基于优化YOLOv3的低空无人机检测识别方法  下载: 1394次
下载: 1394次
Low-Altitude UAV Detection and Recognition Method Based on Optimized YOLOv3
1 国防科学技术大学电子对抗学院脉冲功率激光技术国家重点实验室, 安徽 合肥 230037
2 国防科学技术大学, 安徽 合肥 230037
图 & 表
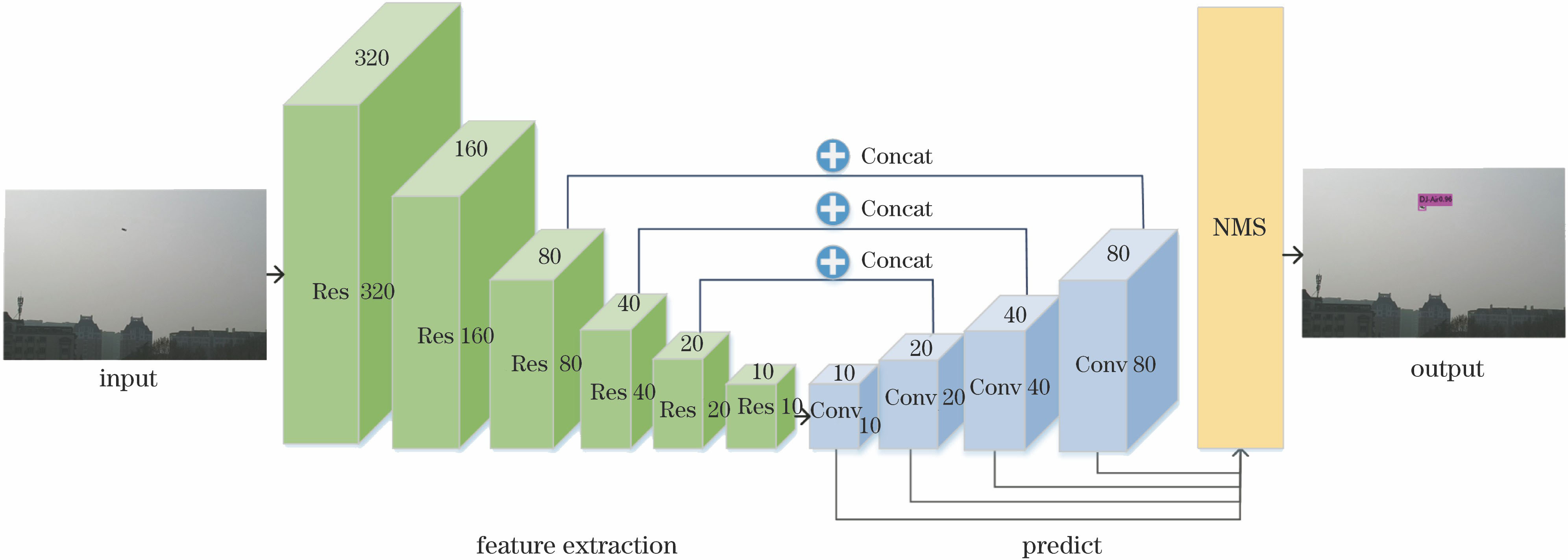
图 1. 用于低空无人机的检测识别结构图
Fig. 1. Structural diagram of detection and recognition for low-altitude UAV
下载图片 查看原文
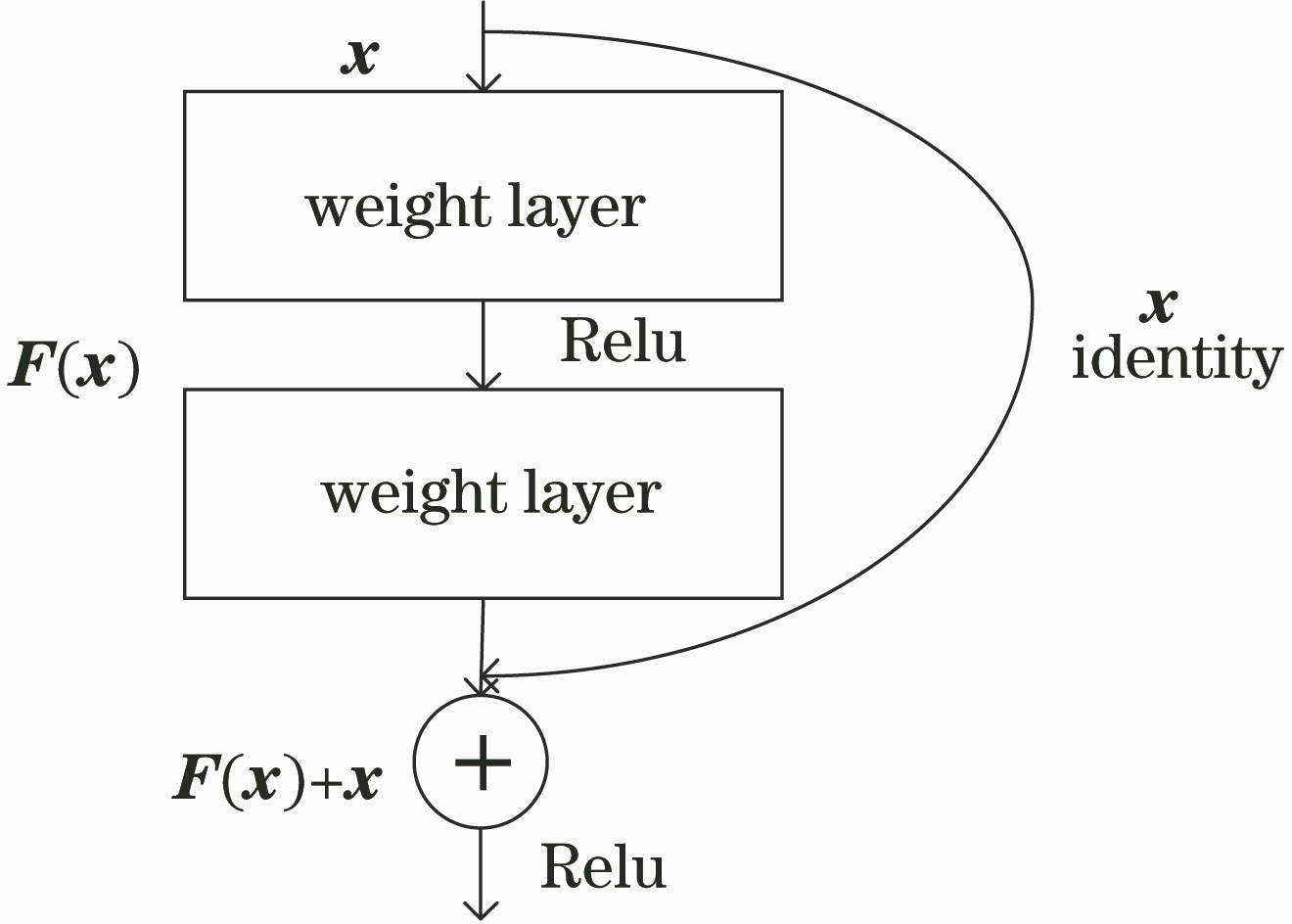
图 2. 残差块结构图
Fig. 2. Residual block structural diagram
下载图片 查看原文
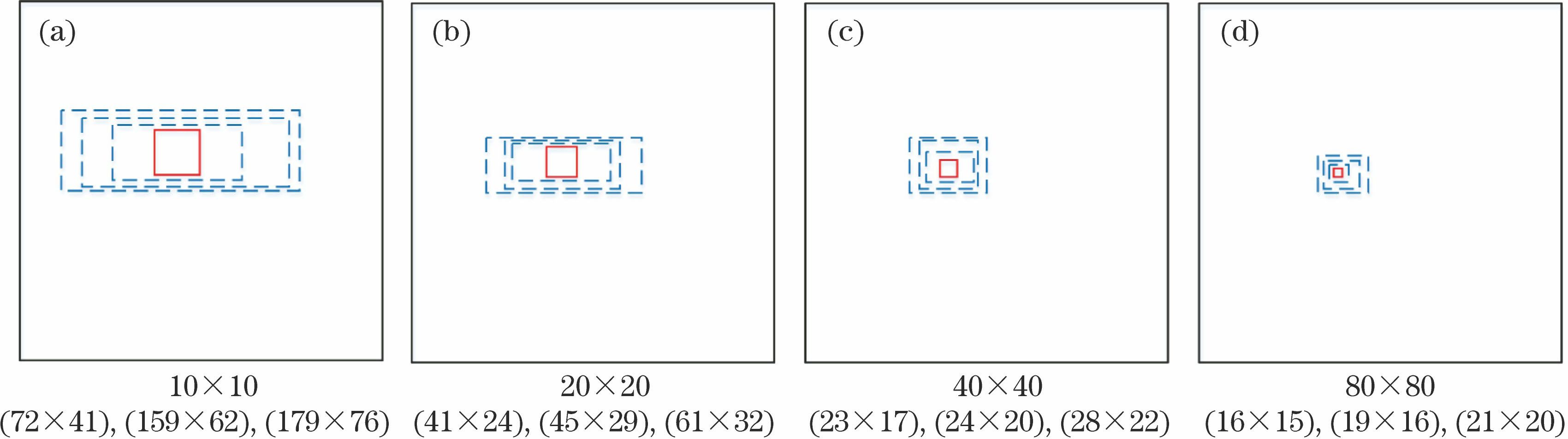
图 3. 4种尺度的12个锚点示意图。在每一种尺度下,实线框为一个对应的方格,虚线框为对应的锚点框。(a) 10×10;(b) 20×20;(c) 40×40;(d) 80×80
Fig. 3. Diagrams of 12 anchors with 4 scales. At each scale, the solid box is a corresponding square, and the dotted boxes are the corresponding anchor boxes. (a) 10×10; (b) 20×20; (c) 40×40; (d) 80×80
下载图片 查看原文
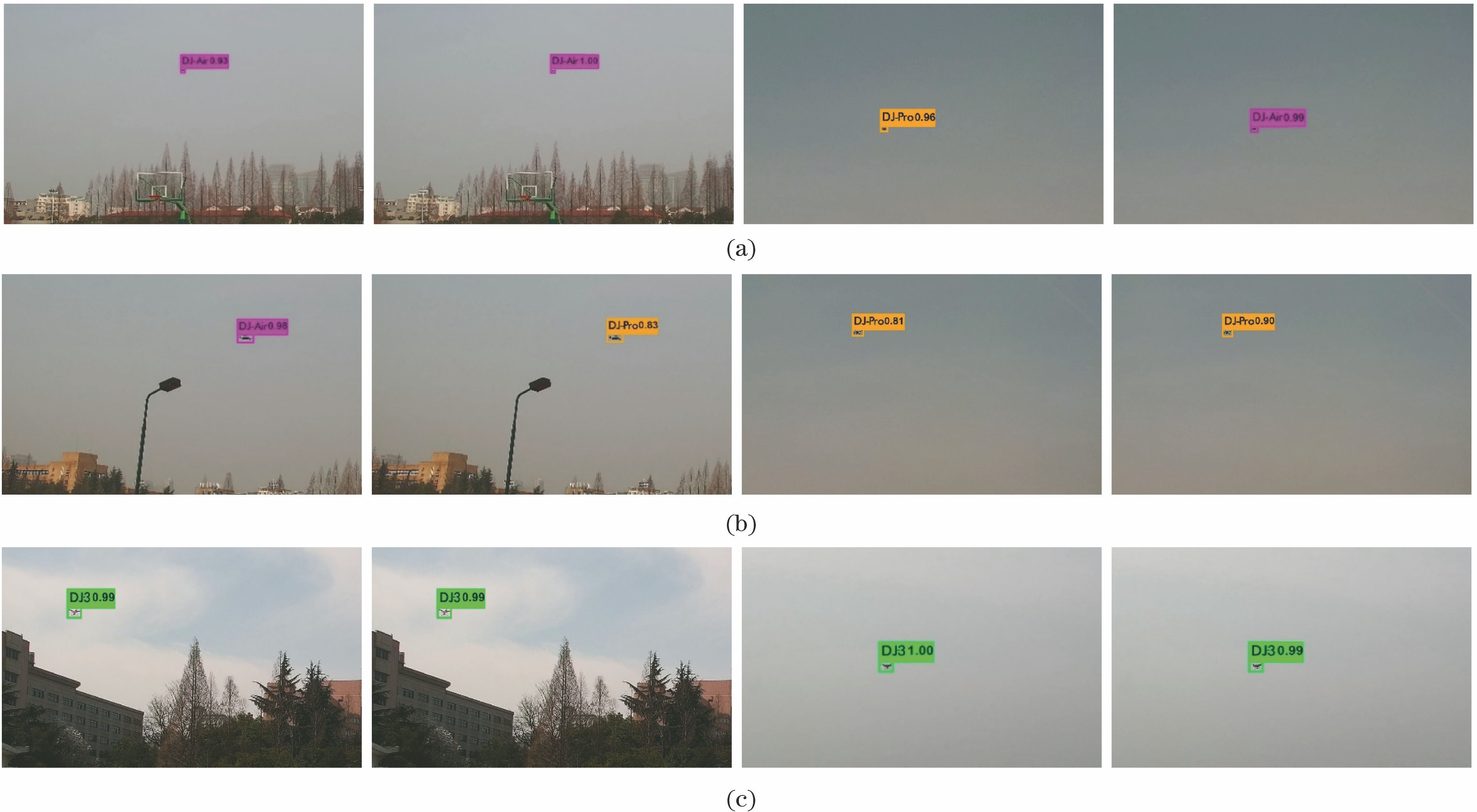
图 4. 测试集中部分检测结果对比图(第1列和第3列为YOLOv3方法,第2列和第4列为O-YOLOv3方法)。(a) DJ-Air;(b) DJ-Pro;(c) DJ-3
Fig. 4. Comparison of partial detection resultson test dataset (The first and third columns are the results of the YOLOv3 method, and the second and fourth columns are the results of the O-YOLOv3 method). (a) DJ-Air; (b) DJ-Pro; (c) DJ-3
下载图片 查看原文
表 1用于低空无人机检测识别的O-YOLO网络结构
Table1. O-YOLO network structure for detection and recognition of low altitude UAV
| Repetition times | Type | Filters | Size | Output |
|---|
| Convolutional | 16 | 3×3 | 640×640×16 | | Convolutional | 32 | 3×3/2 | 320×320×32 | | Convolutional | 16 | 1×1 | | | 1× | Convolutional | 32 | 3×3 | | | Residual | | | 320×320×32 | | Convolutional | 64 | 3×3/2 | 160×160×64 | | Convolutional | 32 | 1×1 | | | 2× | Convolutional | 64 | 3×3 | | | Residual | | | 160×160×64 | | 1× | Convolutional | 128 | 3×3/2 | 80×80×128 | | Convolutional | 64 | 1×1 | | | 8× | Convolutional | 128 | 3×3 | | | Residual | | | 80×80×128 | | Convolutional | 256 | 3×3/2 | 40×40×256 | | Convolutional | 128 | 1×1 | | | 8× | Convolutional | 256 | 3×3 | | | Residual | | | 40×40×256 | | 1× | Convolutional | 512 | 3×3/2 | 20×20×512 | | Convolutional | 256 | 1×1 | | | 4× | Convolutional | 512 | 3×3 | | | Residual | | | 20×20×512 | | 1× | Convolutional | 1024 | 3×3/2 | 10×10×1024 | | Convolutional | 512 | 1×1 | | | 4× | Convolutional | 1024 | 3×3 | | | Residual | | | 10×10×1024 | | Avgpool | | Global | | | 1× | Connected | | 3 | | | Softmax | | | |
|
查看原文
表 2不同训练集的处理方式及样本数
Table2. Processing methods and sample numbers for different train datasets
| Traindataset | Processing method | Numberof samples |
|---|
| UAV_A | Original | 2400 | | UAV_B | Original + Image enhancement | 4800 | | UAV_C | Original + Image enhancement +Data augmentation | 46000 |
|
查看原文
表 3不同方法在不同测试集上的评价结果
Table3. Evaluation results of different methods on different test datasets
| Train set | Method | Detection speed /s-1 | mAP /% | AP /% |
|---|
| DJ-Air | DJ-Pro | DJ-3 |
|---|
| UAV_A | YOLOv3 | 30.28 | 70.11 | 64.14 | 60.62 | 85.57 | | O-YOLOv3 | 26.13 | 77.87 | 73.86 | 69.12 | 90.63 | | UAV_B | YOLOv3 | 29.87 | 71.24 | 64.56 | 62.13 | 87.02 | | O-YOLOv3 | 25.75 | 79.43 | 75.01 | 71.24 | 92.04 | | UAV_C | YOLOv3 | 30.05 | 73.86 | 67.23 | 65.02 | 89.34 | | O-YOLOv3 | 25.85 | 82.15 | 77.86 | 73.25 | 95.33 |
|
查看原文
马旗, 朱斌, 张宏伟, 张杨, 姜雨辰. 基于优化YOLOv3的低空无人机检测识别方法[J]. 激光与光电子学进展, 2019, 56(20): 201006. Qi Ma, Bin Zhu, Hongwei Zhang, Yang Zhang, Yuchen Jiang. Low-Altitude UAV Detection and Recognition Method Based on Optimized YOLOv3[J]. Laser & Optoelectronics Progress, 2019, 56(20): 201006.



 PDF全文
PDF全文

