三维点云场景数据获取及其场景理解关键技术综述  下载: 2400次
下载: 2400次
3D Point Cloud Scene Data Acquisition and Its Key Technologies for Scene Understanding
1 东北大学信息科学与工程学院, 辽宁 沈阳 110819
2 河北交通职业技术学院电气与信息工程系, 河北 石家庄 050091
3 北京师范大学遥感科学国家重点实验室, 北京 100875
图 & 表
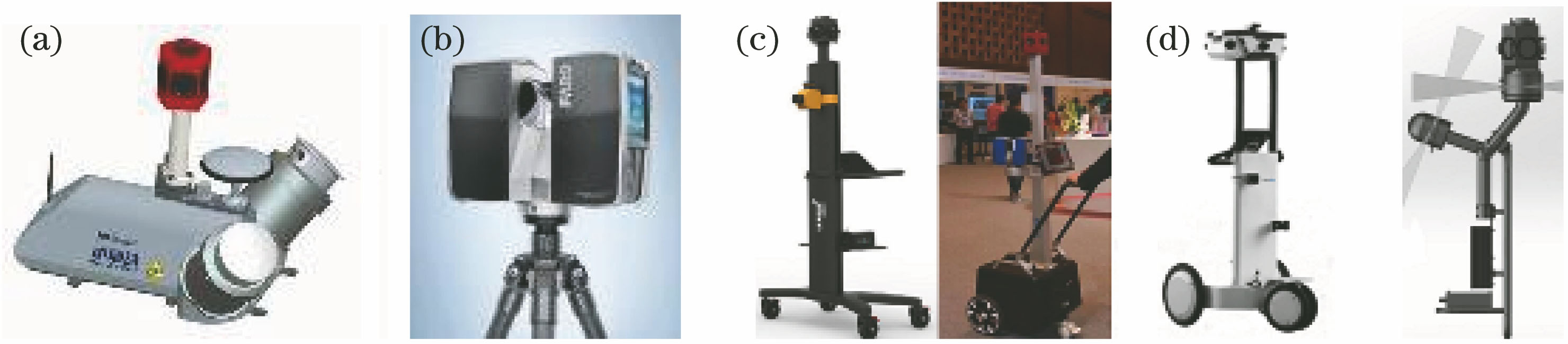
图 1. 3D数据采集系统。(a)车载系统;(b)固定式扫描仪;(c)手推车式采集系统;(d)背负式采集系统
Fig. 1. Three-dimensional data acquisition systems. (a) Vehicle system; (b) fixed scanner; (c) trolley type acquisition system; (d) backpack type acquisition system
下载图片 查看原文
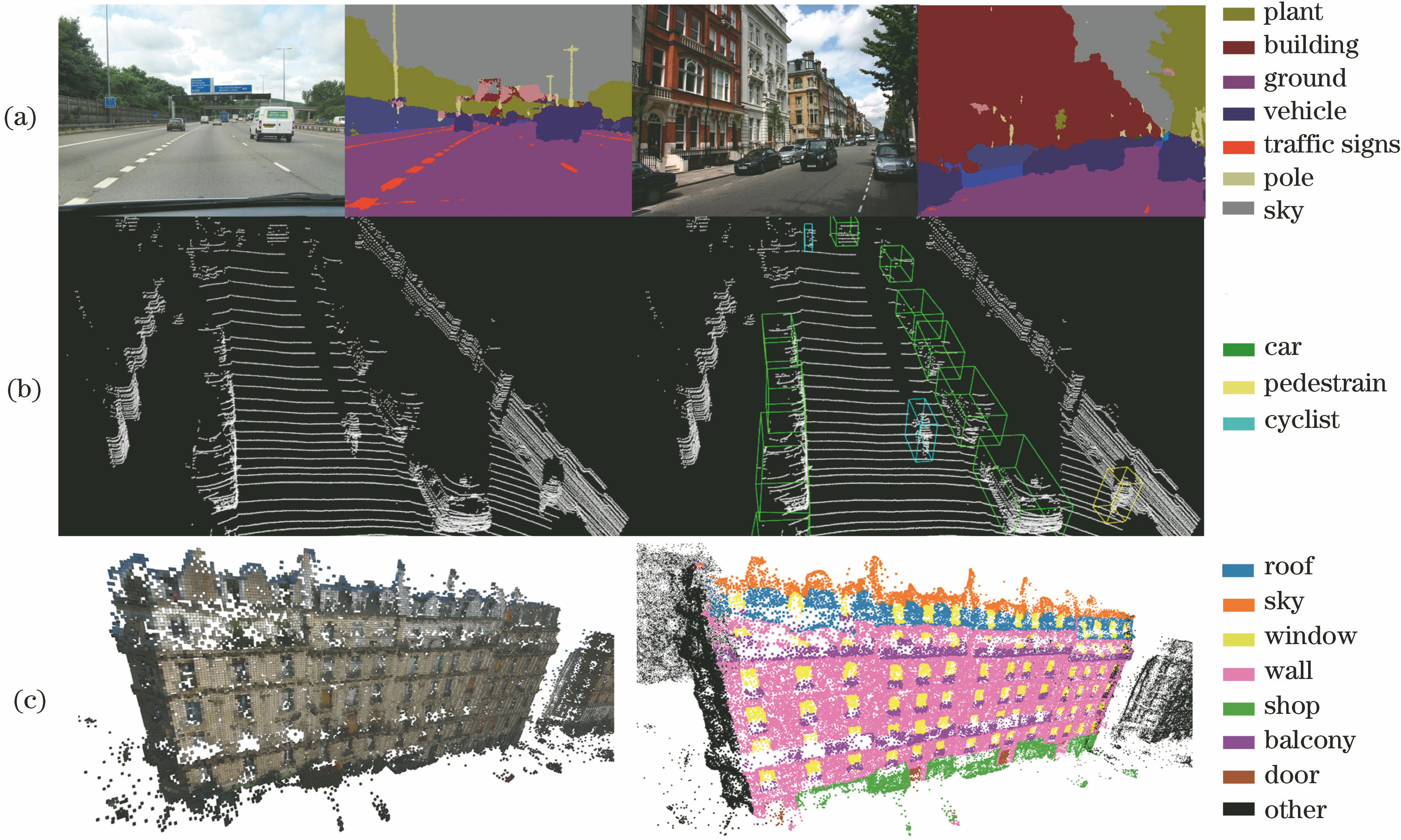
图 2. 场景理解示例。(a)图像语义分割;(b)点云目标检测;(c)点云语义分割
Fig. 2. Examples of scene understanding. (a) Semantic segmentation of image; (b) target detection of point cloud; (c) semantic segmentation of point cloud
下载图片 查看原文
图 3. 2D图像受环境因素影响示例。(a)目标严重遮挡;(b) a图语义分割结果;(c)目标受光照影响;(d) c图语义分割结果
Fig. 3. Examples of 2D images affected by environmental factors. (a) Severe occlusion of target; (b) semantic segmentation of (a); (c) target affected by light; (d) semantic segmentation of (c)
下载图片 查看原文
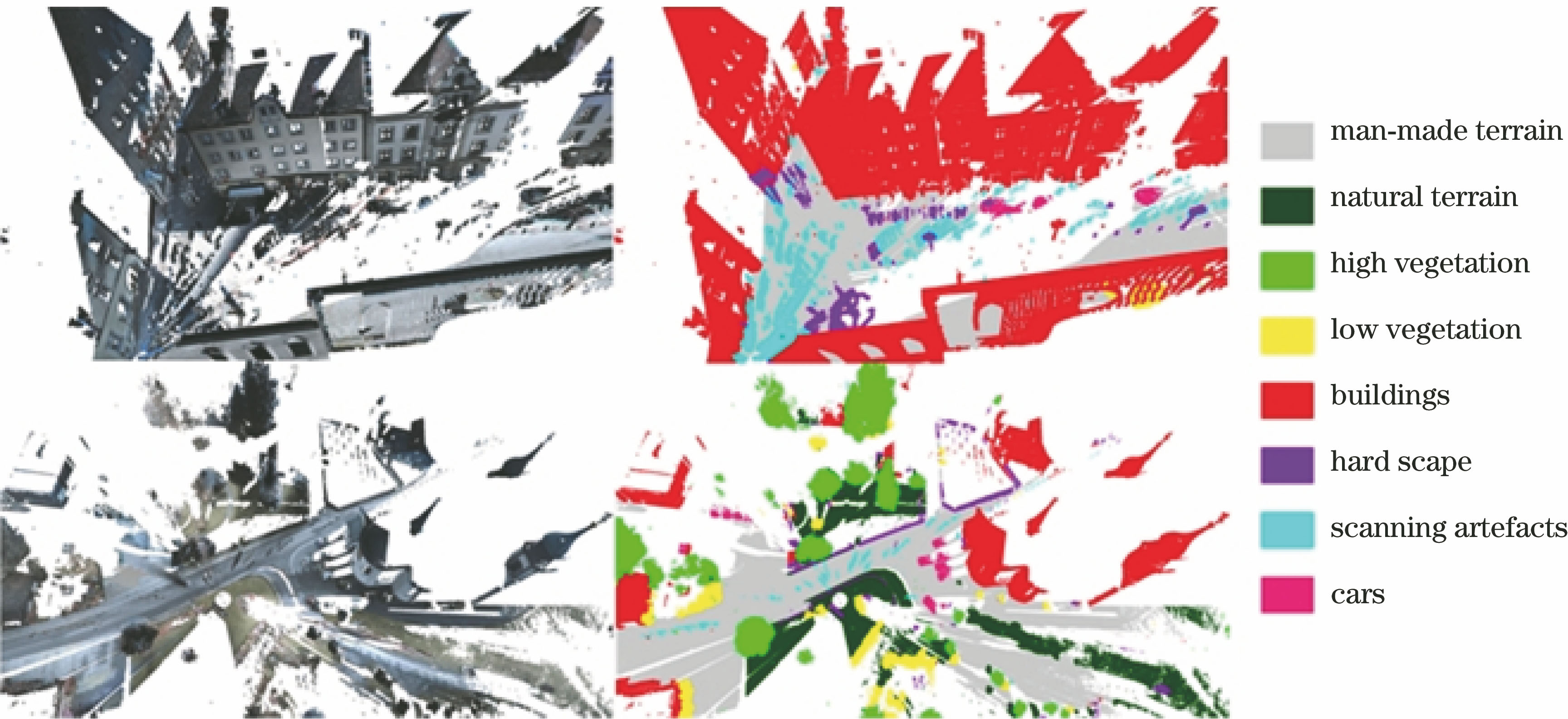
图 4. 3D彩色点云室外场景语义分割
Fig. 4. Semantic segmentation of semantic 3D color point cloud of outdoor scene
下载图片 查看原文
图 5. 小区彩色点云图像
Fig. 5. Color point cloud image of community
下载图片 查看原文
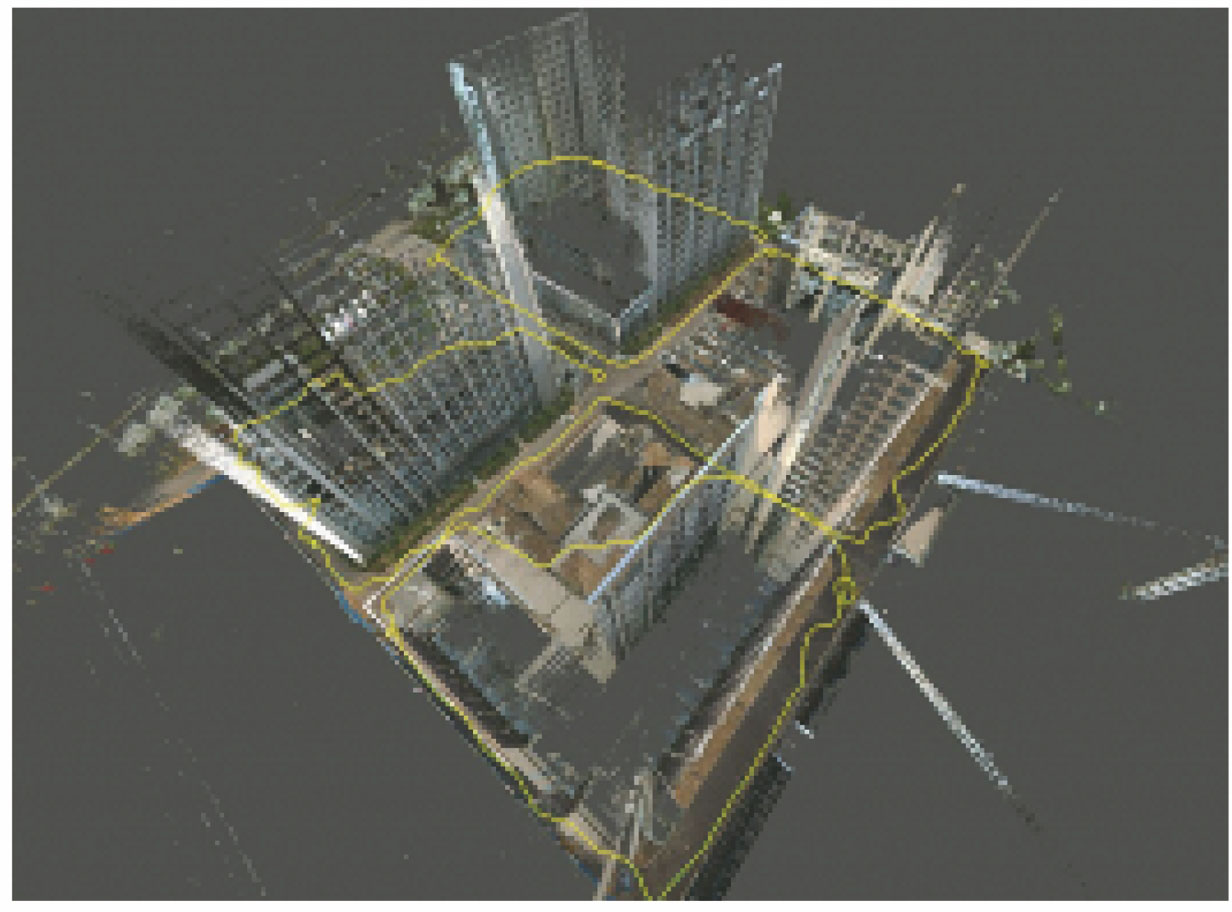
图 6. 背负式全景影像移动轨迹(黄色线条)
Fig. 6. Trajectory (yellow lines) of collision-based panorama image
下载图片 查看原文
图 7. 室外场景的完整彩色点云
Fig. 7. Complete colorful point cloud of outdoor scene
下载图片 查看原文
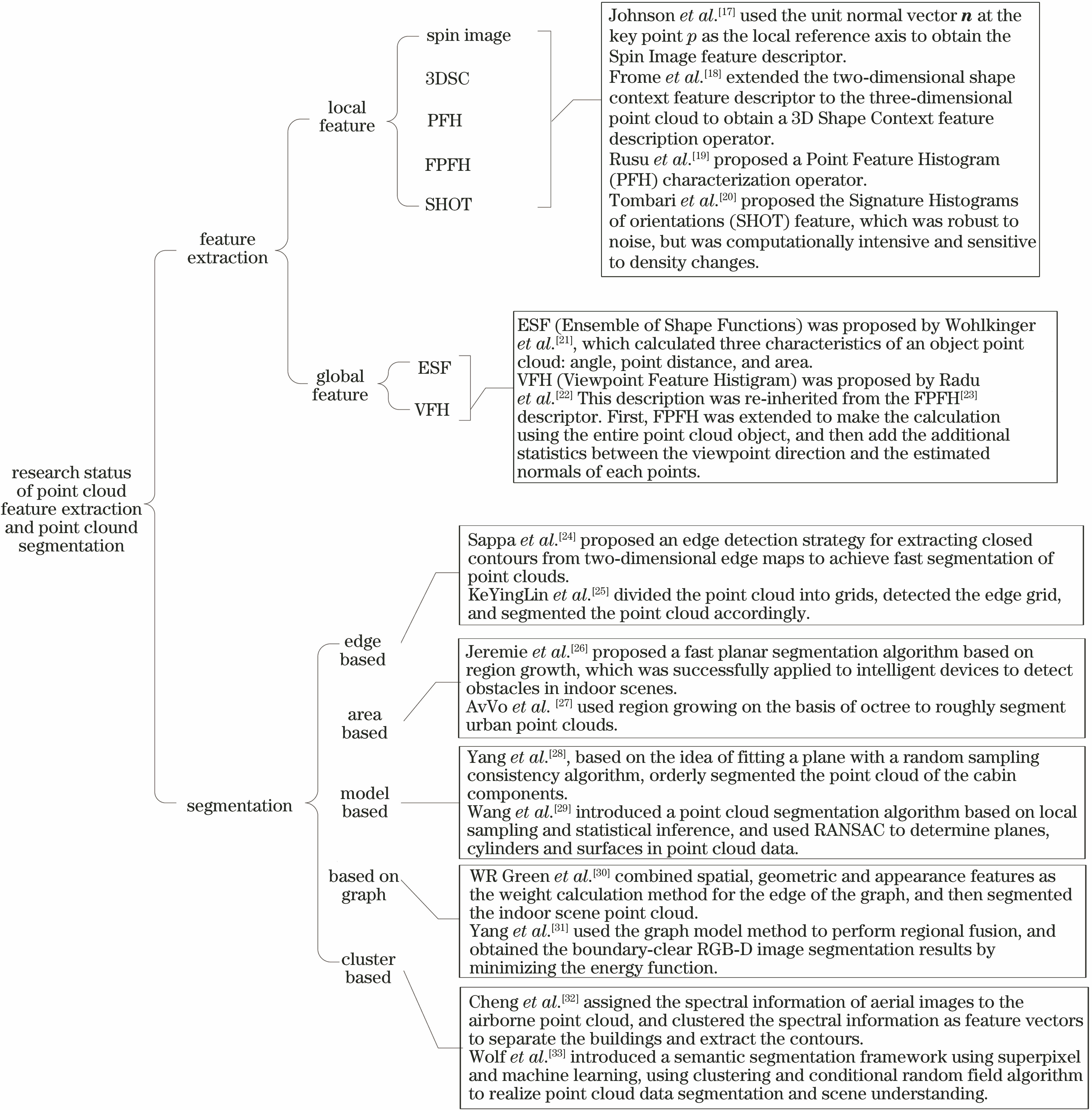
图 8. 点云特征提取及点云分割研究现状
Fig. 8. Research status of point cloud feature extraction and point cloud segmentation
下载图片 查看原文
表 1场景理解不同数据的优缺点对比
Table1. Comparison of advantages and disadvantages of different data in scenario
| Name | Instance | Advantage characteristic | Disadvantage |
|---|
| 2D RGB image | | 2D information,color textures, etc. | Image is susceptible toillumination, lacks depthinformation, cannot directlyacquire geometric information. | | Point cloud databased on image3D reconstruction | | 3D scenes, color textures andother sparse point clouds,with depth information, distance. | Point cloud is susceptible tolight and environment, andreconstruction information is lost. | | Kinect-basedRGB-D pointcloud data | | 3D indoor small scene, densepoint cloud, only for closerange, with depth. | Point cloud is susceptible tolight, only for indoor scenes,small field of view. | | Point cloud databased onvehicle lidar | | High-precision, dense point clouds,and three-dimensional spatialinformation and intensity information.Less affected by environmental factors. | Limited by platform, only point cloudscenes with linear road trajectoriescan be generated. Unable to extractscene color. information | | Point cloud databased onstatic lidar | | 3D outdoor scene, high-precision,dense point cloud, 3D spatialinformation and intensity. | Collection device cannot bemoved, and point cloudscene is incomplete. | | Point cloud databased onaerial lidar | | 3D outdoor scene, high-precisioninformation, sparse point cloud,suitable for large-scalerough modeling. | Unable to reproduce ground details,laser radar cannot extractscene color information. | | Collision-basedpanoramic imageand laser pointcloud fusion data | | 3D outdoor scenes, high-precisioninformation, dense point clouds,mobile modeling, full-frame3D space, color and intensity. | Scene color informationcannot be extracted by thelaser point cloud alone. |
|
查看原文
表 2噪声点的滤波方法比较
Table2. Comparison of noise filtering methods
| Name | Principle | Characteristic |
|---|
| Throughfilter | According to point cloud, threshold should be set inrange of X, Y, and Z axes, and then threshold isfiltered to remove points that are out of range. | Fast, but not accurate enough,mostly used for rough processingin the first step. | | Statisticalfiltering | Noise point is removed according to point density.The denser the points at certain area, the larger theamount of information. The noise information is useless,and amount of information is small. By calculating averagedistance of each point to its nearest k points,Gaussian distribution of distances of all pointsin point cloud is obtained to eliminate noise. | The effect is better than the pass-throughfilter, which can accurately filter out noisepoints inside bounding box. | | Radiusfiltering | Given a radius threshold, calculate the number ofpoints in its radius for each point in the point cloud.When the number is greater than a given number ofthresholds, point is retained, otherwise point istaken as a noise point and rejected. | Filter out noise points insidebounding box at a faster rate. |
|
查看原文
表 3地面滤波方法比较
Table3. Comparison of ground filter methods
| Name | Principle | Characteristic |
|---|
| Elevation basedfiltering method | According to point distribution filtering in point cloud,manually set or adaptively find z-direction threshold,and filter out point where z-value is less than thresholdin point cloud as ground. | Fast, low robustness. | | Model basedfiltering method | Select a model to fit ground (such as RANSAC-basedplanar model, CSF cloth simulation) and usefitted inner point as ground point. | The algorithm is suitable forspecific environments, and the robustness ispoor, but the filtering effect is relatively good. | | Filtering methodbased onregion growing | Taking normal vector direction of point as criterion forregional growth, first adaptively find the point that ismost likely to be the ground. Based on this, based onangular difference between normal vector direction of itsneighborhood point and its normal vector direction, it isjudged whether it grows or not. Continuous iteration tofind all ground points. | When the ground is not undulating,the algorithm can separate the ground well,but the time and space cost are relatively large. | | Method based onwindow movement | Points distributed on ground should be of a continuousnature. Set a suitable window size to find the lowestpoint in current window. Then set threshold by thelowest point calculation model and filter out all pointswhere elevation difference exceeds threshold. | Faster, but the window size is toodependent on manual settings, andonly local features are considered. | | Triangulationbased filteringmethod | The discrete points are connected according to a certainrule into a plurality of triangles covering entire areawithout overlapping each other to form an irregulartriangular network. The sparse TIN is generated by theseed point, and slope of model is analyzed to performinitial segmentation, and slope is eliminated. Largetriangular regions, and then through connectivityanalysis to obtain features such as elevationdifferences for each segment. | It avoids data redundancy when terrain isflat, but data structure is complexand space complexity is high. |
|
查看原文
表 4常用的点云特征描述方法及比较
Table4. Common methods and comparison of point cloud feature descriptions
| Name | Type | Principle | Characteristic |
|---|
| Spinimage | Localfeature | Count projection coordinates of allvertices to base plane to obtain descriptor. | Resistance to rigid transformationand background interference;sensitive to density changes. | | 3DSC | Localfeature | Counting number of points in different grids ofspherical neighborhoods to obtain descriptors. | Strong discrimination, anti-noise. | | PFH | Localfeature | Parameterize the spatial difference between pointand neighborhood and form a multi-bit histogram. | Highly robust to point cloud densitychanges; high computational complexity. | | FPFH | Localfeature | Recalculate K neighborhood by calculatingtuple of the query point and its neighborscompared to the PFH. | Retains most of recognition capabilitiesof PFH, and reduces computationalcomplexity compared to PFH. | | SHOT | Localfeature | Spherical neighborhood rasterization, construct ahistogram according to the angle of normal vector,and then concatenate histogram. | Descriptive, anti-noise;large amount of calculation,sensitive to density changes. | | ESF | Globalfeature | Describe angle, distance, and triangle area ofthree random points in a point cloud. | No need for pre-processing,strong feature description. | | VFH | Globalfeature | Add pilot direction to relative normalcalculation after extending FPFH. | Strongly discernible. |
|
查看原文
李勇, 佟国峰, 杨景超, 张立强, 彭浩, 高华帅. 三维点云场景数据获取及其场景理解关键技术综述[J]. 激光与光电子学进展, 2019, 56(4): 040002. Yong Li, Guofeng Tong, Jingchao Yang, Liqiang Zhang, Hao Peng, Huashuai Gao. 3D Point Cloud Scene Data Acquisition and Its Key Technologies for Scene Understanding[J]. Laser & Optoelectronics Progress, 2019, 56(4): 040002.






 PDF全文
PDF全文

