光学学报, 2021, 41 (4): 0401004, 网络出版: 2021-02-25
基于独立元分析的水下激光雷达后向散射噪声去除方法  下载: 1115次
下载: 1115次
Elimination of Backscatter Noise of Underwater LiDAR Using Independent Component Analysis Algorithm
图 & 表

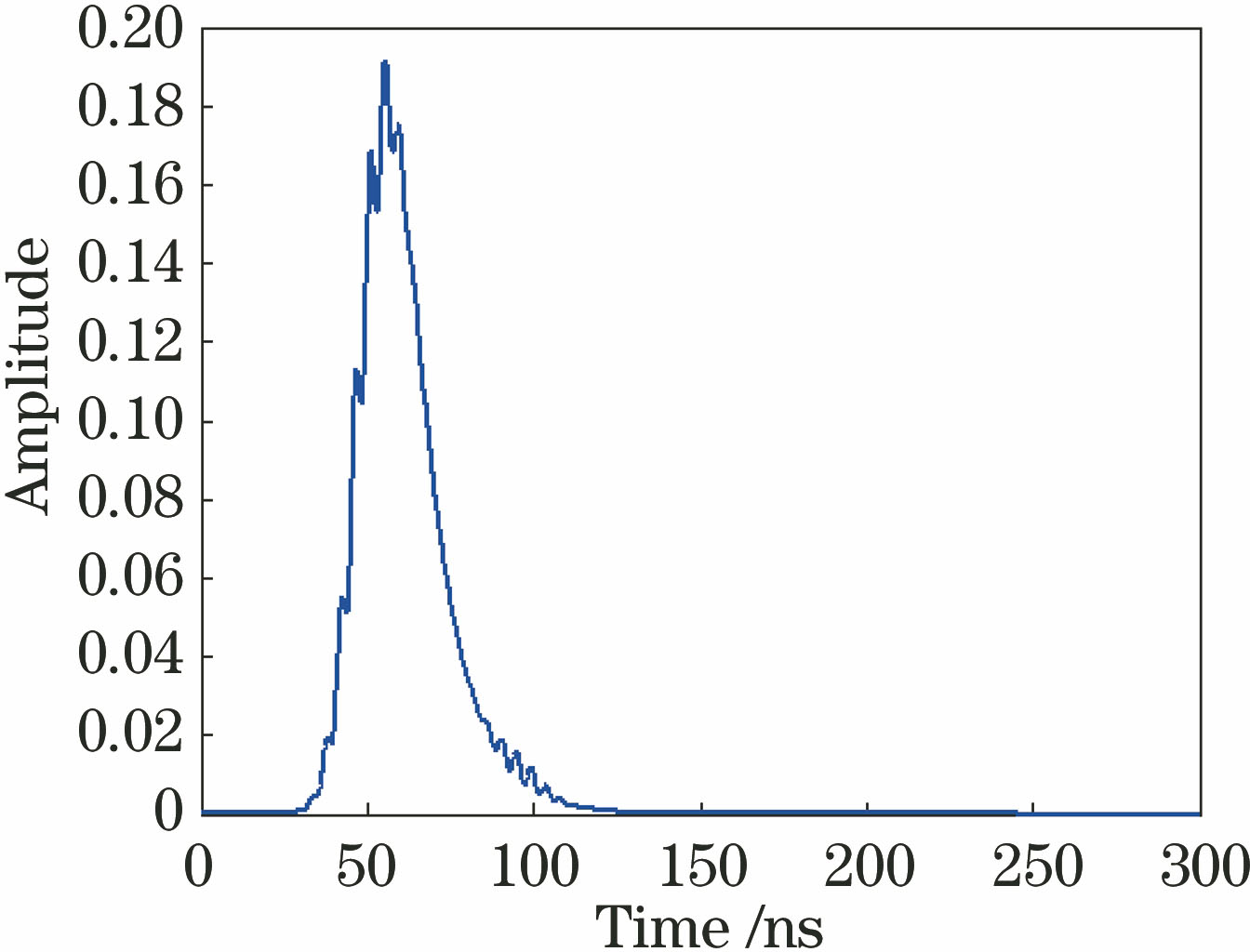
图 3. 调制频率为225 MHz与675 MHz的激光雷达回波信号
Fig. 3. Received signals at modulation frequency of 225 MHz and 675 MHz
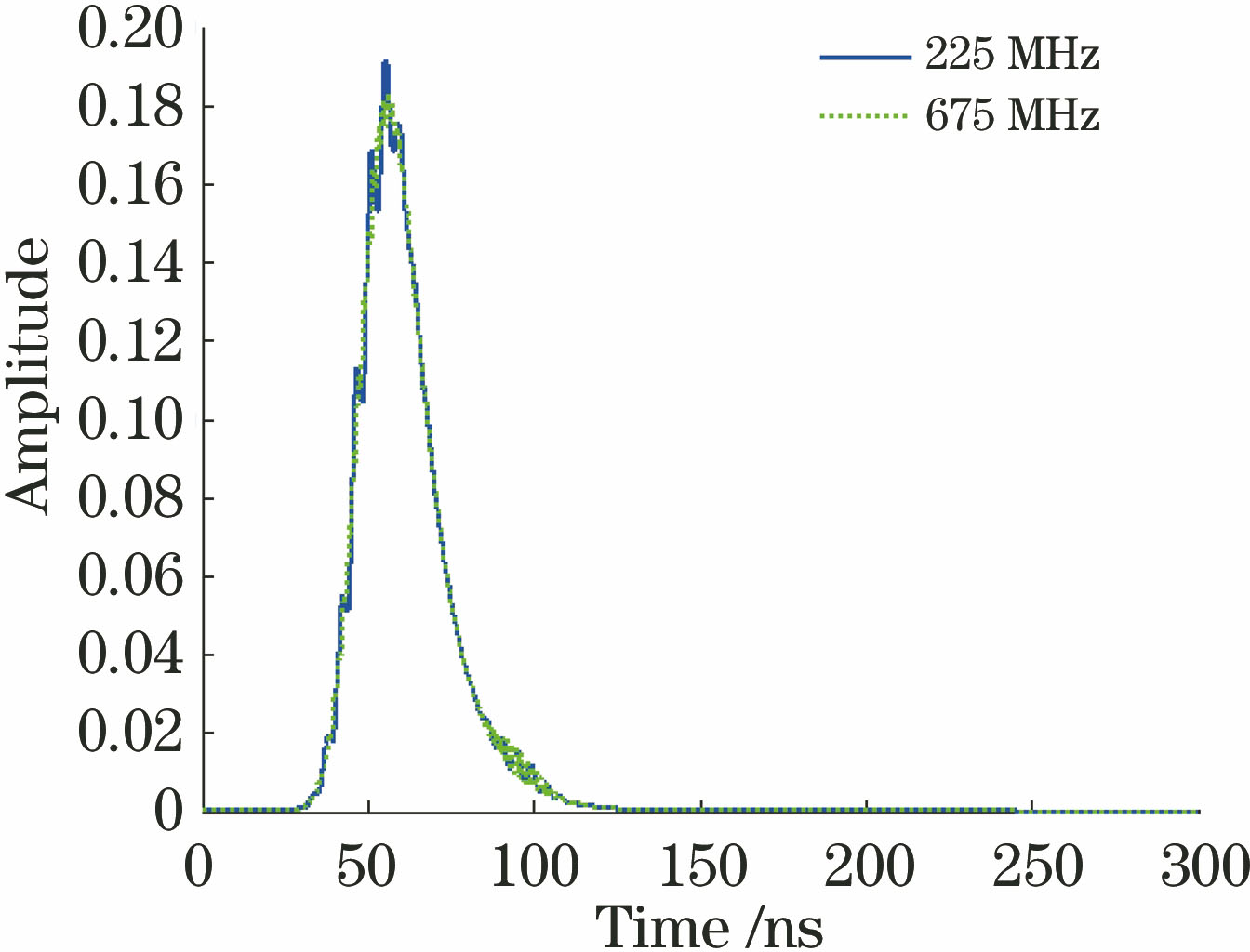
图 4. 经ICA分离。(a)目标回波信号;(b)后向散射噪声
Fig. 4. Signal separated by ICA. (a) Target echo signal; (b) backscattering noise
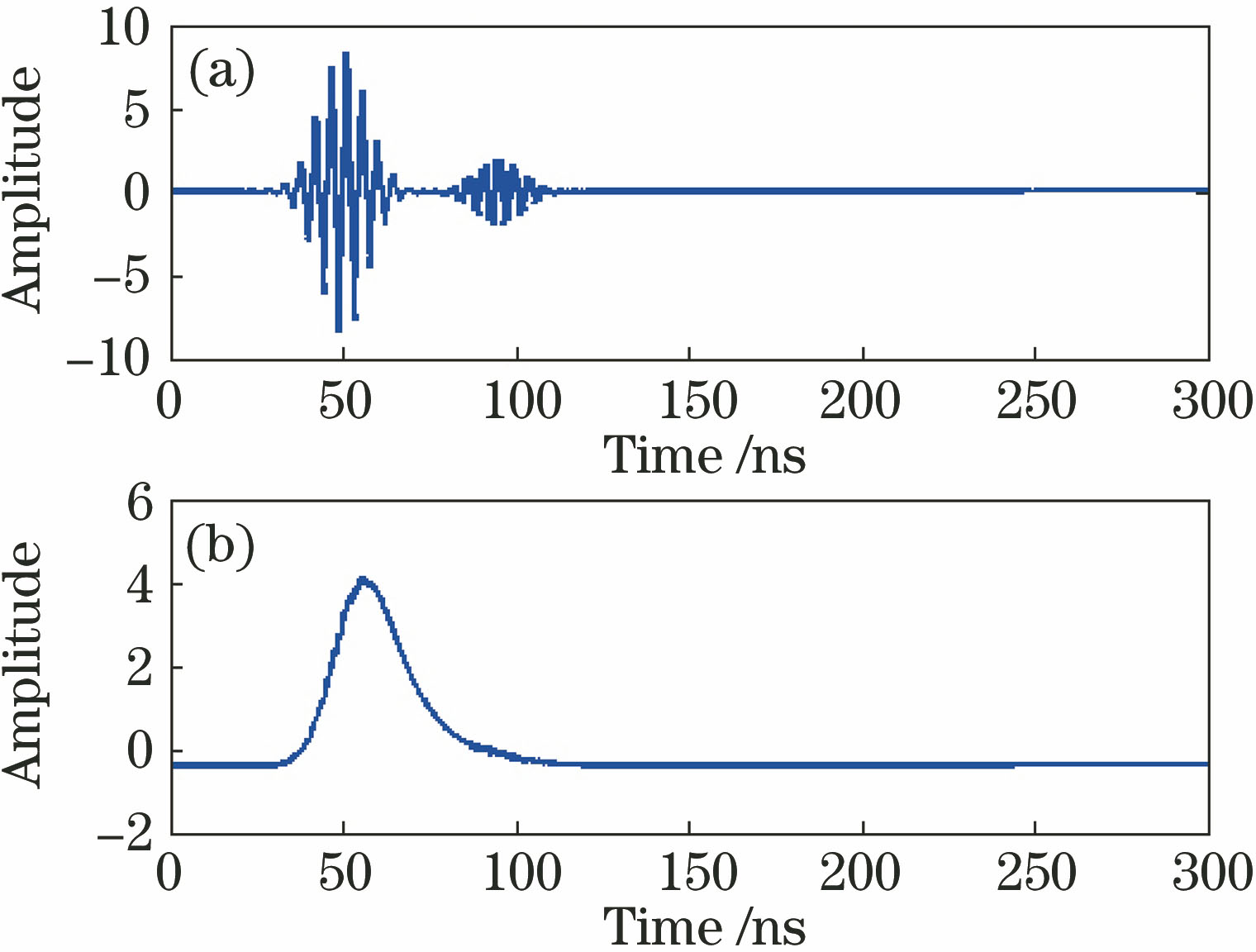
图 6. 不同发射脉冲中心下,目标深度为1~100 ns的计算结果与理论值比较。(a) 10 ns; (b) 20 ns; (c) 30 ns; (d) 40 ns; (e) 50 ns; (f) 60 ns
Fig. 6. Comparison of calculated results with theoretical values, target depth from 1 ns to 100 ns, detector pulse center from 10 ns to 60 ns. (a) 10 ns; (b) 20 ns; (c) 30 ns; (d) 40 ns; (e) 50 ns; (f) 60 ns

图 7. 固定脉冲中心时不同目标深度下的计算结果与理论值比较
Fig. 7. Comparison of calculation results with theoretical values under different target depths in condition of fixed detector pulse center
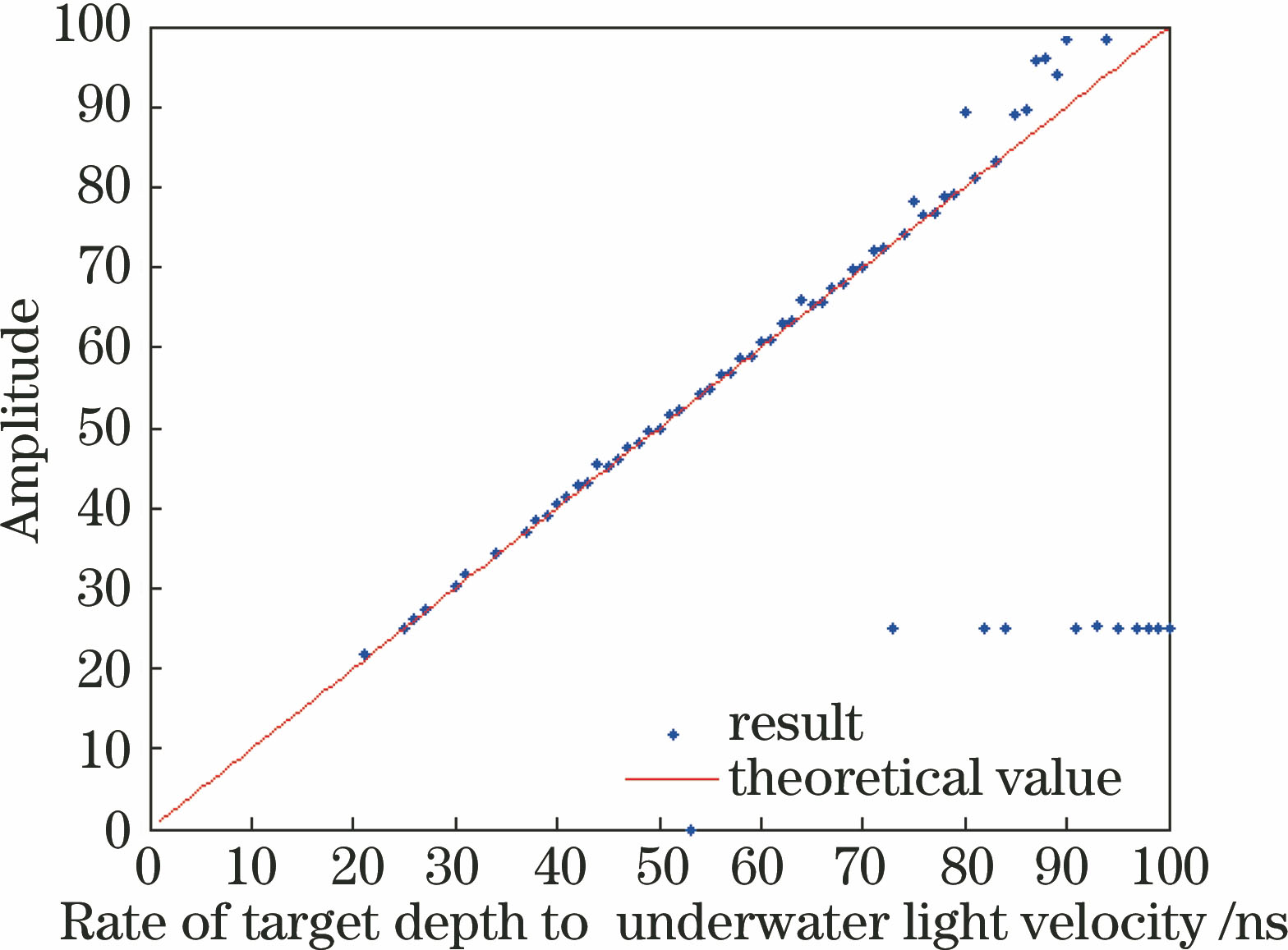
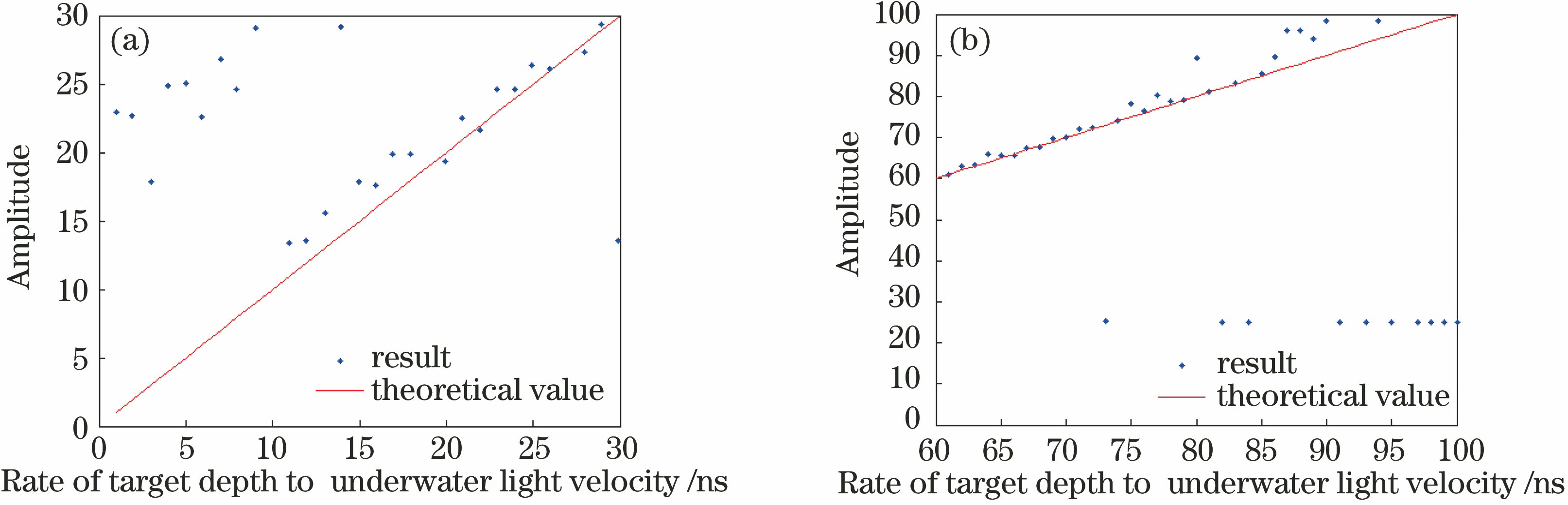
表 1仿真参数
Table1. Simulation parameters
|
齐若伊, 李坤, 杨苏辉, 高彦泽, 王欣, 李卓. 基于独立元分析的水下激光雷达后向散射噪声去除方法[J]. 光学学报, 2021, 41(4): 0401004. Ruoyi Qi, Kun Li, Suhui Yang, Yanze Gao, Xin Wang, Zhuo Li. Elimination of Backscatter Noise of Underwater LiDAR Using Independent Component Analysis Algorithm[J]. Acta Optica Sinica, 2021, 41(4): 0401004.



 PDF全文
PDF全文

