基于干涉条纹的光轴平行性校准方法  下载: 1222次
下载: 1222次
Method for Calibration of Optical Axis Parallelism Based on Interference Fringes
1 华中科技大学光学与电子信息学院, 湖北 武汉 430074
2 成都英飞睿技术有限公司, 四川 成都 610213
图 & 表
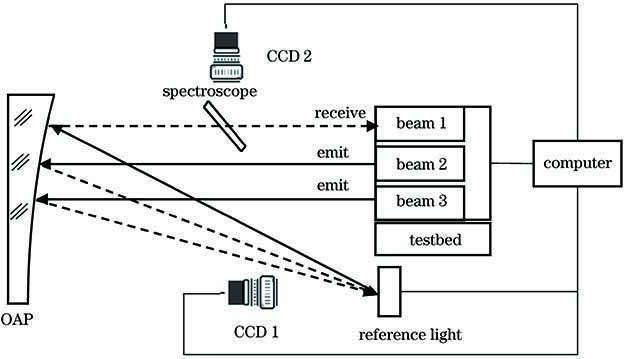
图 1. 校准系统的原理示意图
Fig. 1. Schematic of calibration system
下载图片 查看原文
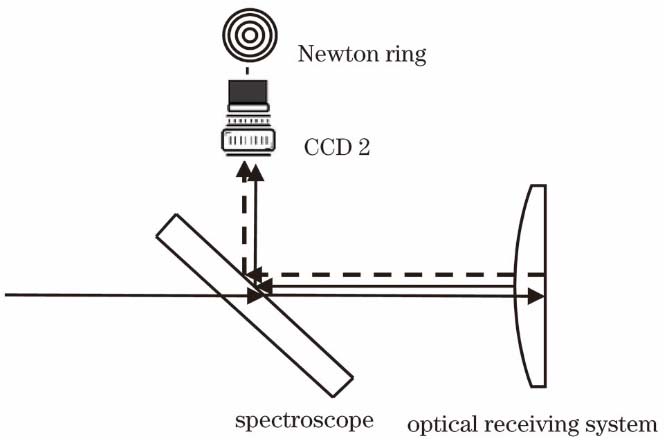
图 2. 判断光轴平行性的原理示意图
Fig. 2. Schematic for determining parallelism ofoptical axis
下载图片 查看原文
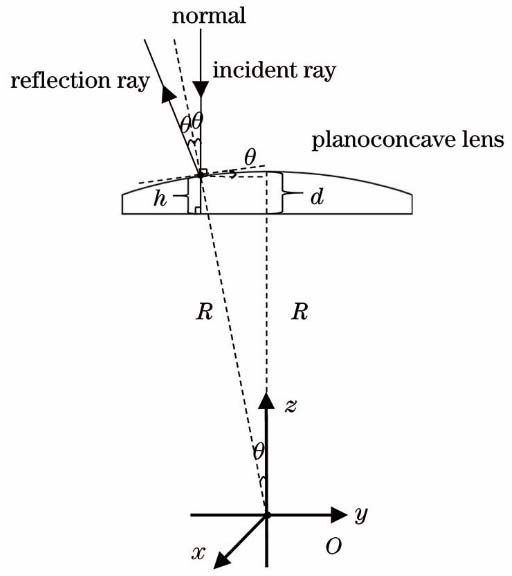
图 3. 接收光学系统的坐标系
Fig. 3. Coordinate system of receiving optical system
下载图片 查看原文
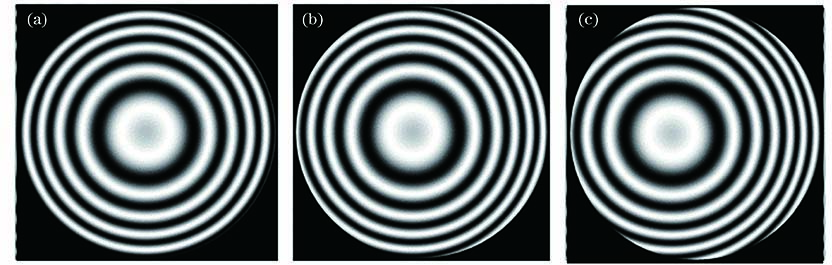
图 4. 不同角度偏差的MATLAB仿真干涉图样。(a) 0 mrad; (b) 0.5 mrad; (c) 1.5 mrad
Fig. 4. MATLAB simulation interference patterns with different angle deviations. (a) 0 mrad; (b) 0.5 mrad; (c) 1.5 mrad
下载图片 查看原文
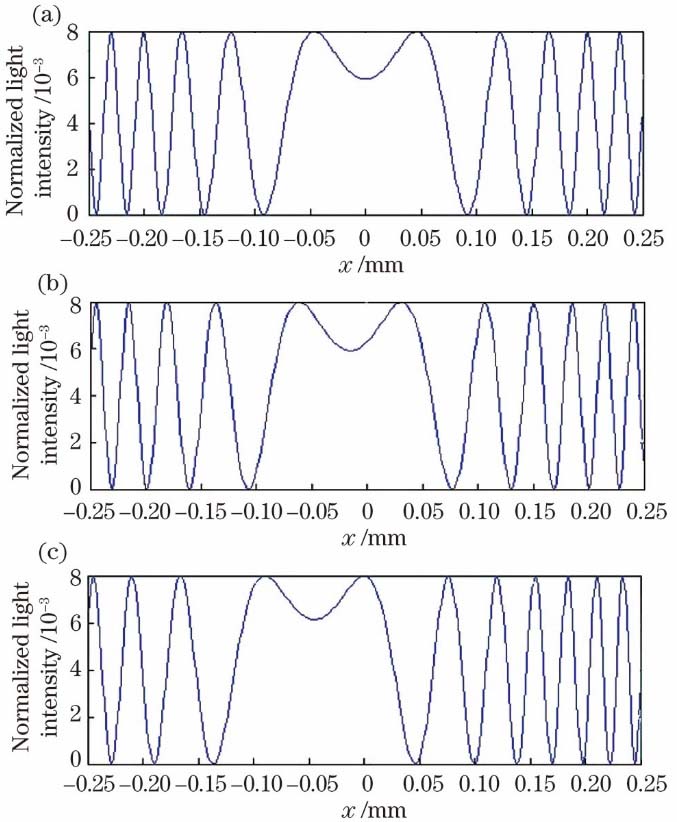
图 5. 不同角度偏差的光强分布曲线。(a) 0 mrad; (b) 0.5 mrad; (c) 1.5 mrad
Fig. 5. Light intensity distribution curves with different angle deviations. (a) 0 mrad; (b) 0.5 mrad; (c) 1.5 mrad
下载图片 查看原文
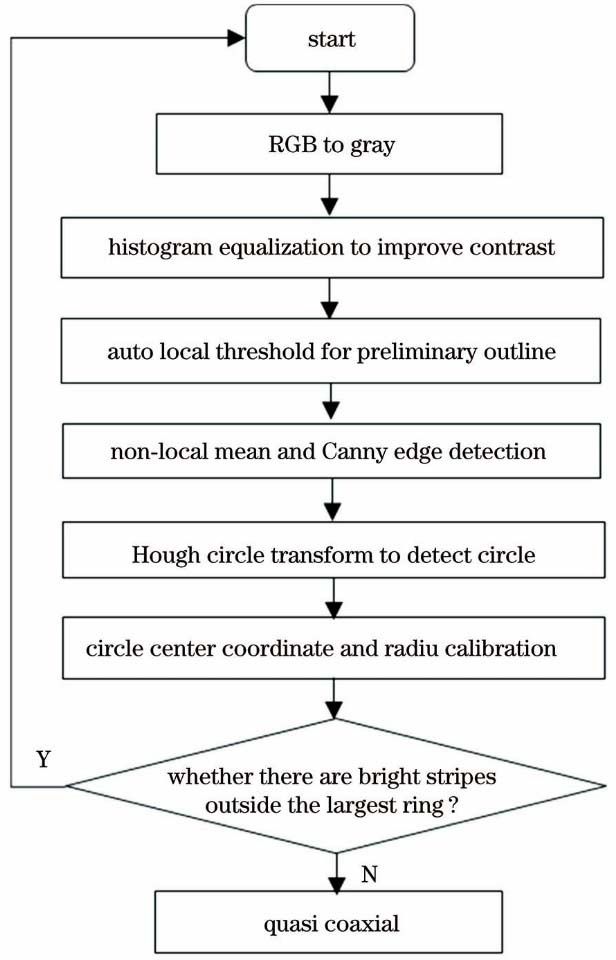
图 6. 干涉条纹图像处理的流程
Fig. 6. Flow chart of interference fringe image processing
下载图片 查看原文
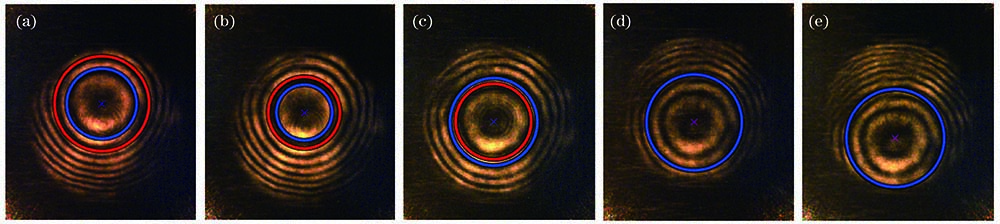
图 7. 圆心坐标的标定。(a) No.4; (b) No.5; (c) No.7; (d) No.11; (e) No.12
Fig. 7. Calibration of center coordinates. (a) No.4; (b) No.5; (c) No.7; (d) No.11; (e) No.12
下载图片 查看原文
表 1接收光学系统的光轴与基准光轴同轴的测量数据
Table1. Measurement data of coaxial between optical axis of receiving optical system and reference optical axis
| N | /mm | Δ /mrad | (/3.45) /μm | Δ /mrad | /(″) |
|---|
| 10 | 12.00 | 0 | (1019.9,763.8) | 0 | 0 |
|
查看原文
表 2接收光学系统的光轴与基准光轴的夹角测量数据
Table2. Measurement data of angle between optical axis of receiving optical system and reference optical axis
| No. | /mm | Δl /mm | Δ/mrad | (Oxy/3.45) /μm | Δs /mm | Δ/mrad | /(″) |
|---|
| 1 | 12.350 | 0.350 | 3.500000 | (1018.6,703.6) | 0.207738 | 3.462307 | 7.78 | | 2 | 12.300 | 0.300 | 3.000000 | (1019.4,711.4) | 0.180783 | 3.013049 | 2.69 | | 3 | 12.250 | 0.250 | 2.500000 | (1019.4,720.0) | 0.151120 | 2.518664 | 3.85 | | 4 | 12.200 | 0.200 | 2.000000 | (1020.0,728.8) | 0.120751 | 2.012508 | 2.58 | | 5 | 12.150 | 0.150 | 1.500000 | (1019.7,736.8) | 0.093153 | 1.552543 | 10.84 | | 6 | 12.100 | 0.100 | 1.000000 | (1019.4,746.7) | 0.059020 | 0.983670 | 3.37 | | 7 | 12.050 | 0.050 | 0.500000 | (1020.5,755.0) | 0.030431 | 0.507175 | 1.48 | | 8 | 11.950 | -0.050 | 0.500000 | (1021.1,772.7) | 0.056597 | 0.516381 | 3.38 | | 9 | 11.900 | -0.100 | 1.000000 | (1020.3,780.2) | 0.053148 | 0.943280 | 11.70 | | 10 | 11.850 | -0.150 | 1.500000 | (1021.8,789.6) | 0.089251 | 1.487517 | 2.57 | | 11 | 11.800 | -0.200 | 2.000000 | (1022.3,798.0) | 0.118280 | 1.971336 | 5.91 | | 12 | 11.750 | -0.250 | 2.500000 | (1021.7,807.3) | 0.150203 | 2.503391 | 0.70 | | 13 | 11.700 | -0.300 | 3.000000 | (1022.9,815.6) | 0.179009 | 2.983491 | 3.41 | | 14 | 11.650 | -0.350 | 3.500000 | (1022.3,824.8) | 0.210613 | 3.510214 | 2.11 |
|
查看原文
表 3激光测距机的测量结果
Table3. Measurement results of laser rangefinder
| Laser rangefinder | N | D /m | /m |
|---|
| 1 | 219 | 3271.88 | 0.48 | | 2 | 222 | 3270.98 | 0.43 |
|
查看原文
徐丹慧, 唐霞辉, 方国明, 吴东京, 周海蓉. 基于干涉条纹的光轴平行性校准方法[J]. 光学学报, 2020, 40(17): 1712005. Danhui Xu, Xiahui Tang, Guoming Fang, Dongjing Wu, Hairong Zhou. Method for Calibration of Optical Axis Parallelism Based on Interference Fringes[J]. Acta Optica Sinica, 2020, 40(17): 1712005.



 PDF全文
PDF全文

