具有旋转特性的目标跟踪算法  下载: 822次
下载: 822次
Target Tracking Algorithm with Rotation Characteristics
1 上海理工大学光电信息与计算机工程学院, 上海 200093
2 上海市现代光学系统重点实验室, 上海 200093
图 & 表
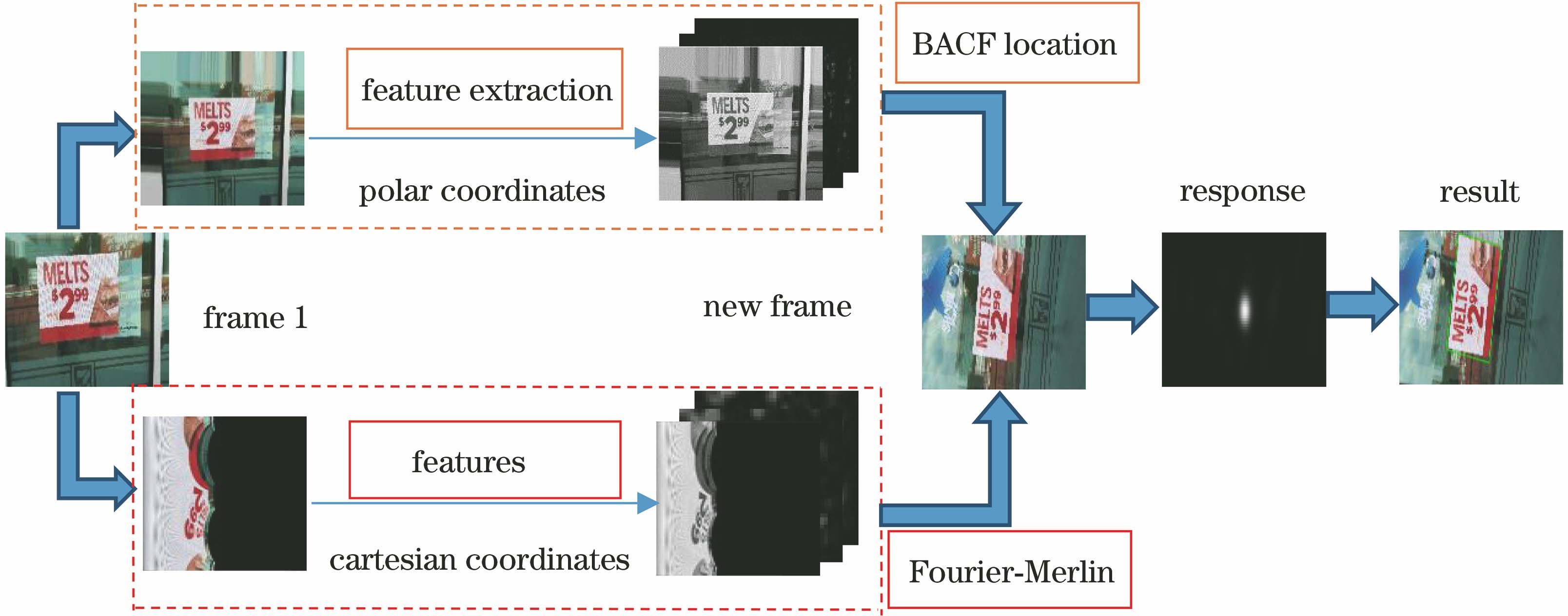
图 1. 本文算法流程图
Fig. 1. Flow chart of algorithm in this paper
下载图片 查看原文
图 2. POT综合成功率图和准确率图。(a)成功率图;(b)准确率图
Fig. 2. Comprehensive success rate and precision on POT. (a) Success rate; (b) precision
下载图片 查看原文
图 3. 添加旋转挑战因素的成功率图和准确率图。(a)成功率图;(b)准确率图
Fig. 3. Success rate and precision after adding rotation challenge factor. (a) Success rate; (b) precision
下载图片 查看原文
图 4. 添加部分挑战因素后的成功率图和准确率图。(a)尺度变换成功率;(b)尺度变换准确率;(c)遮挡成功率;(d)遮挡准确率
Fig. 4. Success rate and precision after adding some challenge factors. (a) Success rate of scale change; (b) precision of scale change; (c) success rate of occlusion; (d) precision of occlusion
下载图片 查看原文
图 5. 在OTB-2013上得到的准确率和成功率。(a)准确率图;(b)成功率图
Fig. 5. Success rate and precision on OTB-2013. (a) Precision; (b) success rate
下载图片 查看原文
图 6. 两种算法的跟踪结果对比。(a) V03_2视频序列;(b) V18_2视频序列
Fig. 6. Comparison of tracking results of two algorithms. (a) Video sequence of V03_2; (b) video sequence of V18_2
下载图片 查看原文
图 7. 不同算法的跟踪结果对比。(a) David2;(b) Vase
Fig. 7. Comparison of tracking results of different algorithms. (a) David2; (b) Vase
下载图片 查看原文
表 1成功率
Table1. Success rate
| Success rate | Rotation | Scale change | All |
|---|
| Ours | 0.9619 | 0.8701 | 0.6561 | | KCF | 0.0037 | 0 | 0.0006 | | DSST | 0.0431 | 0.9377 | 0.3579 | | BACF | 0.0399 | 0.7724 | 0.2711 | | ECO-HC | 0.0567 | 0.9921 | 0.4154 | | STAPLE | 0.0053 | 0.1276 | 0.0087 | | STRCF | 0.0648 | 0.8965 | 0.3893 |
|
查看原文
表 2准确率
Table2. Precision
| Precision | Rotation | Scale change | All |
|---|
| Ours | 0.8527 | 0.5192 | 0.5930 | | KCF | 0.0596 | 0.1277 | 0.1461 | | DSST | 0.0737 | 0.5899 | 0.3608 | | BACF | 0.0681 | 0.5319 | 0.3646 | | ECO-HC | 0.0748 | 0.5803 | 0.4303 | | STAPLE | 0.0424 | 0.3517 | 0.2065 | | STRCF | 0.0772 | 0.5721 | 0.4240 |
|
查看原文
表 3算法在OTB-2013上的准确率、成功率和运行速度
Table3. Precision, success rate, and running speed of algorithm on OTB-2013
| Algorithm | Ours | KCF | FDSST | BACF | ECO-HC | STAPLE | STRCF |
|---|
| Precision | 0.8370 | 0.7400 | 0.8040 | 0.8490 | 0.8510 | 0.7820 | 0.8890 | | Success rate | 0.7880 | 0.6230 | 0.7470 | 0.8220 | 0.8030 | 0.7380 | 0.8450 | | Running speed /(frame·s-1) | 10.3 | 386.4 | 78.9 | 24.6 | 33.7 | 80.6 | 22.6 |
|
查看原文
瑚琦, 李锐, 张薇. 具有旋转特性的目标跟踪算法[J]. 光学学报, 2020, 40(17): 1715002. Qi Hu, Rui Li, Wei Zhang. Target Tracking Algorithm with Rotation Characteristics[J]. Acta Optica Sinica, 2020, 40(17): 1715002.









 PDF全文
PDF全文

