True random coded photon counting Lidar
1 Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China
2 University of Chinese Academy of Sci-ences, Beijing 100049, China
3 Key Laboratory of Science and Technology on Space Optoelectronic Precision Measurement, Chinese Academy of Sciences, Chengdu 610209, China
Figures & Tables
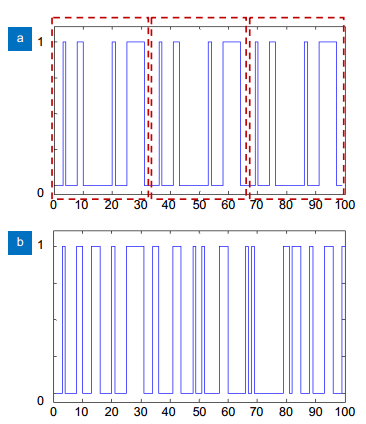
Fig. 1. (a) Pseudo-random sequence and (b) true random sequence.
下载图片 查看原文
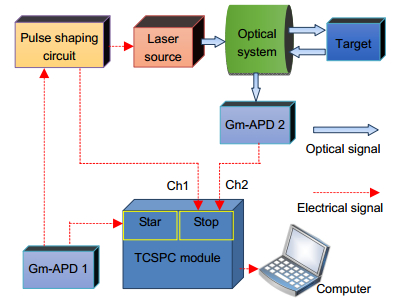
Fig. 2. True random coded photon counting Lidar system.
下载图片 查看原文
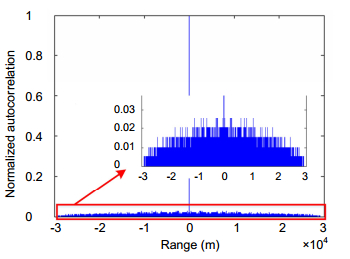
Fig. 3. Normalized auto-correlation function of the true random sequence
下载图片 查看原文
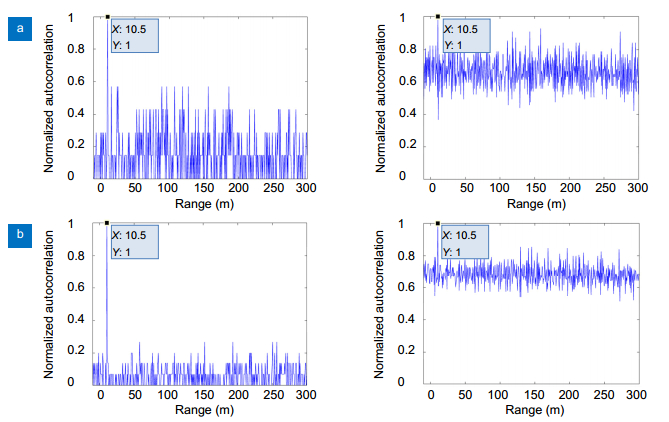
Fig. 4. Normalized auto-correlation range images with two different echo photons number for the true random coded method and the pseudo-random coded method.
下载图片 查看原文
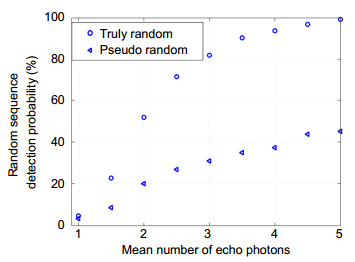
Fig. 5. The detection probability statistical results of the true random coded method and the pseudo-random coded method at different mean echo photons number.
下载图片 查看原文
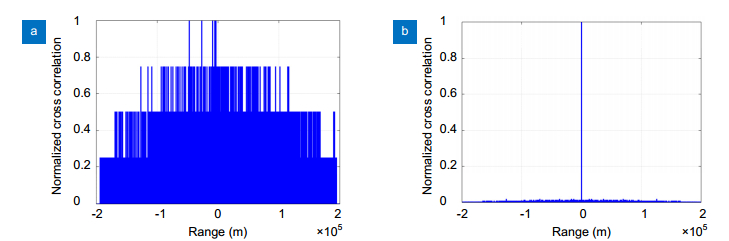
Fig. 6. Normalized cross-correlation range images for the true random sequence (a) and the sparse pseudo-random sequence (b).
下载图片 查看原文
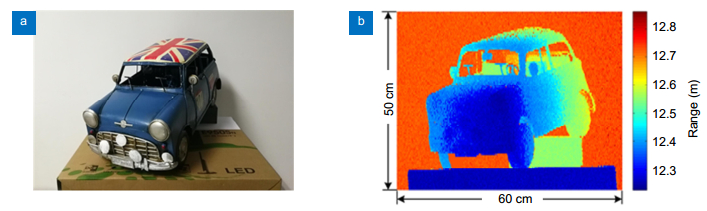
Fig. 7. (a) The picture of the model car and (b) three-dimensional scanning imaging of the model car.
下载图片 查看原文
Table1. Main parameters of the Lidar system.
| Parameter | Value | | Dead time | 35 ns | | Pulse width | 4 ns | | Noise count | 1 Mcps | | Photon detection efficiency | 2% | | Time resolution of TCSPC module | 64 ps |
|
查看原文
Table2. Key parameters for the depth profile measurement.
| Parameter | Value | | Power | 30 μW | | Pixel dwell time | 200 μs | | Pulse repetition frequency | 5 kHz | | Scan dimensions width×height) | 0.6 m×0.5 m | | Resolution of scanned image (pixels) | 300×250 |
|
查看原文
Bo Liu, Yang Yu, Zhen Chen, Weiqiang Han. True random coded photon counting Lidar[J]. Opto-Electronic Advances, 2020, 3(2): 02190044.


 PDF全文
PDF全文
