光栅投影三维测量系统中标定技术的研究  下载: 1259次
下载: 1259次
Calibration of Fringe Projection Three-Dimensional Measurement System
图 & 表
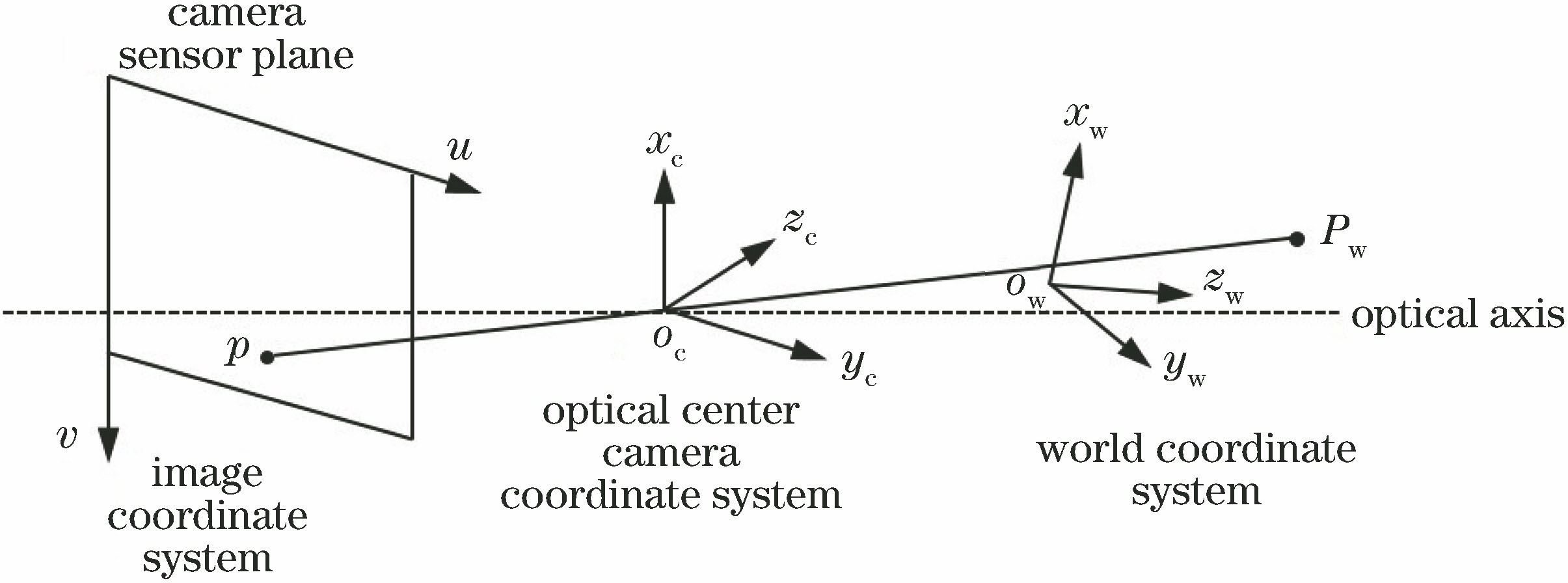
图 1. 针孔相机模型
Fig. 1. Pinhole camera model
下载图片 查看原文
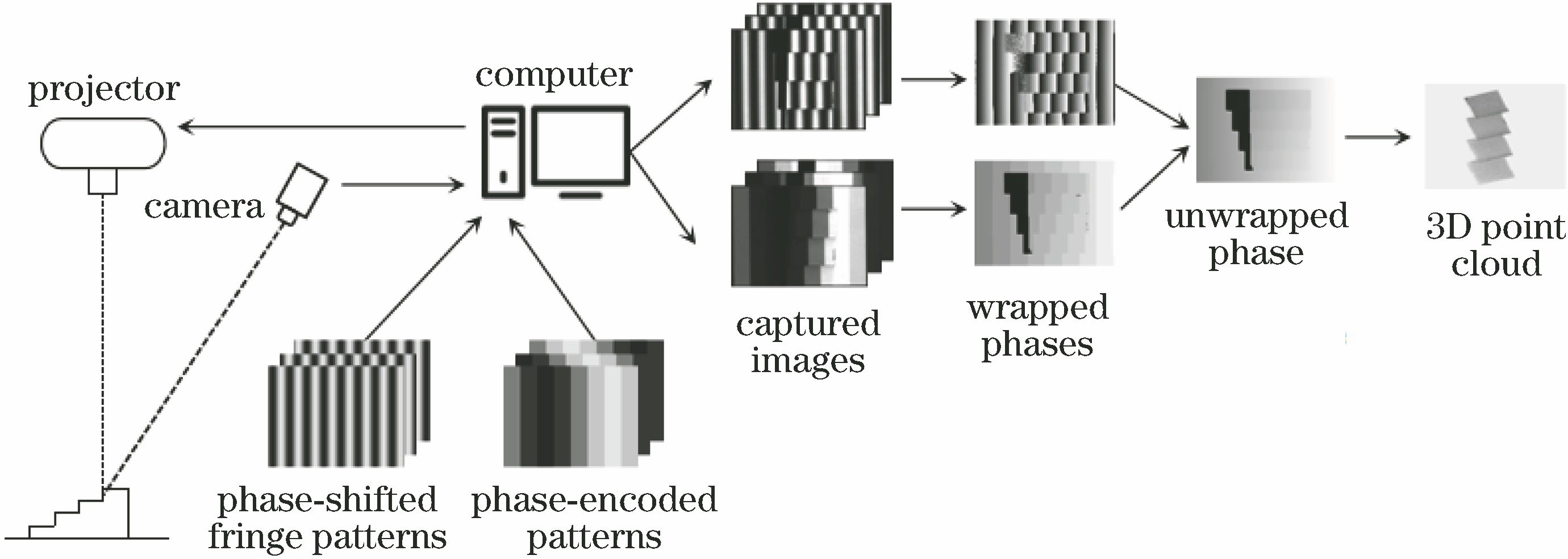
图 2. 光栅投影三维测量系统结构示意图
Fig. 2. Schematic of fringe projection 3D measurement system
下载图片 查看原文
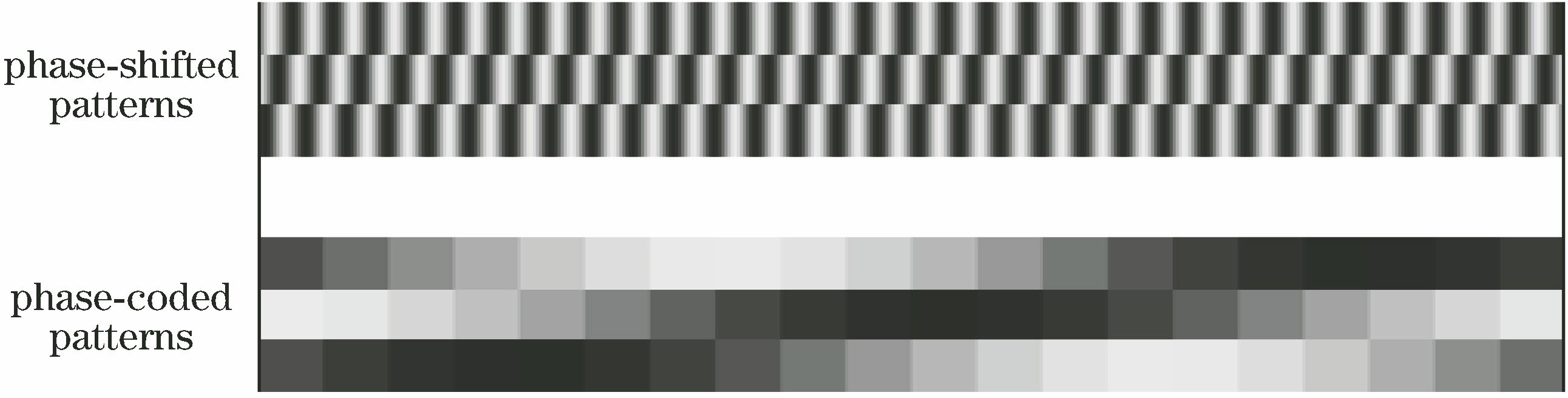
图 3. 光栅投影测量系统中使用的光栅图像
Fig. 3. Fringe patterns used in fringe projection measurement system
下载图片 查看原文
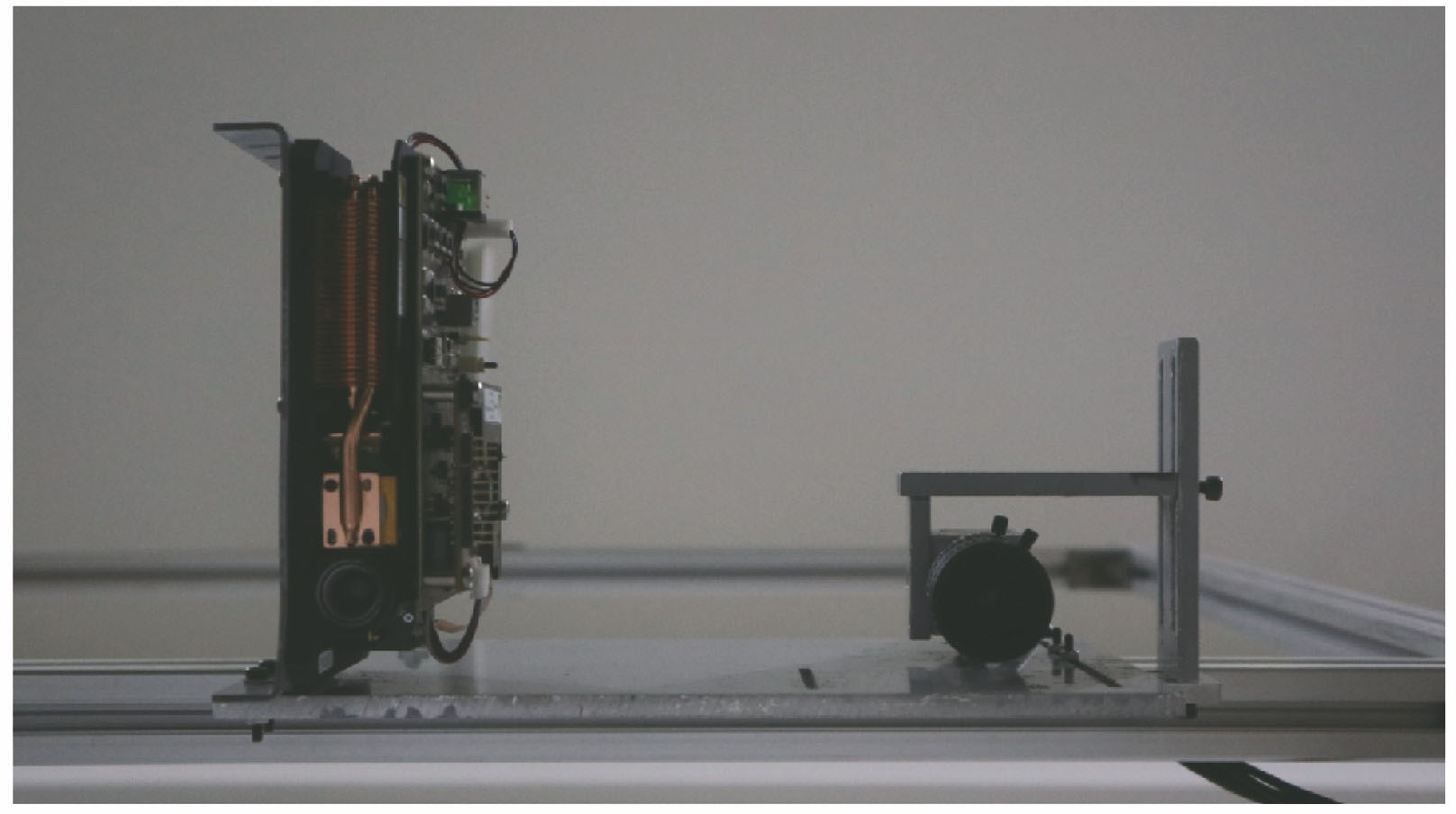
图 4. 光栅投影测量系统
Fig. 4. Fringe projection measurement system
下载图片 查看原文
图 5. 圆点标定板
Fig. 5. Dot calibration plate
下载图片 查看原文
图 6. 阶梯试块的三维测量。(a)本文方法测量结果;(b)文献[
10]方法测量结果
Fig. 6. 3D measurement of step block. (a) Measurement result of proposed method; (b) measurement result of Ref. [10]
下载图片 查看原文
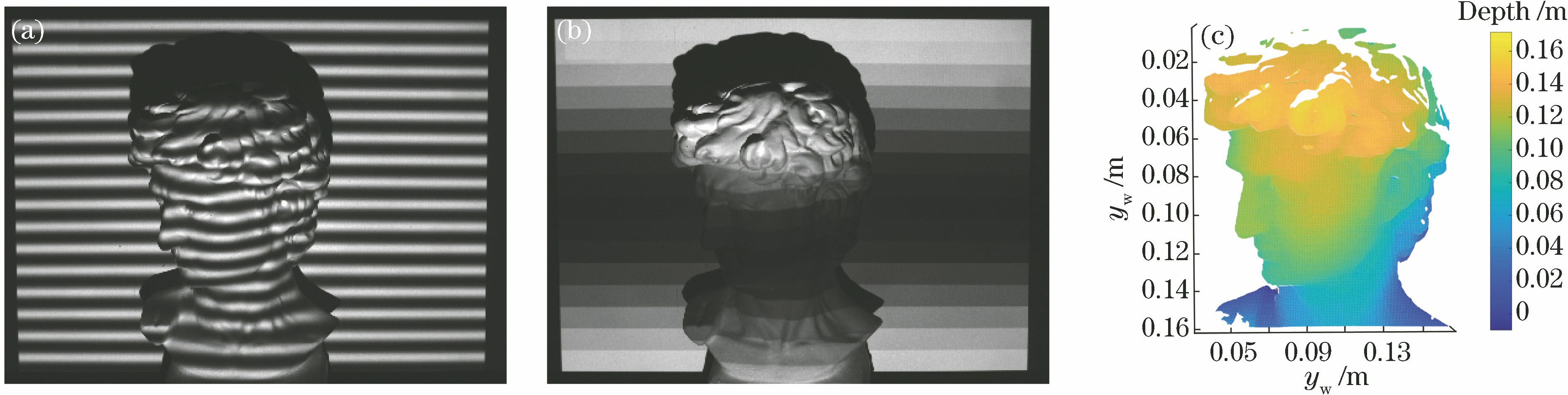
图 7. 复杂物体三维形状测量实例。(a)相移光栅图中的一幅;(b)相位编码图中的一幅;(c)三维形状重建图
Fig. 7. Example of 3D shape measurement of complex object. (a) One of phase-shifted fringe patterns; (b) one of phase-encoded patterns; (c) 3D reconstructed shape
下载图片 查看原文
表 1两种方法获得的三维测量系统的内参矩阵
Table1. Intrinsic parameter matrice of 3D measurement system obtained by two methods
| Method | Camera | Projector |
|---|
| Proposed method | | | | Method in Ref. [10] | | |
|
查看原文
表 2两种方法标定的畸变系数
Table2. Distortion coefficients calibrated by two methods
| Method | Device | Radial distortion coefficient |
|---|
| Proposed method | Camera | -0.1106 | 0.17976 | -0.0720 | | Projector | 0.1260 | -0.36680 | 0.2629 | | Method in Ref. [10] | Camera | -0.1542 | 0.21620 | -0.2499 | | Projector | 0.1377 | -0.40140 | 0.2716 |
|
查看原文
徐念, 武建伟, 魏小保. 光栅投影三维测量系统中标定技术的研究[J]. 激光与光电子学进展, 2020, 57(1): 011202. Nian Xu, Jianwei Wu, Xiaobao Wei. Calibration of Fringe Projection Three-Dimensional Measurement System[J]. Laser & Optoelectronics Progress, 2020, 57(1): 011202.





 PDF全文
PDF全文

