Chinese Optics Letters, 2016, 14 (9): 090602, Published Online: Aug. 3, 2018
Indoor imaging visible light positioning with sampled sparse light source and mobile device  Download: 1018次
Download: 1018次
Figures & Tables
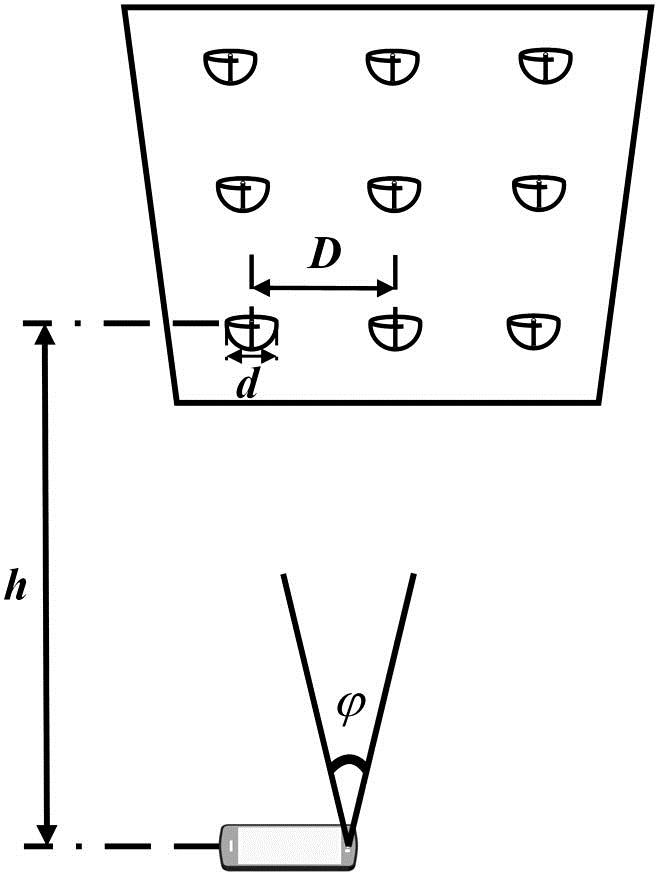
Fig. 2. (a) Positioning cellular and principle, (b) azimuth, roll, and pitch angle of mobile device.




Fig. 6. (a) Captured image at (0.8, 0.2, 0.2), (b) corresponding restructured image at (0.8, 0.2, 0.2).

Fig. 7. (a) 2D positioning errors with azimuth, roll, and pitch angles equal to 0°, (b) 3D positioning errors with azimuth, roll, and pitch angles equal to 0°.

Fig. 8. CDFs of positioning errors with (a) azimuth, roll and pitch angles equal 0°, (b) azimuth angle equals 270°, roll and pitch angles equal 0°.

Fig. 9. (a) 2D positioning errors with azimuth angle equal to 270°, roll, and pitch angles equal to 0°, (b) 3D positioning errors with azimuth angle equal to 270°, and roll and pitch angles equal to 0°.

Fig. 10. (a) 2D positioning errors with azimuth angle equal to 270°, and roll and pitch angle equal to 5°, (b) 3D positioning errors with azimuth angle equal to 270°, and roll and pitch angles equal to 5°.


Table1. Key Parameters of Positioning System.
|
Heqing Huang, Lihui Feng, Guoqiang Ni, Aiying Yang. Indoor imaging visible light positioning with sampled sparse light source and mobile device[J]. Chinese Optics Letters, 2016, 14(9): 090602.



 PDF全文
PDF全文

