一种改进Census变换的双目匹配测距方法  下载: 1108次
下载: 1108次
Binocular Ranging Method Using Stereo Matching Based on Improved Census Transform
1 天津理工大学电气电子工程学院, 天津 300384
2 天津市复杂系统控制理论及应用重点实验室, 天津 300384
图 & 表
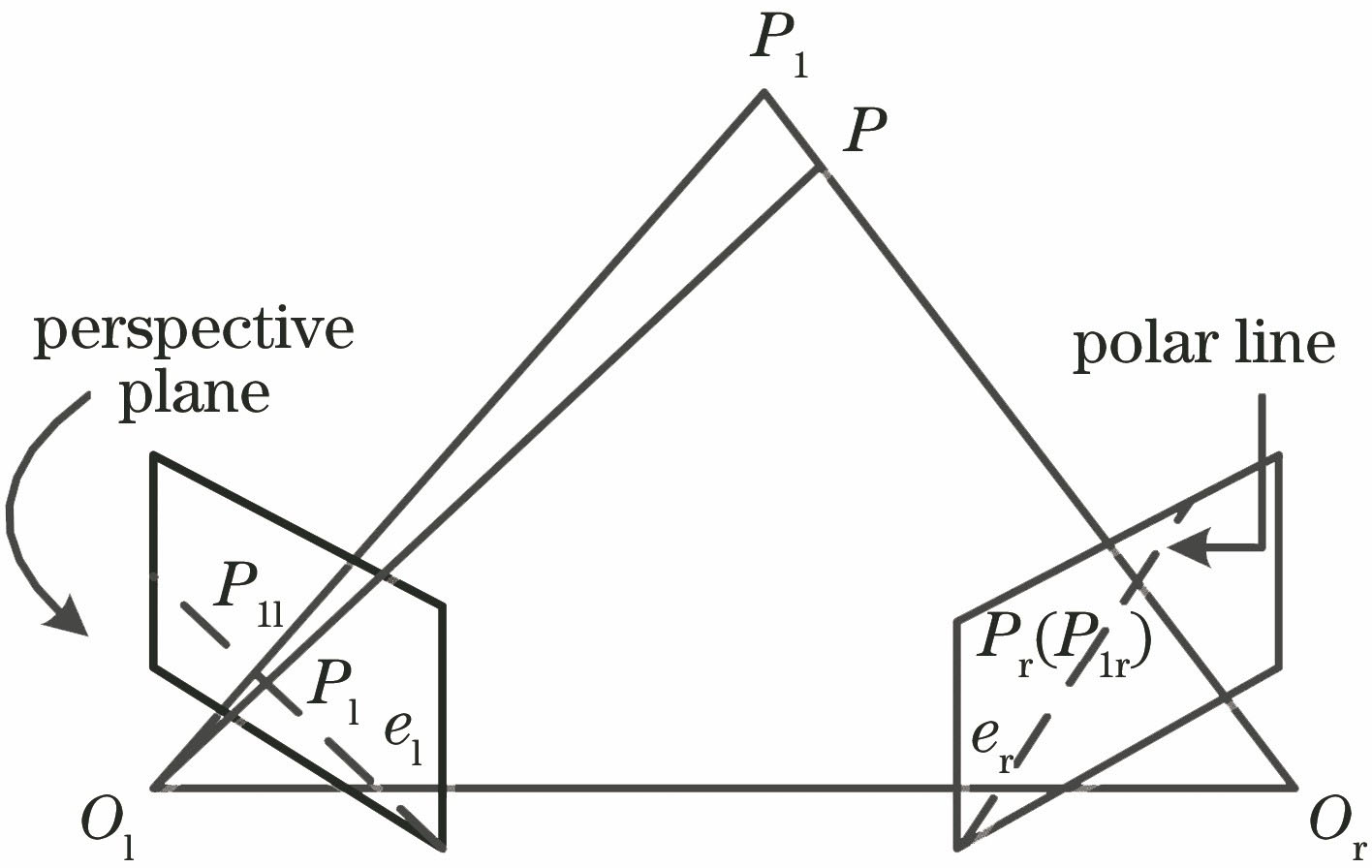
图 1. 外极线几何结构
Fig. 1. Geometric structure of epipolar-line
下载图片 查看原文
图 2. 平行校正的外极线几何结构
Fig. 2. Geometric structure of epipolar-lines for parallel correction
下载图片 查看原文
图 3. 相机标定原理
Fig. 3. Camera calibration principle
下载图片 查看原文
图 4. 硬件系统示意图。 (a)侧视图;(b)俯视图
Fig. 4. Schematic of hardware system. (a) Side view; (b) top view
下载图片 查看原文
图 5. 立体校正结果
Fig. 5. Stereo correction results
下载图片 查看原文
图 6. 行校正后立体匹配的视差图。(a)左相机原图;(b) Census变换得到的视差图;(c)改进的Census变换得到的视差图
Fig. 6. Disparity map for stereo matching after row correction. (a) Original image of left camera; (b) disparity map obtained by Census transform; (c) disparity map obtained by improved Census transform
下载图片 查看原文
表 1原始Census变换与改进Census变换的误差比较
Table1. Comparison of errors between original Census transform and improved Census transform
| Actualdistance /mm | Measured distance byimproved Census /mm | Error for improvedCensus /% | Census measuringdistance error /% | Accuracyimprovement /% |
|---|
| 400 | 400.84 | 0.21 | 2.26 | 2.05 | | 500 | 502.65 | 0.53 | 3.88 | 3.35 | | 600 | 604.98 | 0.83 | 4.95 | 4.12 | | 700 | 707.14 | 1.02 | 6.96 | 5.94 | | 800 | 809.52 | 1.19 | 8.31 | 7.12 | | 900 | 914.04 | 1.56 | 10.78 | 9.22 | | 1000 | 1019.7 | 1.97 | 13.31 | 11.34 | | 2000 | 2064.2 | 3.21 | 22.31 | 19.10 |
|
查看原文
李大华, 沈洪宇, 于晓, 高强, 汪宏威. 一种改进Census变换的双目匹配测距方法[J]. 激光与光电子学进展, 2019, 56(11): 111503. Dahua Li, Hongyu Shen, Xiao Yu, Qiang Gao, Hongwei Wang. Binocular Ranging Method Using Stereo Matching Based on Improved Census Transform[J]. Laser & Optoelectronics Progress, 2019, 56(11): 111503.








 PDF全文
PDF全文

