激光与光电子学进展, 2020, 57 (24): 241020, 网络出版: 2020-11-18
基于边缘检测及可靠性排序算法的三维曲面重构  下载: 1154次
下载: 1154次
Three-Dimensional Surface Reconstruction Based on Edge Detection and Reliability Sorting Algorithm
图 & 表
图 1. 结构光3D重建系统的原理图
Fig. 1. Schematic diagram of the structured light 3D reconstruction system
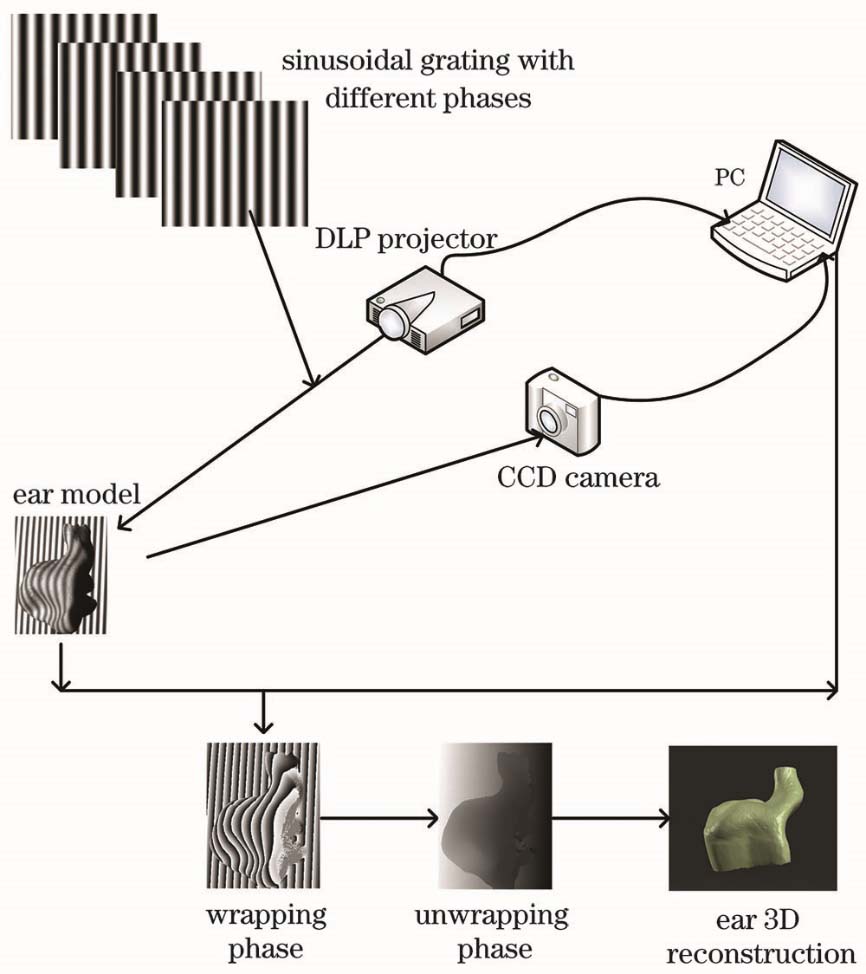

图 3. 相邻像素间的可靠性值。(a)单个像素的可靠性值;(b)展开路径的可靠性值
Fig. 3. Reliability value between adjacent pixels. (a) Reliability value of a single pixel; (b) reliability value of the expanded path

图 4. 可靠性排序的过程。(a)第一次; (b)第二次; (c)第三次; (d)第四次
Fig. 4. Process of reliability sequencing. (a) First time; (b) second time; (c) third time; (d) fourth time

图 5. 三种算子的边缘检测结果。(a) Laplacian算子;(b) LoG算子;(c) Canny算子
Fig. 5. Edge detection results of the three operators. (a) Laplacian operator; (b) LoG operator; (c) Canny operator

图 6. 边缘检测处理的过程。(a)丢失信息的耳蜗调制图;(b)经NMS处理后的图像;(c)经边缘处理后的图像
Fig. 6. Process of edge detection processing. (a) Ear modulation map with missing information; (b) image obtained after NMS processing; (c) image obtained after edge processing


图 8. 相位展开的误差分析。(a)相位函数的3D描述;(b)不同算法的相位展开误差
Fig. 8. Error analysis of phase unwrapping. (a) 3D description of the phase function; (b) phase unwrapping errors of different algorithms

图 9. 本算法在不同环境下的相位展开结果。(a)理想情况;(b)随机噪声;(c)信息丢失;(d)随机噪声和信息丢失
Fig. 9. Phase unwrapping results of our algorithm in different environments. (a) Ideal situation; (b) random noise; (c) information loss; (d) random noise and information loss


图 11. 光栅展开后的图像和耳蜗模型调制图。(a)光栅相位的展开图像;(b)耳蜗模型的调制光栅图
Fig. 11. Image and ear model modulation after the raster is expanded. (a) Unfolded image of grating phase; (b) modulated grating image of ear model

图 12. Goldstein枝切法得到的结果。(a)耳蜗模型的2D图;(b)相位展开后的耳蜗模型;(c)耳蜗模型的真实高度
Fig. 12. Results obtained by the Goldstein branch cutting method. (a) 2D image of the ear model; (b) ear model after phase expansion; (c) true height of the ear model

图 13. 两种算法的包裹相位和相位展开图。(a)~(b)最小二乘法;(c)~(d)本算法
Fig. 13. Wrapping phase and phase unfolding diagrams of the two algorithms. (a)-(b) Least square method; (c)-(d) our algorithm

图 14. 两种算法的相位展开结果。(a)最小二乘法(2D);(b)本算法(2D);(c)最小二乘法(3D);(d)本算法(3D)
Fig. 14. Phase unwrapping results of the two algorithms. (a) Least squares algorithm (2D); (b) our algorithm (2D); (c) least squares algorithm (3D); (d) our algorithm (3D)


表 1不同环境下本算法相位展开的时间
Table1. Phase unfolding time of our algorithm in different environments unit: s
|
虞梓豪, 刘瑾, 杨海马, 张鹏程, 陈毅. 基于边缘检测及可靠性排序算法的三维曲面重构[J]. 激光与光电子学进展, 2020, 57(24): 241020. Zihao Yu, Jin Liu, Haima Yang, Pengcheng Zhang, Yi Chen. Three-Dimensional Surface Reconstruction Based on Edge Detection and Reliability Sorting Algorithm[J]. Laser & Optoelectronics Progress, 2020, 57(24): 241020.




 PDF全文
PDF全文

