基于优化区域卷积神经网络的机场区域检测  下载: 1377次
下载: 1377次
Airport Area Detection Based on Optimized Regional Convolutional Neural Network
1 空军工程大学研究生院, 陕西 西安, 710038
2 空军工程大学航空工程学院, 陕西 西安, 710038
图 & 表
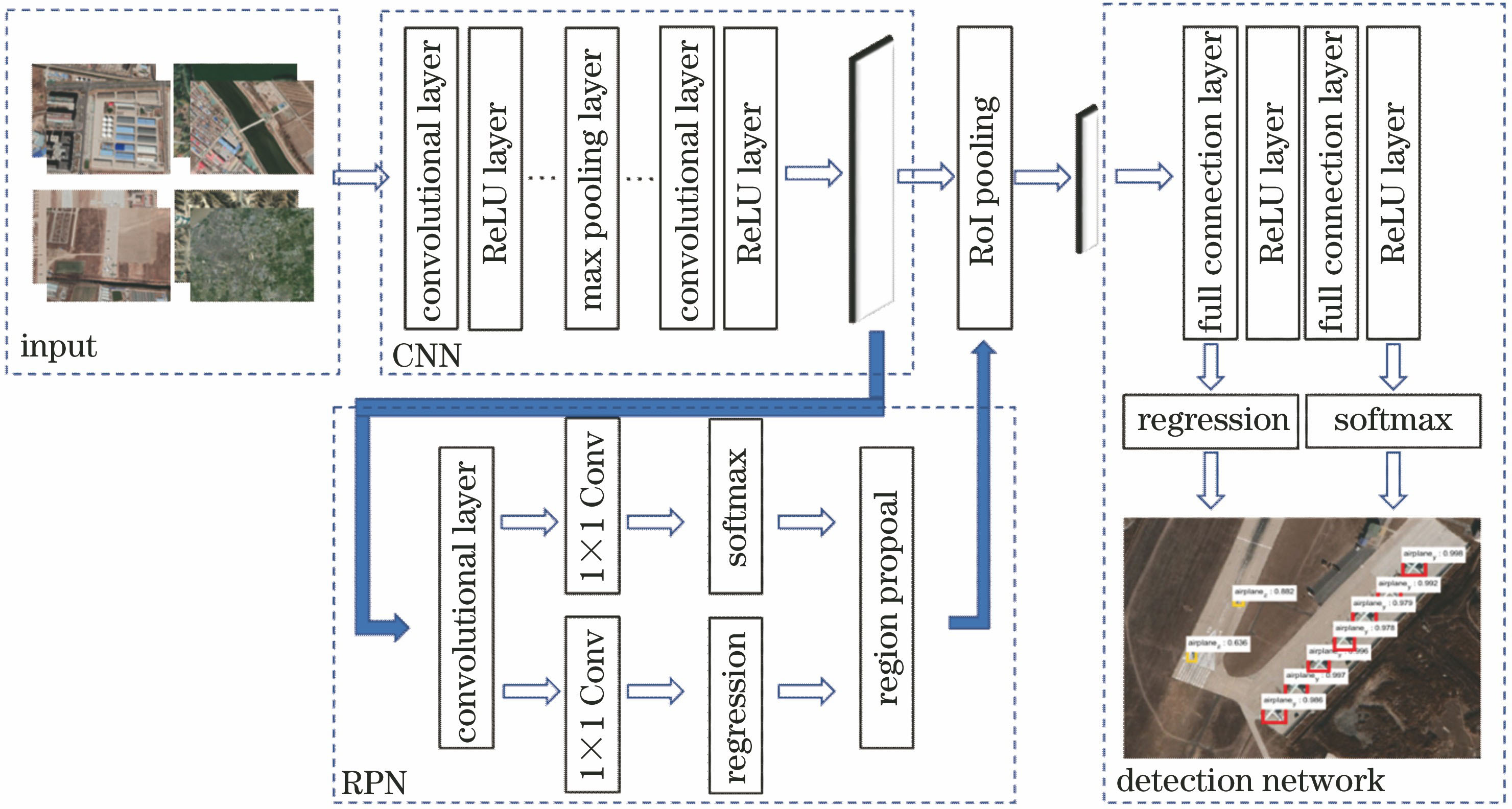
图 1. 检测步骤的主要流程框架图
Fig. 1. Main process framework of detection
下载图片 查看原文
图 2. 机场区域检测步骤示意图
Fig. 2. Schematic of airport area detection
下载图片 查看原文
图 3. 差异值算法生成的锚框以及传统锚框
Fig. 3. Anchor generated based on the difference value algorithm and traditional anchors
下载图片 查看原文
图 4. 加入T2的改进算法与原算法P-R曲线对比图
Fig. 4. Comparison of the improved algorithm of adding T2 and the original algorithm P-R curve
下载图片 查看原文
图 5. 误检示意图以及局部放大
Fig. 5. Schematic diagram of false detections and partial magnification
下载图片 查看原文
图 6. T3改进算法与原算法的ROC曲线对比图
Fig. 6. Comparison of ROC curve between T3 improved algorithm and original algorithm
下载图片 查看原文
图 7. 数据集构建流程图
Fig. 7. Flow chart of data set construction
下载图片 查看原文
图 8. 部分原始数据集
Fig. 8. Partial raw data set
下载图片 查看原文
表 1差异值算法生成锚框步骤示意
Table1. Schematic of difference value algorithm generates anchor step
| Difference value algorithm generates anchor box |
|---|
| Step 1: Extract the area and proportion information of the ground truth of some targets in each type of target from the regional proposal network as a sample.Step 2: The information extracted from various targets is transformed into a two-dimensional European space.Step 3: Initialize 9 anchor boxes randomly (the number selection is modeled after the Faster R-CNN detection algorithm. Too much is easy to multiply the calculation amount, and too few is not easy to represent the full scale of the target) and compare the 9 anchor boxes with all of the selected samples ground truth information and calculate the difference value of each box.Step 4: The ground truth with small difference value is divided into a combination around the corresponding anchor box.Step 5: Calculate the average size of the ground truth in each combination as a new anchor box.Step 6: Repeat the above steps until the difference does not change much after each iteration, and get the best 9 anchor boxes. |
|
查看原文
表 2T1改进算法与原算法性能对比表
Table2. Comparison of T1 improved algorithm and original algorithm performance
| Method | mAP /% | Mean time /s |
|---|
| Faster R-CNN | 67.5 | 0.142 | | Faster R-CNN+T1 | 70.3 | 0.142 |
|
查看原文
表 3加入T2的改进算法与原算法性能对比表
Table3. Comparison of improved algorithm and original algorithm performance of adding T2
| Method | mAP /% | Mean time /s |
|---|
| Faster R-CNN | 67.5 | 0.142 | | Faster R-CNN+T2 | 68.8 | 0.143 |
|
查看原文
表 4先验判决算法步骤
Table4. Prior judgment algorithm steps
| A priori decision implementation steps |
|---|
| Step 1: Read the classification results of the detection network from the log file (where the labels are assigned to the values 0, 1, 2, …, 6 in the order in Table 6) and the corresponding confidence levels.Step 2: If multiple types of labels are detected and the product of the label values is 0, then Step 3 is performed, otherwise the label name is directly output.Step 3: Compare the average of the detection confidence of the target with a non-zero label to the average of the target detection confidence with a label value of 0 to obtain a label with a larger average confidence value. If the target average confidence level with a label value of 0 is large, 0 is output, otherwise all other non-zero label values are output.Step 4: Read the label value in Step 3 and output the corresponding label name. |
|
查看原文
表 5实验数据集与传统数据集特色对比
Table5. Comparison of experimental data sets and traditional data sets
| Item | Traditional remote sensing target detection data set | Experimental target detection data set |
|---|
| Category | Single class | Multi-class | | Scale | Medium/large | Small/medium/large scale(especially focusing on small scale targets) | | Perspective | Vertical viewing angle | 30°, 60°, 90°, etc. Multi-viewing angle | | Background | Simple background | Focus on target detection incomplex backgrounds(especially airport backgrounds) |
|
查看原文
表 6标签及其对应目标对照表
Table6. Label and its corresponding target comparison table
| Label | airport | airplane_mh | airplane_z | airplane_zs | airplane_y | bridge | oiltank |
|---|
| Object | Airport | Civil aircraft | Fighter | Helicopter | Transport | Bridge | Oil tank |
|
查看原文
表 7算法步骤
Table7. Algorithm steps
| Algorithm steps |
|---|
| Step 1: Train the region proposal network separately, initialize the weights by the pre-trained model, and adjust the parameters in an end-to-end manner to give a proposal region.Step 2: Train the detection network separately. The region area for training comes from Step1. The weights are initialized using a pre-trained model.Step 3: Use the parameters of the Step2 detection model to initialize the regional proposal network while fixing the convolutional layer, and adjust only the regional proposal network parameters.Step 4: Use the proposal area output from Step3 as the input to the detection network, while keeping the shared convolutional layer fixed and fine-tune the remaining detection network parameters. |
|
查看原文
表 8各目标测试结果汇总表
Table8. Summary of each target test results
| Object | Airport | Civil aircraft | Helicopter | Fighter | Transport | Oil tank | Bridge |
|---|
| AP /% | 80.8415 | 84.8188 | 70.0974 | 62.1441 | 71.0077 | 73.5869 | 68.7273 |
|
查看原文
表 9机场的检测结果
Table9. Airport test results
查看原文
表 10民航飞机的检测结果
Table10. Civil aviation aircraft test results
查看原文
表 11多类别下的目标检测结果
Table11. Target test results under multiple categories
查看原文
表 12改进方法与原算法的各类目标检测结果对比
Table12. Comparison of various target detection results between improved method and original algorithm
| Method | AP /% | Meantime /s |
|---|
| Airport | Civil aircraft | Helicopter | Fighter | Transport | Oil tank | Bridge |
|---|
| Faster R-CNN | 76.66 | 80.56 | 66.82 | 58.62 | 67.56 | 69.02 | 64.85 | 0.142 | | Proposed | 80.84 | 84.82 | 70.10 | 62.14 | 71.01 | 73.59 | 68.73 | 0.145 |
|
查看原文
表 13不同检测方法的结果对比
Table13. Comparison of results of different detection methods
| Object | Method | AP /% | Mean time /s |
|---|
| Ref. [19] | 76.73 | 6.87 | | Civilaircraft | Faster R-CNN | 80.56 | 0.142 | | Proposed | 84.82 | 0.145 | | Ref. [7] | 72.78 | 20.86 | | Airport | Faster R-CNN | 76.66 | 0.142 | | Proposed | 80.84 | 0.145 |
|
查看原文
韩永赛, 马时平, 李帅, 何林远, 朱明明. 基于优化区域卷积神经网络的机场区域检测[J]. 激光与光电子学进展, 2020, 57(10): 101021. Yongsai Han, Shiping Ma, Shuai Li, Linyuan He, Mingming Zhu. Airport Area Detection Based on Optimized Regional Convolutional Neural Network[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101021.














 PDF全文
PDF全文

