中国激光, 2019, 46 (3): 0304004, 网络出版: 2019-05-09
基于流体驱动的水下激光自主扫描近程方位探测方法  下载: 735次
下载: 735次
Underwater Laser Autonomous Scanning Short-Range Azimuth Detection Method Based on Fluid-Driven
图 & 表
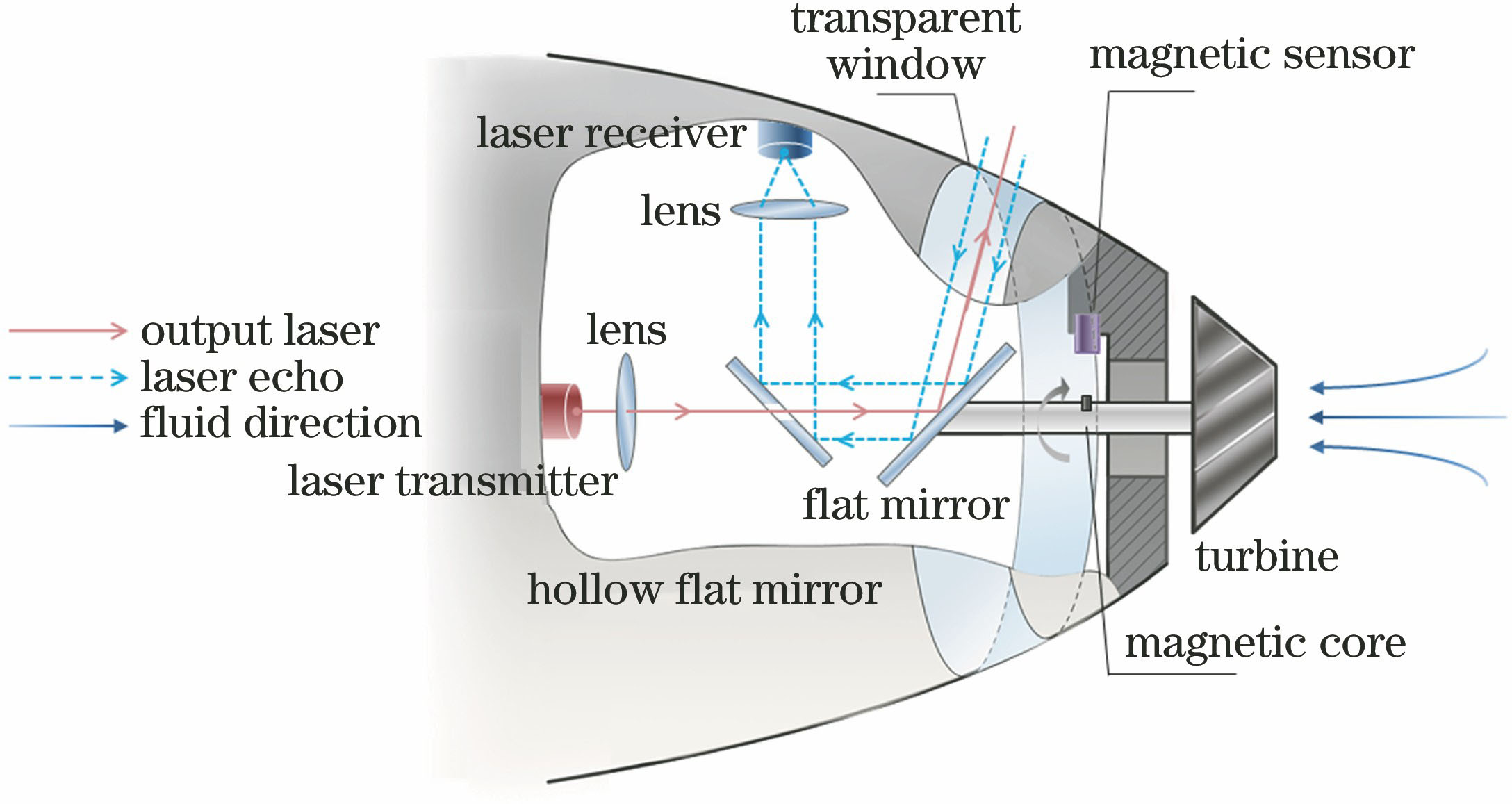
图 2. 流体驱动近程随机定位系统工作流程
Fig. 2. Workflow of fluid-driven short-range random positioning system



图 5. 不同激光发射功率时的(a)目标捕获率与(b)方位角测量概率分布
Fig. 5. (a) Target capture rate and (b) probability distribution of azimuth measurement with different laser emission powers

图 6. 不同激光发射脉宽时的激光回波信号
Fig. 6. Laser echo signals with different laser emission pulse widths

图 7. 不同激光发射脉宽时的(a)目标捕获率与(b)方位角测量概率分布
Fig. 7. (a) Target capture rate and (b) probability distribution of azimuth measurement with different laser emission pulse widths

图 8. 不同阈值电压时的(a)目标捕获率与(b)方位角测量概率分布
Fig. 8. (a) Target capture rate and (b) probability distribution of azimuth measurement with different threshold voltages


表 1理论仿真及实验参数
Table1. Theoretical simulation and experimental parameters
|
甘霖, 张合. 基于流体驱动的水下激光自主扫描近程方位探测方法[J]. 中国激光, 2019, 46(3): 0304004. Lin Gan, He Zhang. Underwater Laser Autonomous Scanning Short-Range Azimuth Detection Method Based on Fluid-Driven[J]. Chinese Journal of Lasers, 2019, 46(3): 0304004.




 PDF全文
PDF全文

