安防激光雷达研究进展  下载: 1489次
下载: 1489次
Research Progress on Security LiDAR
1 中国科学院微电子研究所,北京 100029
2 中国科学院大学,北京 100049
图 & 表
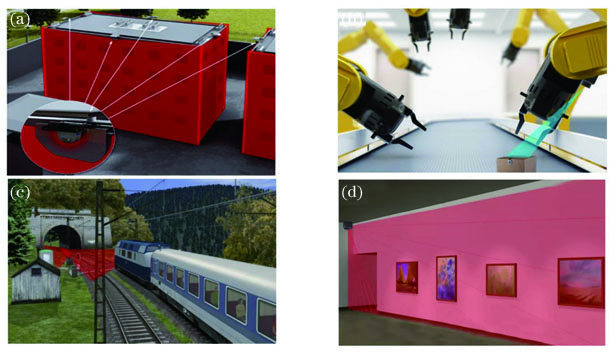
图 1. 应用场景。(a)周界防护[9];(b)工业监控[10];(c)入侵预警[11];(d)文物保护[12]
Fig. 1. Application scenarios. (a) Perimeter protection[9]; (b) industrial monitoring[10]; (c) intrusion warning[11]; (d) cultural relic protection[12]
下载图片 查看原文
图 2. 森林场景下无人机搭载安防激光雷达探测入侵目标[15]
Fig. 2. Drones equipped with security LiDAR for detecting intrusion target in forest scenario[15]
下载图片 查看原文
图 6. 传统机械式雷达的工作原理[21]
Fig. 6. Working principle of traditional mechanical LiDAR[21]
下载图片 查看原文
图 7. SICK安全激光扫描仪系列[22]
Fig. 7. SICK safety laser scanner series[22]
下载图片 查看原文
图 8. MEMS原理图。(a) MEMS激光雷达的工作原理[24];(b) MEMS扫描镜[25]
Fig. 8. Schematic of MEMS. (a) Working principle of MEMS LiDAR[24]; (b) MEMS scanning mirror[25]
下载图片 查看原文
图 9. Flash激光雷达的工作原理[21]
Fig. 9. Working principle of Flash LiDAR[21]
下载图片 查看原文
图 10. Flash激光雷达的工作场景及实验结果[31]。(a)在电子计算机上进行实时跟踪并在云台上安装Flash激光雷达进行实验设置;(b)场景点云;(c)标有人物中心的场景强度视图;(d)标有人物中心的场景范围视图
Fig. 10. Working scenario and experimental results of Flash LiDAR[31]. (a) Experimental setup with real-time tracking on PC and Flash LiDAR on pan-tilt head; (b) point cloud of scenario; (c) intensity view of scenario with person marked center; (d) range view of scenario with person marked center
下载图片 查看原文
图 11. OPA工作原理[33]
Fig. 11. Working principle of OPA[33]
下载图片 查看原文
图 12. Quanergy S3激光雷达原理[34]
Fig. 12. Working principle of Quanergy S3 LiDAR[34]
下载图片 查看原文
图 13. 最大允许曝光量与波长的关系[35]
Fig. 13. Relationship between maximum permissible exposure and wavelength[35]
下载图片 查看原文
图 14. 小型化激光雷达。(a) RealSense L515[40]; (b) SICK安全激光雷达nanoScan3[41]
Fig. 14. Miniaturized LiDAR. (a) RealSense L515[40]; (b) SICK safety LiDAR nanoScan3[41]
下载图片 查看原文
图 15. 全差分主放大器芯片显微图[42]
Fig. 15. Micrograph of fully differential main amplifier chip[42]
下载图片 查看原文
图 16. FMCW激光雷达工作流程图[44]
Fig. 16. Working flow chart of FMCW LiDAR[44]
下载图片 查看原文
图 17. 相干固态激光雷达的工作原理图[45]。(a)可发射和接收光学相控阵的固态激光雷达系统的原理图;(b)硬币顶部放置激光雷达系统芯片
Fig. 17. Working principle of coherent LiDAR[45]. (a) Schematic of solid-state LiDAR system with transmittable and receivable optical phased array; (b) chip containing LiDAR system on top of dime
下载图片 查看原文
图 18. 安防系统设备图[50]。(a) Optosafe Opto-Q-Guard 系统;(b)电子设备监控
Fig. 18. Equipment diagram of security system[50]. (a) Optosafe Opto-Q-Guard system; (b) electronic equipment monitoring
下载图片 查看原文
图 19. 安防机器人。(a)装载激光雷达的智能巡检机器人[52];(b) Orby-One跟踪机器人[53]
Fig. 19. Security robots. (a) Intelligent inspection robot equipped with LiDAR[52]; (b) Orby-One tracking robot[53]
下载图片 查看原文
表 1不同安防场景下的探测目标
Table1. Detecting targets in different security scenarios
| Security scenario | Dectect object |
|---|
| Perimeter protection | People, animal, and weapon | | Traffic control | People, car, animal, and rolling stone | | Cultural relic protection | People | | Airborne intrusion warning | UAV, bird, and people |
|
查看原文
表 2传统激光雷达产品的指标
Table2. Product indicators of traditional security LiDAR
| Company | Product model | Accuracy /mm | Angular resolution /(°) | Mass /kg | Size /(mm×mm×mm) | Cost /USD |
|---|
| Riegl | VZ-400i | 5 | 0.0007 (horizontal) and0.0005 (vertical) | 9.7 | 206×206×308 | Over 105 | | Optech | Galaxy T2000 | 8 | | 27 | 340×340×250 | Over 106 | | Leica | ScanStation P50 | 3 | 0.0022 | 12.5 | 238×358×395 | 115240 | | Trimble | Trimble GX | 7 | 0.003 (horizontal) and0.004 (vertical) | 13 | 323×343×404 | 183300 |
|
查看原文
表 3国外主流安防激光雷达产品的指标[16-18]
Table3. Product indicators of foreign mainstream security LiDAR[16-18]
| Company | Technological regime | Product model | Maximum measurement distance /m | Field of view /(°) | Mass /kg | Wavelength /nm | Cost /USD |
|---|
| SICK | Mechanical | outdoorScan3 | 4 | 275 | 1.15 | 850 | 4834 | | nanoScan3 | 3 | 275 | 0.67 | 905 | | | TiM-S | 25 | 270 | 0.25 | 850 | | | S300 | 3 | 270 | 1.20 | 905 | 2437 | | S3000 | 7 | 190 | 3.30 | 905 | 4500 | | TiM1xx | 10 | 200 | 0.09 | 850 | 782 | | HOKUYO | Mechanical | UAM-05LP | 20 | 270 | 0.80 | 905 | 1200 | | UTM-30LX | 60 | 270 | 0.37 | 905 | 4800 | | UXM-30LX | 30 | 190 | 0.80 | 905 | 4800 | | UST-10LX | 30 | 270 | 0.13 | 905 | 1600 | | YVT-35LX | 35 (horizontal) and 14(vertical) | 210(horizontal) and40(vertical) | 0.65 | 905 | 7500 | | Quanergy | Mechanical | M8 | 300@ρ=80% | 360(horizontal) and20(vertical) | 1.0 | 905 | 5000 | | OPA | S3-1 | 150@ρ=80% | 120(horizontal) and10(vertical) | 0.5 | 905 | 250 | | Ouster | Flash | OS0-32 | 55 | 95(vertical) | 0.445 | 850 | 6000 | | OS1-32 | 120 | 45(vertical) | 0.445 | 850 | 8000 | | OS2-32 | 240 | 25(vertical) | 0.930 | 850 | 16000 |
|
查看原文
表 4国内主流安防激光雷达产品的指标[19]
Table4. Product indicators of domestic mainstream security LiDAR[19]
| Company | Technological regime | Product model | Maximum measurement distance /m | Field of view /(°) | Mass /kg | Wavelength /nm | Cost /USD |
|---|
| Galaxy electronic | Mechanical | GL-11xx | 30@ρ=10% | 270 | 1.80 | 905 | | | GL-21xx | 20@ρ=10% | 180 | 1.00 | 905 | | | GL-41xx | 260@ρ=10% | 100 | 14.00 | 905 | | | GL-52xx | 10@ρ=10% | 300 | 0.75 | 905 | | | LiShen inelligent system | Mechanical | CX16-151C | 150@ρ=30% | 360(horizontal) and20(vertical) | 0.87 | 905 | 2800 | | CX32-151A | 150@ρ=30% | 360(horizontal) and31(vertical) | 1.50 | 905 | 8500 | | MEMS | LS20C | 200 | 120(horizontal) and20(vertical) | | 905 | 1500 | | LS21A | Over 200 | 60 (horizontal) and20(vertical) | | 1550 | 1500 | | Benewake | Mechanical | TF02 | 22@ρ=90% | 3.0 | 0.052 | 905 | 162 | | TF03 | 180@ρ=90% | 0.5 | 0.077 | 905 | 229 | | Flash | CE03-D | 28@ρ=90% | 240.0 | 0.356 | 850 | 1500 | | Lorentech | Flash | IT series | 80@ρ=80% | 60(horizontal) and45(vertical) | 0.62 | 850 | | | IG series | 40@ρ=80% | 60(horizontal) and30(vertical) | 0.38 | 850 | | | IM series | 20@ρ=80% | 30(horizontal) and20(vertical) | 0.30 | 850 | |
|
查看原文
表 5三种测距方案的对比
Table5. Comparison of three ranging schemes
| Scheme | Measurement distance | Accuracy | Anti-interference | Power | Cost |
|---|
| TOF | Best | Worst | Worst | Worst | High | | AMCW | Worst | Better | Better | Better | Medium | | FMCW | Better | Best | Best | Best | High |
|
查看原文
表 6四种扫描方式的对比
Table6. Comparison of four scanning schemes
| Scanning scheme | Measurement distance | Accuracy | Cost | Size | Technological readiness level | Stability |
|---|
| Mechanical | Better | Better | High | Worst | Best | Worst | | MEMS | Worst | Worst | Medium | Better | Better | Better | | Flash | Worst | Worst | Low | Better | Better | Better | | OPA | Worst | Worst | Low | Better | Worst | - |
|
查看原文
表 7三种激光雷达光源的对比
Table7. Comparison of three light sources for LiDAR
| Wavelength | Anti-interference | Eye- safety | Hype cycle | Cost |
|---|
| 850 nm | Better | Worst | Worst | Better | | 950 nm | Better | Worst | Better | Better | | 1550 nm | Worst | Better | Worst | Worst |
|
查看原文
宋召奇, 朱精果, 解天鹏, 李锋, 姜成昊, 郭文举, 王春晓, 蒋衍. 安防激光雷达研究进展[J]. 激光与光电子学进展, 2021, 58(1): 0100002. Song Zhaoqi, Zhu Jingguo, Xie Tianpeng, Li Feng, Jiang Chenghao, Guo Wenju, Wang Chunxiao, Jiang Yan. Research Progress on Security LiDAR[J]. Laser & Optoelectronics Progress, 2021, 58(1): 0100002.


















 PDF全文
PDF全文

