红外与激光工程
2023, 52(6): 20230213
Author Affiliations
Abstract
1 State Key Laboratory of Pulsed Power Laser Technology, National University of Defense Technology, Hefei 230037, China
2 Anhui Provincial Key Laboratory of Electronic Restriction, National University of Defense Technology, Hefei 230037, China
3 The Military Representative Bureau of the Ministry of Equipment Development, Central Military Commission in Beijing, Beijing 100191, China
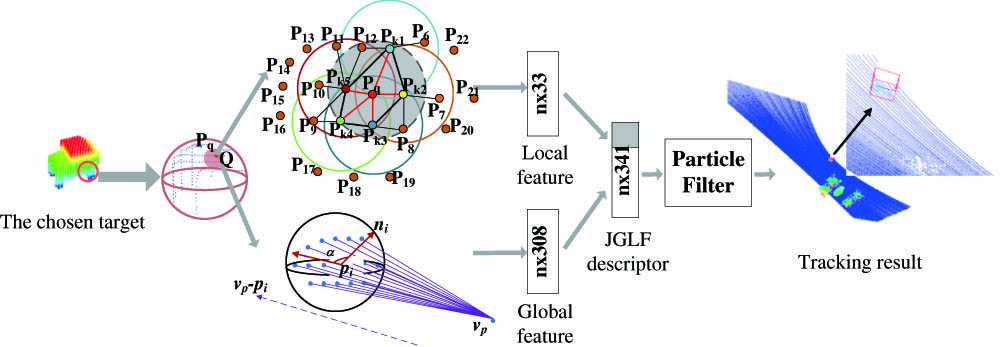
To fully describe the structure information of the point cloud when the LIDAR-object distance is long, a joint global and local feature (JGLF) descriptor is constructed. Compared with five typical descriptors, the object recognition rate of JGLF is higher when the LIDAR-object distances change. Under the situation that airborne LIDAR is getting close to the object, the particle filtering (PF) algorithm is used as the tracking frame. Particle weight is updated by comparing the difference between JGLFs to track the object. It is verified that the proposed algorithm performs 13.95% more accurately and stably than the basic PF algorithm.
object tracking LIDAR global and local feature descriptor point cloud Chinese Optics Letters
2020, 18(6): 061001
1 国防科技大学电子对抗学院脉冲功率激光技术国家重点实验室, 安徽 合肥 230037
2 安徽省电子制约技术重点实验室, 安徽 合肥 230037
3 中央军委装备发展部驻北京地区军事代表局, 北京 100191
实际场景中各物体的尺寸差异导致激光三维数据中各物体对应的三维积分区域(SVR)存在差异。在初始帧中,借助于SVR筛选与全局特征匹配完成目标识别,实现对待跟踪目标的自动选取,并且比较四种全局特征描述子的识别能力及运行速度。得到初始帧中的目标位置后,提出了利用全局特征匹配在后续帧中实施目标跟踪的方法。实验结果表明,SVR筛选有利于提高识别跟踪的准确率及算法整体运行速度。
图像处理 目标跟踪 激光点云 目标识别 三维全局特征 激光雷达 激光与光电子学进展
2020, 57(6): 061012









