基于隐马尔可夫模型的可见光与惯导融合室内定位系统  下载: 1053次
下载: 1053次
Visible Light and Inertial Navigation Fusion Indoor Positioning System Based on Hidden Markov Model
1 重庆邮电大学工业物联网与网络化控制教育部重点实验室, 重庆 400065
2 重庆邮电大学光纤通信技术重点实验室, 重庆 400065
图 & 表
图 1. 室内定位指纹地图
Fig. 1. Indoor positioning fingerprint map
下载图片 查看原文
图 2. HMM示意图
Fig. 2. Diagram of HMM
下载图片 查看原文
图 3. 用户最大速度限制候选集示意图
Fig. 3. Diagram of candidate set of user maximum speed limit
下载图片 查看原文
图 4. 用户最大速度下维特比算法示意图。(a)传统维特比算法;(b)改进的维特比算法
Fig. 4. Schematic diagrams of Viterbi algorithm based on user maximum speed. (a) Traditional Viterbi algorithm; (b) improved Viterbi algorithm
下载图片 查看原文
图 5. 融合定位算法流程图
Fig. 5. Flow chart of fusion positioning algorithm
下载图片 查看原文
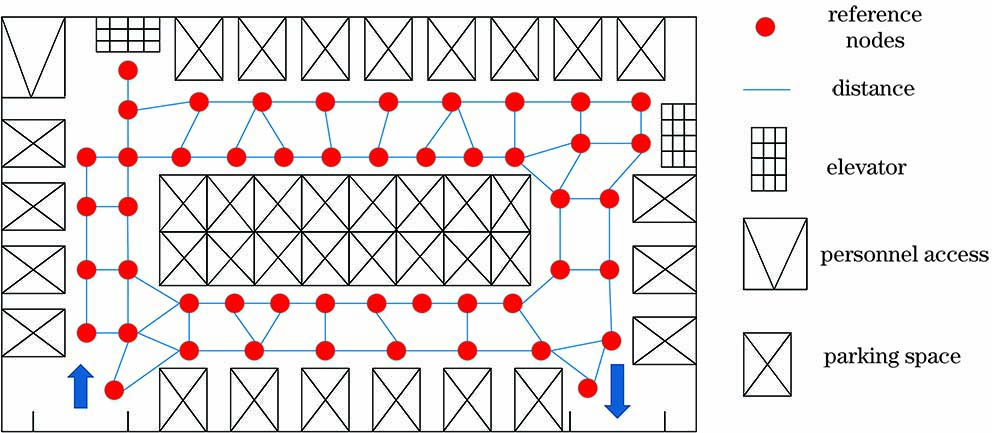
图 6. 室内停车场指纹地图
Fig. 6. Fingerprint map of indoor parking lot
下载图片 查看原文
图 7. 室内停车场实验轨迹图
Fig. 7. Experimental trajectory of indoor parking lot
下载图片 查看原文
图 8. 误差累积分布函数
Fig. 8. Cumulative error distribution function
下载图片 查看原文
图 9. 4种算法的定位轨迹图。(a)基于卡尔曼滤波的VLC与PDR融合定位轨迹图;(b)可见光指纹定位轨迹图;(c)传统HMM可见光定位轨迹图;(d)惯性导航定位轨迹图
Fig. 9. Positioning track maps of four contrast algorithms. (a) Kalman filter based VLC and PDR fusion location trajectory map; (b) visible light fingerprint positioning trajectory; (c) traditional HMM VLC positioning trajectory; (d) inertial navigation positioning trajectory
下载图片 查看原文
图 10. 对比算法的定位误差累积分布函数图
Fig. 10. CDF of positioning error of compared algorithms
下载图片 查看原文
图 11. 不同数量候选节点对应的定位误差图
Fig. 11. Location error graph corresponding to different numbers of candidate nodes
下载图片 查看原文
表 1仿真参数
Table1. Simulation parameters
| Symbol | Parameter | Value |
|---|
| Room size /m2 | 2500 | | Receiving height /m | 1 | | LED height /m | 4 | | Number of LEDs in each lamp | 26 | | Transmitted power of lamp /W | 5-10 | | Gain of optical filter | 1 | | Gain of optical concentrator | 1 | | Field-of-view /(°) | 55 | | Physical area of photo-detector /cm2 | 1 | | Number of nodes | 162 | | Maximum speed /(m·s-1) | 5 |
|
查看原文
表 2定位误差统计
Table2. Positioning error statistics
| Number of experiments | Forecast numberof nodes | Accuracy of nodeprediction /% | Maximumerror /m | Minimumerror /m | Averageerror /m | Root meansquare error /m |
|---|
| 10 | 3000 | 82 | 5.1 | 0.6 | 3.85 | 4.42 | | 20 | 6000 | 85 | 5.4 | 0.3 | 3.47 | 3.95 | | 30 | 9000 | 84 | 5.5 | 0.2 | 3.56 | 4.17 |
|
查看原文
表 3对比算法的定位误差统计
Table3. Positioning error statistics of compared algorithms
| Positioningmethod | Maximumerror /m | Minimumerror /m | Averageerror /m | Root meansquare error /m | Medianerror /m |
|---|
| VLCFM[9] | 7.3 | 0.10 | 4.61 | 5.10 | 4.22 | | VLC-HMM | 7.4 | 0.30 | 5.52 | 6.13 | 5.04 | | INPM[10] | 9.6 | 0.05 | 6.62 | 7.14 | 5.56 | | KF VLC-IN[11] | 6.5 | 0.60 | 4.27 | 4.85 | 3.74 | | Proposed method | 5.5 | 0.20 | 3.35 | 3.88 | 2.92 |
|
查看原文
陈勇, 巫杰, 刘焕淋, 郑瀚. 基于隐马尔可夫模型的可见光与惯导融合室内定位系统[J]. 中国激光, 2020, 47(12): 1206001. Chen Yong, Wu Jie, Liu Huanlin, Zheng Han. Visible Light and Inertial Navigation Fusion Indoor Positioning System Based on Hidden Markov Model[J]. Chinese Journal of Lasers, 2020, 47(12): 1206001.













 PDF全文
PDF全文

