应用光学, 2020, 41 (2): 296, 网络出版: 2020-04-23
基于多视角融合的夜间无人车三维目标检测  下载: 630次
下载: 630次
Nighttime three-dimensional target detection of driverless vehicles based on multi-view channel fusion network
图 & 表
图 1. Structure diagram of multi-view channel fusion network
Fig. 1. Structure diagram of multi-view channel fusion network
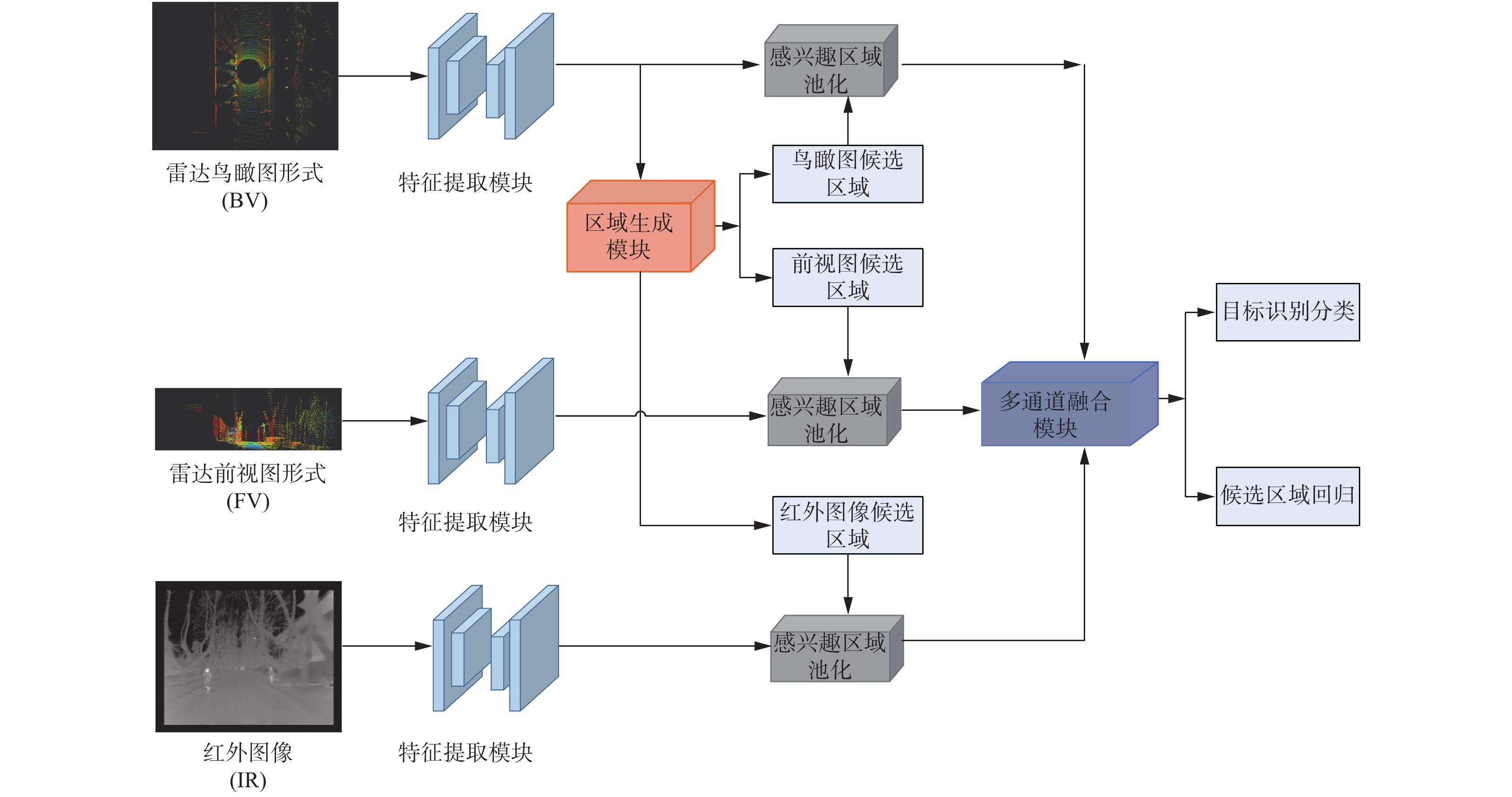
图 2. Structure diagram of feature extraction module
Fig. 2. Structure diagram of feature extraction module

图 3. Structure diagram of channel fusion network
Fig. 3. Structure diagram of channel fusion network

图 4. Input infrared image and lidar point cloud
Fig. 4. Input infrared image and lidar point cloud


表 1不同算法在测试集上的结果对比
Table1. Comparison of results for different algorithms on test sets
|
王宇岚, 孙韶媛, 刘致驿, 卜德飞. 基于多视角融合的夜间无人车三维目标检测[J]. 应用光学, 2020, 41(2): 296. Yulan WANG, Shaoyuan SUN, Zhiyi LIU, Defei BU. Nighttime three-dimensional target detection of driverless vehicles based on multi-view channel fusion network[J]. Journal of Applied Optics, 2020, 41(2): 296.



 PDF全文
PDF全文
