基于改进旋转区域生成网络的遥感图像目标检测  下载: 2152次
下载: 2152次
Object Detection of Remote Sensing Image Based on Improved Rotation Region Proposal Network
图 & 表
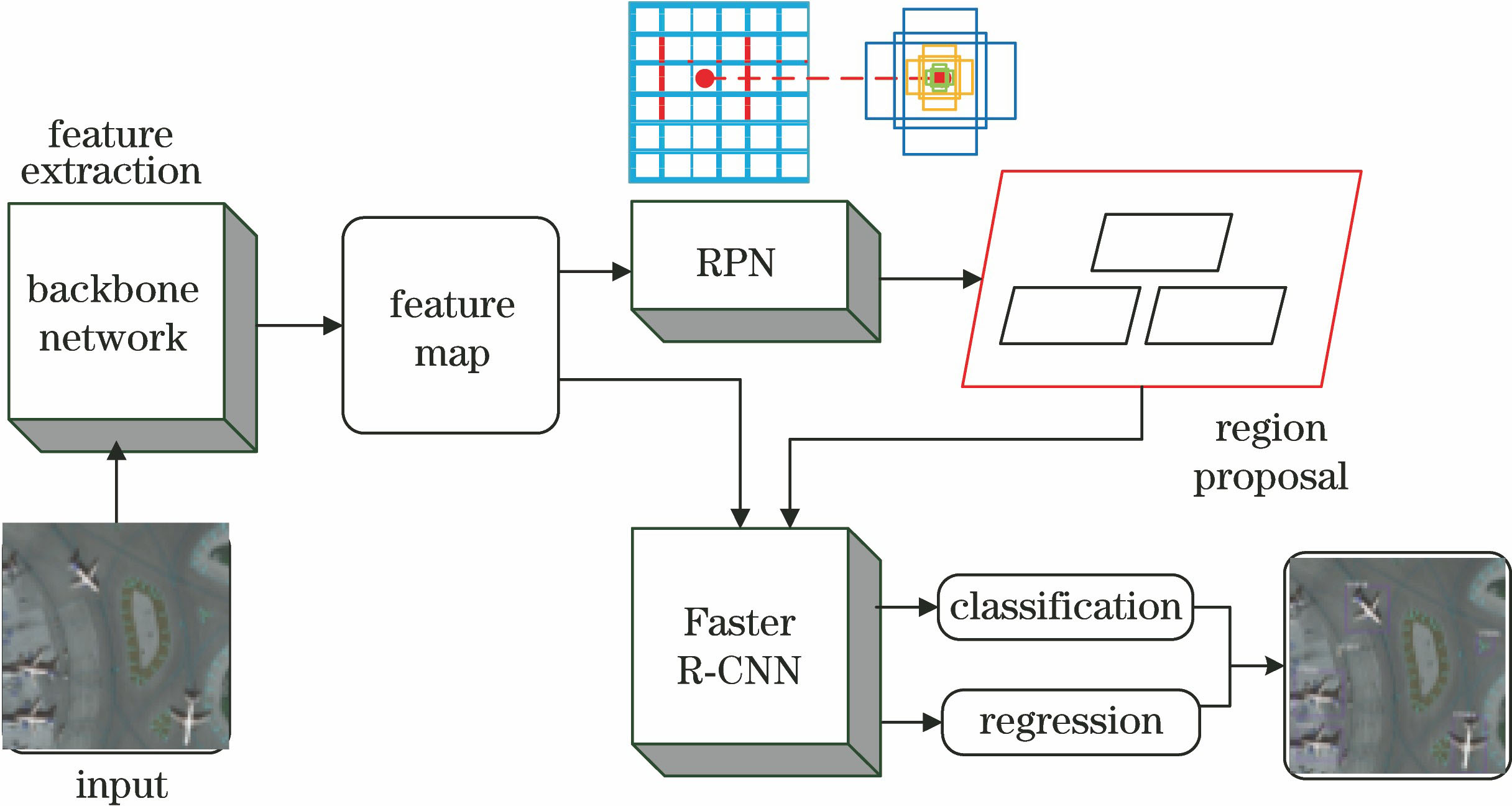
图 1. Faster R-CNN网络模型结构
Fig. 1. Structure of Faster R-CNN network model
下载图片 查看原文
图 2. 本文算法的网络结构
Fig. 2. Network structure of proposed algorithm
下载图片 查看原文
图 3. 多尺度特征提取示意图。(a) Faster R-CNN特征提取方法; (b)特征金字塔
Fig. 3. Diagram of multi-scale feature extraction. (a) Faster R-CNN feature extraction method; (b) feature pyramid
下载图片 查看原文
图 4. 本文使用的anchor策略。(a)重新设计的尺度; (b)特殊比例; (c)角度参数
Fig. 4. Anchor strategy in our method. (a) Redesigned scale; (b) special ratio; (c) angular parameters
下载图片 查看原文
图 5. 倾斜IoU的计算过程示意图。(a) 相交部分规则; (b) 相交部分不规则
Fig. 5. Calculation process of tilted IoU. (a) Regular intersection; (b) irregular intersection
下载图片 查看原文
图 6. 不同NMS检测结果的对比。(a)传统的NMS与普通框; (b)传统的NMS与旋转框; (c)倾斜的NMS与旋转框
Fig. 6. Comparison of results of different NMS detections. (a) Traditional NMS with common box; (b) traditional NMS with rotated box; (c) tilted NMS with rotated box
下载图片 查看原文
图 7. RoIPooling和RoIAlign。(a) RoIPooling; (b) RoIAlign
Fig. 7. RoIPooling and RoIAlign. (a) RoIPooling; (b) RoIAlign
下载图片 查看原文
图 8. 原始RRPN与改进方法的测试结果对比。(a)(c)原始RRPN; (b)(d) 改进方法
Fig. 8. Comparison of testing results between original RRPN and our method. (a)(c) Original RRPN; (b)(d) improved method
下载图片 查看原文
图 9. 不同算法对大型车辆的检测结果。(a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e)所提算法
Fig. 9. Detection results of different algorithms for large vehicle. (a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e) proposed algorithm
下载图片 查看原文
图 10. 不同算法对飞机的检测结果。(a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e)所提算法
Fig. 10. Detection results of different algorithms for airplane. (a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e) proposed algorithm
下载图片 查看原文
图 11. 不同算法对网球场的检测结果。(a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e)所提算法
Fig. 11. Detection results of different algorithms for tennis court. (a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e) proposed algorithm
下载图片 查看原文
图 12. 不同算法对船只的检测结果。(a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e)所提算法
Fig. 12. Detection results of different algorithms for ship. (a) YOLO v2; (b) YOLO v3; (c) Faster R-CNN; (d) RRPN; (e) proposed algorithm
下载图片 查看原文
表 1不同基础网络对典型目标的提取结果
Table1. Extraction results of different basic networks for typical object
| Network | AP /% |
|---|
| Plane | Ship | Bridge | Harbor | Storage-tank |
|---|
| VGG16 | 79.2 | 42.1 | 18.5 | 43.1 | 44.5 | | ResNet101+FPN | 82.1 | 44.3 | 21.6 | 45.3 | 47.4 |
|
查看原文
表 2不同RoI池化方法的检测效果对比
Table2. Comparison of detection effects of different RoI pooling methods
| Pooling method | AP /% |
|---|
| Bridge | Harbor | Storage-tank | Plane | Ship |
|---|
| RoIPooling | 21.6 | 45.3 | 47.4 | 82.1 | 44.3 | | RoIAlign | 23.9 | 47.0 | 48.5 | 83.8 | 47.4 |
|
查看原文
表 3不同分类网络对15种目标的检测效果
Table3. Detection results of different classification networks for 15 types of targets%
| Category | AP |
|---|
| Original | +Conv |
|---|
| Bridge | 23.9 | 27.5 | | Small-vehicle | 31.6 | 32.4 | | Baseball diamond | 67.6 | 67.3 | | Basketball court | 47.5 | 46.3 | | Harbor | 47.0 | 46.9 | | Ground-track field | 40.2 | 44.6 | | Soccer ball field | 41.2 | 42.4 | | Storage-tank | 48.5 | 48.5 | | Large-vehicle | 49.8 | 51.7 | | Plane | 83.8 | 84.1 | | Roundabout | 47.6 | 45.4 | | Tennis court | 89.4 | 88.8 | | Helicopter | 45.4 | 42.3 | | Ship | 47.4 | 47.4 | | Swimming pool | 39.8 | 38.1 | | mAP | 50.05 | 50.25 |
|
查看原文
表 4本文方法对15类目标的实验结果
Table4. Experimental results of proposed method for 15 types of targets%
| Category | Precision | Recall | AP |
|---|
| Bridge | 59.15 | 32.92 | 26.40 | | Small-vehicle | 68.65 | 44.12 | 34.10 | | Baseball diamond | 80.40 | 81.21 | 78.57 | | Basketball court | 82.01 | 76.20 | 73.20 | | Harbor | 77.95 | 61.41 | 56.00 | | Ground-track field | 81.29 | 60.05 | 55.62 | | Soccer ball field | 78.20 | 59.95 | 57.79 | | Storage-tank | 81.40 | 52.82 | 51.50 | | Large-vehicle | 62.68 | 76.20 | 56.91 | | Plane | 94.10 | 87.36 | 86.50 | | Roundabout | 75.52 | 60.67 | 56.05 | | Tennis court | 97.04 | 91.29 | 91.16 | | Helicopter | 82.05 | 65.31 | 61.88 | | Ship | 74.01 | 55.35 | 50.10 | | Swimming pool | 71.60 | 53.45 | 47.52 | | Average | 77.74 | 63.89 | 58.89 |
|
查看原文
表 5不同算法对15类目标的实验结果
Table5. Experimental results of different methods for 15 types of targets%
| Category | YOLO v2 | YOLO v3 | Faster R-CNN | RRPN | Proposed method |
|---|
| Bridge | 14.18 | 10.03 | 41.82 | 23.88 | 26.38 | | Small-vehicle | 13.08 | 14.79 | 3.85 | 34.65 | 34.15 | | Baseball diamond | 52.79 | 9.09 | 72.83 | 67.61 | 78.57 | | Basketball court | 42.43 | 2.27 | 55.81 | 47.48 | 73.21 | | Harbor | 51.99 | 17.07 | 59.04 | 47.30 | 56.18 | | Ground-track field | 32.57 | 4.81 | 84.68 | 40.19 | 55.64 | | Soccer ball field | 31.67 | 0.146 | 63.60 | 41.15 | 57.78 | | Storage-tank | 40.21 | 24.59 | 5.31 | 48.77 | 51.55 | | Large-vehicle | 22.02 | 9.09 | 38.94 | 49.74 | 56.91 | | Plane | 80.91 | 49.44 | 38.74 | 83.89 | 86.52 | | Roundabout | 44.40 | 21.64 | 44.44 | 47.61 | 56.06 | | Tennis court | 72.52 | 15.18 | 89.75 | 89.40 | 91.15 | | Helicopter | 21.22 | 0.02 | 40.64 | 45.44 | 61.91 | | Ship | 46.73 | 30.31 | 3.99 | 47.19 | 50.15 | | Swimming pool | 34.31 | 7.54 | 22.71 | 39.78 | 47.55 | | mAP | 39.87 | 14.40 | 44.41 | 50.08 | 58.91 |
|
查看原文
戴媛, 易本顺, 肖进胜, 雷俊锋, 童乐, 程志钦. 基于改进旋转区域生成网络的遥感图像目标检测[J]. 光学学报, 2020, 40(1): 0111020. Yuan Dai, Benshun Yi, Jinsheng Xiao, Junfeng Lei, Le Tong, Zhiqin Cheng. Object Detection of Remote Sensing Image Based on Improved Rotation Region Proposal Network[J]. Acta Optica Sinica, 2020, 40(1): 0111020.














 PDF全文
PDF全文

