Chinese Optics Letters, 2016, 14 (10): 102301, Published Online: Aug. 2, 2018
Indoor multi-robot intelligent coordination based on omni-directional visible light communication  Download: 931次
Download: 931次
Figures & Tables
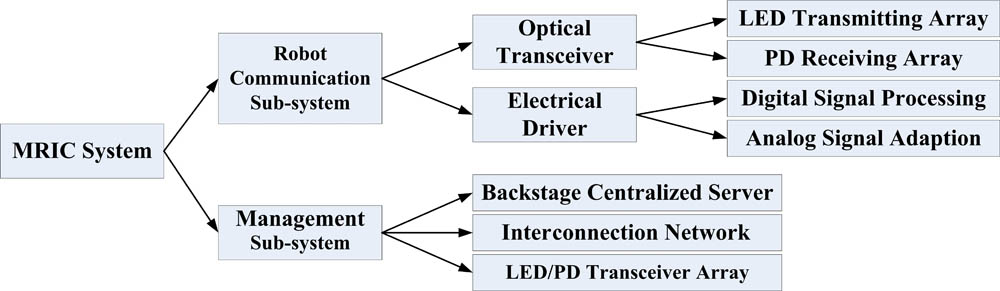

Fig. 3. (a) Measurement on the FOV of PD chips. (b) PD arrays for circumferential receiving: triangle-arranged S1337 array, square-arranged S1226 array, and hexagon-arranged S6968 array (Hamamatsu).





Fig. 8. Performance of the circumferential VLC channel. (Cir. = circumferential Chan. = circumferential


Zhitong Huang, Cao Yan, Ke Wu, Yuefeng Ji. Indoor multi-robot intelligent coordination based on omni-directional visible light communication[J]. Chinese Optics Letters, 2016, 14(10): 102301.



 PDF全文
PDF全文

