激光与光电子学进展, 2020, 57 (21): 212805, 网络出版: 2020-10-24
基于无线紫外线通信的无人机集群防撞定位算法研究  下载: 886次
下载: 886次
Collision Avoidance Algorithm for Unmanned Aerial Vehicle Group Based on Wireless Ultraviolet Communication
图 & 表

图 2. 紫外线信标通信模型。(a)二维模型;(b)三维模型
Fig. 2. UV beacon communication model. (a) Two-dimensional model; (b) three-dimensional model
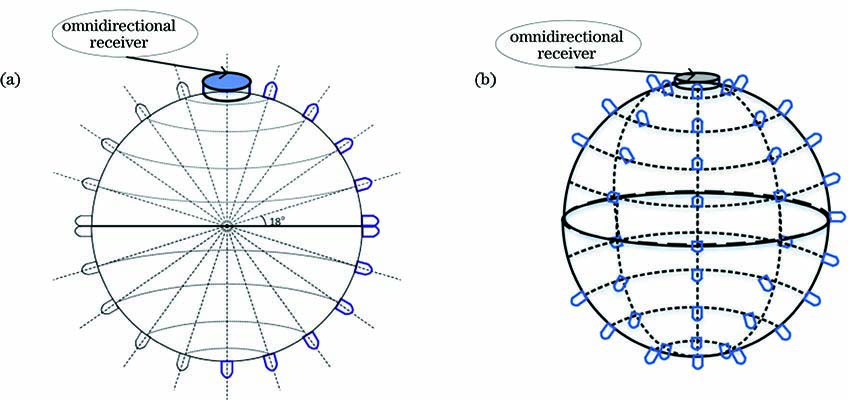
图 3. 无线紫外线信标节点在2D和3D空间中的通信覆盖范围。(a) 2D空间;(b) 3D空间
Fig. 3. Communication coverage of a wireless UV beacon node in two- and three-dimensional spaces. (a) Two-dimensional space; (b) three-dimensional space
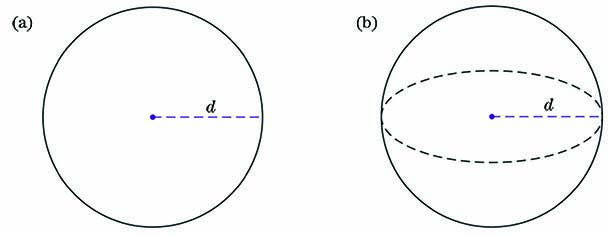

图 8. NLOS下不同发射和接收角度下的信号接收强度
Fig. 8. Received signal strength of different transmitting and receiving angles under NLOS
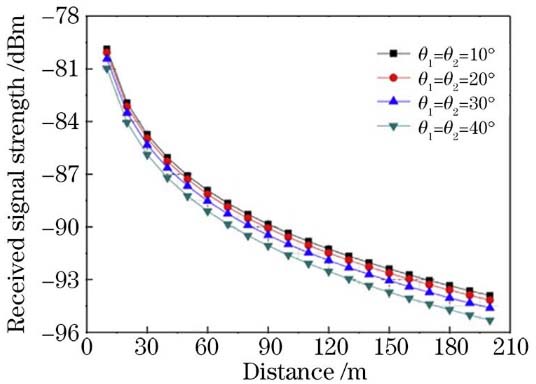
图 10. 2D和3D空间的定位结果。 (a) 2D空间;(b) 3D空间
Fig. 10. Positioning results of two- and three-dimensional spaces. (a) Two-dimensional space; (b) three-dimensional space
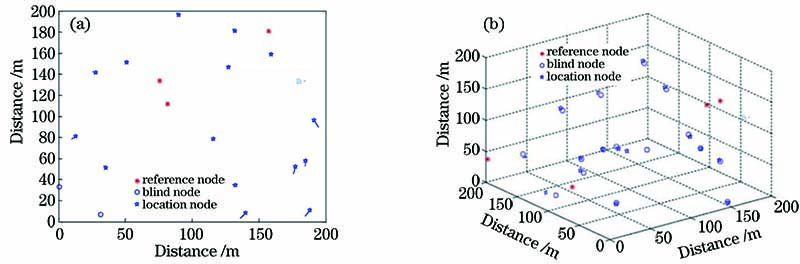
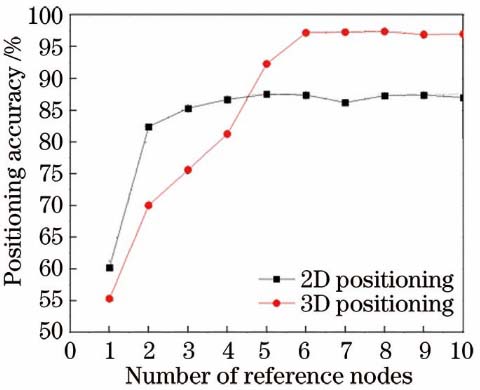
表 1系统模型参数
Table1. System model parameters
|
刘涛, 贾遂民. 基于无线紫外线通信的无人机集群防撞定位算法研究[J]. 激光与光电子学进展, 2020, 57(21): 212805. Liu Tao, Jia Suimin. Collision Avoidance Algorithm for Unmanned Aerial Vehicle Group Based on Wireless Ultraviolet Communication[J]. Laser & Optoelectronics Progress, 2020, 57(21): 212805.



 PDF全文
PDF全文

