divergence angle /mrad | 0.2 | | Scanning mode | Ellipse | | Scanning angle /(°) | ±15 | | Sensor | PMT | | Aperture /mm | 200 | | Field of view /mrad | 40/6 |
|
查看原文
表 2蒙特卡罗仿真参数
Table2. Monte Carlo simulation parameters
| Parameter | Value |
|---|
| Wavelength /nm | 532 | | Pulse width /ns | 2 | | Pulse energy /mJ | 3 | | Divergence angle /mrad | 0.2 | | Sea water refractive index | 1.33 | | Air refractive index | 1 | | Attenuation coefficient | 0.54 | | Scattering coefficient | 0.43 | | Photon packet threshold | 1 | | Field of view /mrad | 40 | | Lidar height /m | 400 | | Asymmetric parameter | 0.924 |
|
查看原文
表 3精度分析
Table3. Accuracy analysis
| Depth /m | RMSE /m |
|---|
| 10-20 | 0.239 | | 20-30 | 0.258 | | >30 | 0.292 |
|
查看原文
表 4算法性能比较
Table4. Performance of different methods
| Method | Averagetime cost /s | RMSE /m | Successrate /% |
|---|
| Adaptive depthextraction | 0.006148 | 0.263 | 95.4 | | Deconvolution | 0.032564 | 0.227 | 95.3 |
|
查看原文
刘梦庚, 贺岩, 陈卫标, 王永星, 朱霞, 石先高, 黄田程, 张宇飞. 海洋激光雷达的自适应深度提取算法[J]. 中国激光, 2018, 45(10): 1010001. Liu Menggeng, He Yan, Chen Weibiao, Wang Yongxing, Zhu Xia, Shi Xiangao, Huang Tiancheng, Zhang Yufei. Adaptive Depth Extraction Algorithm for Ocean Lidar[J]. Chinese Journal of Lasers, 2018, 45(10): 1010001.
















 PDF全文
PDF全文

