1 中国科学院 长春光学精密机械与物理研究所,吉林长春30033
2 中国科学院大学,北京100049
本文将冗余机械臂的轨迹跟踪和避障规划统一为优化问题,提出了一种基于改进灰狼算法的避障跟踪优化器。首先,基于包围盒法对避障空间进行了建模,使用GJK算法计算机械臂与障碍物之间的最小距离。其次,设计了适应度函数,引入避障奖励项对优化器进行主动奖励,使机械臂在跟踪目标轨迹的同时避开障碍物。然后,使用随机分散策略对灰狼算法进行了改进,以增强算法的全局搜索能力,从而更好地求解优化问题。最后,使用九自由度冗余机械臂验证了所提出方法的有效性和优越性。实验结果表明:对于圆形目标轨迹,机械臂的末端跟踪误差为0.21 mm;跟踪过程中,机械臂与障碍物的距离不小于70 mm;相比于经典灰狼算法,改进灰狼算法使跟踪精度提高了13%。本文提出的避障跟踪优化器能以毫米级的精度同时满足冗余机械臂的轨迹跟踪和避障任务;改进的灰狼算法能有效提高经典灰狼算法的收敛精度。
冗余机械臂 灰狼算法 轨迹跟踪 避障规划 redundant robotic manipulator grey wolf optimizer trajectory tracking obstacle avoidance 光学 精密工程
2023, 31(24): 3595
1 国网湖南省电力有限公司电力科学研究院,湖南长沙 410007
2 湖南大学机器人学院,湖南长沙 410082
本文提出一种基于谱残差变换的电力设备热缺陷识别技术。首先,根据电力设备红外图像中自然背景的冗余特性和热缺陷目标的显著性特征来构建谱残差变换模型,对电力设备红外图像进行谱残差变换,生成具有显著性信息的热缺陷初始识别结图。然后,采用引导滤波技术对初始识别结果进行处理,联合利用红外图像中的温差信息和空间结构信息,提升热缺陷的识别率,生成最终识别结果图。实验结果表明:与其他传统热缺陷识别方法相比,本文所提出的方法在识别精度与识别效率上有显著优势,满足电力设备热缺陷带电检测的应用需求。
电力设备 红外图像 热缺陷识别 谱残差变换 冗余信息 power equipment, infrared image, thermal defect de redundant information
西安建筑科技大学信息与控制工程学院,陕西 西安 710055
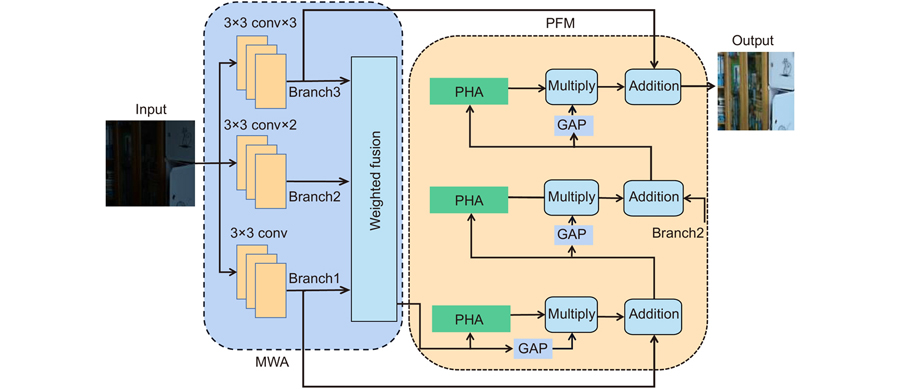
Overview: In many scenes in real life, collecting high-quality images is one of the key factors to achieve high accuracy in object detection, image segmentation, automatic driving, medical surgery, and other works. However, images and videos collected by electronic devices are very vulnerable to various environmental factors, such as poor lighting, resulting in low image brightness, color distortion, more noise, effective details, and texture information loss, which brings many difficulties to subsequent tasks and works. The enhancement of low-illumination images generally restores image clarity by increasing brightness, removing noise, and restoring image color. In recent years, the depth neural network has had a strong nonlinear fitting ability, which has achieved good results in low illumination enhancement, image deblurring, and other fields. However, the existing low illumination image enhancement algorithms will lead to color imbalance when improving image brightness and contrast, and easily ignore the impact of some noises. Based on the above questions, this paper proposes an image enhancement method with parallel mixed attention step-by-step fusion. With the aid of the limited correlation between local features extracted by weighting different multi-scale branches, the local image details under multiple receptive fields can complement each other, and use parallel mixed attention to focus on color information and lighting features at the same time, which effectively improves the detail representation of the network and reduces noises. Finally, shallow feature information is fused in multiple stages. In order to alleviate the model confusion caused by the weakening of color information expression and single-stage feature superposition caused by the increase of network depth. The ablation experiment, module multi-stage experiment, and multiple evaluation indexes are compared with the existing advanced methods on four commonly used datasets, which fully proves that the method proposed in this paper is superior to the comparison methods on multiple evaluation parameters, and can effectively improve the overall brightness of the image, adjust the image color imbalance and remove noises. Combining the follow-up research task of the subject and analyzing the shortcomings of the network, a way to simplify the model and improve the operation speed will be the key direction of the follow-up research task.
图像增强 多尺度加权聚合 并行混合注意力 渐进融合 信息冗余 image enhancement multiscale weighted aggregation parallel hybrid attention progressive integration information redundancy
航天工程大学 宇航科学与技术系,北京 101416
冗余旋转惯导系统(Redundant Rotating Inertial Navigation System, RRINS)可以在传统旋转惯导系统的基础上,进一步提高系统的可靠性。针对该类系统高精度初始对准需求,以正四面体冗余旋转惯导系统为例,研究了两位置初始对准方法。首先以每3个陀螺仪和3个加速度计构成一种组合方式,建立每种组合下惯性器件的零偏与冗余配置相关的解析表达式,并设计RRINS两位置转停方案以估计对应惯性器件的零偏,但是在某些特殊的情况下需要增加观测位置;然后将每个惯性器件在不同组合下得到的结果取均值,并利用该均值对相应惯性器件的测量信息做补偿;最后基于补偿后的惯性器件输出进行RRINS的初始对准。数学仿真和实验验证结果表明,该方法在不同两位置方案下均可有效估计出惯性器件的零偏。仿真中陀螺仪的零偏估计误差在4%以内,加速度计的零偏估计误差基本在2%以内,且相比无零偏补偿的情况,初始对准精度提高10倍以上。实验中水平和方位向的初始对准精度都有提高,航向角对准误差最大减小100倍左右。同时,该方法还可以推广到其他配置方案的冗余旋转惯导系统中,对该类惯导系统初始对准精度的提高具有一定借鉴意义。
冗余旋转惯导系统 两位置对准 误差补偿 解析对准 redundant rotating inertial navigation system two-position alignment error compensation analytic alignment 红外与激光工程
2023, 52(1): 20220414
提出了一种用于生产浮法玻璃的过渡辊台与退火窑传动系统以及控制方法,通过设置冗余控制器和互为备用的传动电机等,构建了具备容错特性的传动系统,并根据此硬件基础开发了一种基于冗余容错策略的控制方法。该方法包括驱动控制层、冗余切换层和速度判断层3层控制架构,确保了过渡辊台传动和退火窑传动速度匹配良好。设计了冗余容错的控制流程,通过对故障信息的判断,实现了主用与备用传动自动无扰切换。该传动系统及控制方法提高了过渡辊台与退火窑传动系统的鲁棒性,保证了高端精密浮法玻璃的光学性能,有效提升了产品质量。
传动系统 冗余容错 过渡辊台 退火窑 控制方法 drive system redundant fault-tolerant dross box lehr control method
1 中国科学院合肥物质科学研究院 核能安全技术研究所 合肥 230031
2 中国科学技术大学 合肥 230026
开展考虑设备启动时间和启动失效的核电厂冷冗余系统故障机理研究,提出一种基于蒙特卡罗数值模拟的可靠性分析方法,建立冷冗余系统失效概率的统计量表达式。以核电厂应急柴油发电机组为例,开展案例分析,获得应急柴油发电机组的失效概率分布曲线及各设备参数的敏感度曲线,并将结果与静态故障树(Static Fault Tree,SFT)、传统动态故障树(Dynamic Fault Tree,DFT)方法进行对比。案例结果分析表明:1)所提方法可以对冷冗余设备的启动时间与启动失效进行建模分析,反映冷冗余系统的真实失效场景与实际运行状态;2)所提方法精确评价系统失效概率、识别不同时间段的高敏感性设备参数、以及分析启动时间对系统失效概率的影响,对冗余系统的优化设计有一定的理论指导意义。
启动失效 动态故障树 核电厂 冷冗余 可靠性 Startup failure Dynamic fault tree Nuclear power plant Cold redundancy Reliability 红外与激光工程
2022, 51(7): 20210784
重庆理工大学电气与电子工程学院,重庆 400054
针对自由空间光通信中Spinal码译码复杂度高及不等差错保护问题,提出一种分段循环冗余校验(CRC)、Spinal码与BCH码级联的SCB-Spinal码方案。通过分段的CRC校验提前终止过程,减少解码计算量,降低了译码复杂度,并在尾部级联BCH码对易错的尾部信息进行纠错保护。仿真结果表明:在不同湍流强度下,SCB-Spinal码方案都有效地降低了译码复杂度并获得了更好的误码率性能,在弱湍流强度低信噪比情况下较传统Spinal码方案降低了约62%的复杂度,速率也有0.04~0.17 bit/symbol的性能提升;在中强湍流强度影响下,较传统Spinal码方案降低了50%~60%的复杂度。在为自由空间光通信中Spinal码的高效应用提供了一种解决方案。
光通信 自由空间光通信 Spinal码 译码复杂度 循环冗余码 BCH码 大气湍流 激光与光电子学进展
2022, 59(23): 2320003
河南科技大学农业装备工程学院, 河南 洛阳 471003
土地利用/覆被变化(LUCC)问题是全球环境变化关注的热点问题之一。 研究伊洛河流域的土地利用变化对黄河流域生态保护与高质量发展具有重要意义。 基于长期的LandsatTM卫星遥感影像、 R语言弦图可视化模型以及线性模型冗余分析(RDA分析), 对伊洛河流域1990年—2020年30年间的土地利用时空变化特征、 土地覆被的流量、 流向及内在驱动因素进行了分析。 结果表明: (1) 1990年—2020年间, 伊洛河流域的土地变化呈现林地先减小后增加、 耕地先增加后减小、 建设用地整体增加、 水域整体减小的变化趋势; (2) 在数量上, 1990年—2020年每10年间, 耕地和林地的总变化量最大, 建设用地次之, 水域、 草地和未利用土地的变化量很小; (3) 1990年—2000年、 2000年—2010年、 2010年—2020年的土地利用类型相互转换主要以耕地和林地的相互转化为主, 土地利用变化程度呈上升趋势, 在2010年—2020年达到最高; (4) 1990年—2020年间, 林地重心整体向东北方向偏移, 耕地的重心整体向南迁移, 林地和耕地重心的变化与退耕还林政策有关。 建设用地总体围绕洛阳市主城区, 这与社会经济发展和城镇发展方向有关; (5) 在驱动力方面, 经济高速发展和退耕还林政策的实施是推动伊洛河流域土地利用面积变化的主要原因, 其中, 退耕还林政策的实施是林地和耕地面积变化的主要原因。 研究结果可为黄河流域生态保护和可持续发展提供科学依据。
伊洛河流域 土地利用 转移矩阵 驱动力 冗余分析 Yiluo River Basin Land-use Transfer matrix Driving force Redundancy analysis 光谱学与光谱分析
2022, 42(10): 3180









