两轴柔性支承快速反射镜结构控制一体化设计  下载: 539次
下载: 539次
Integrative design of structure control for two-axis fast steering mirror with flexible support
桂林航天工业学院 电子信息与自动化学院,广西 桂林 541004
图 & 表
图 1. 快速反射镜的结构组成
Fig. 1. Structure component of fast steering mirror
下载图片 查看原文
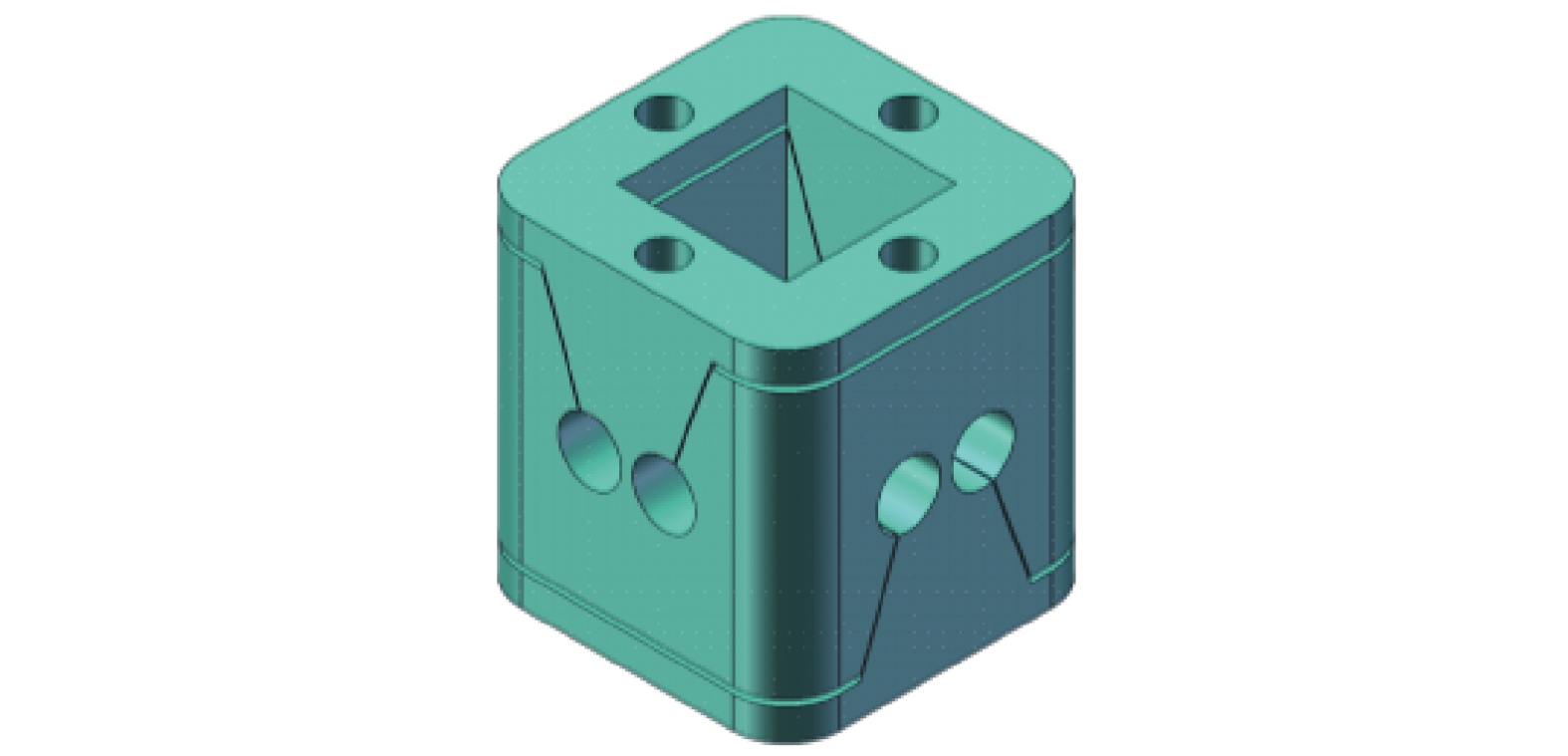
图 2. 柔性支承结构
Fig. 2. Structure of flexible support
下载图片 查看原文
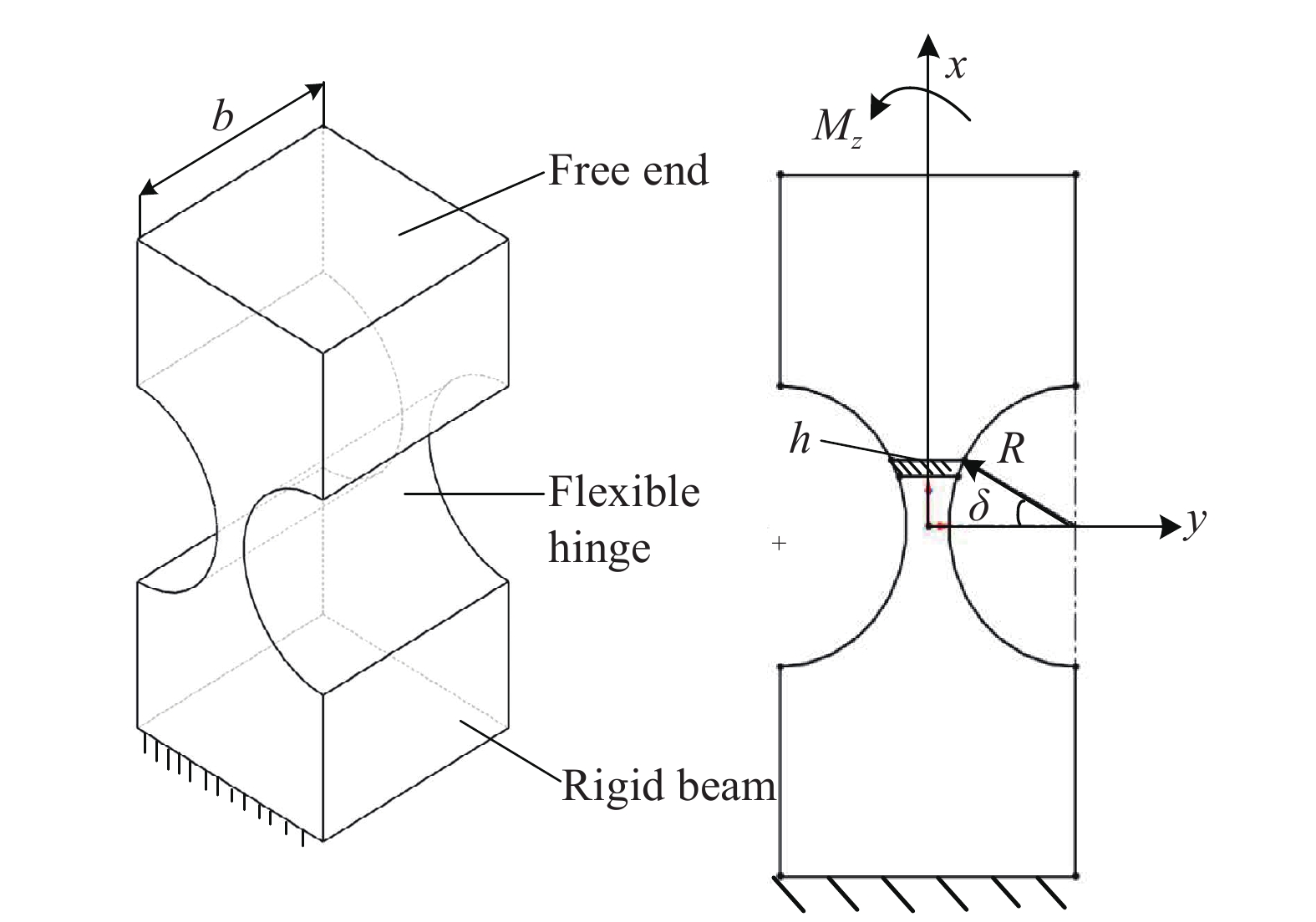
图 3. 柔性铰链结构与受力示意图
Fig. 3. Structure and force diagram of flexible hinge
下载图片 查看原文
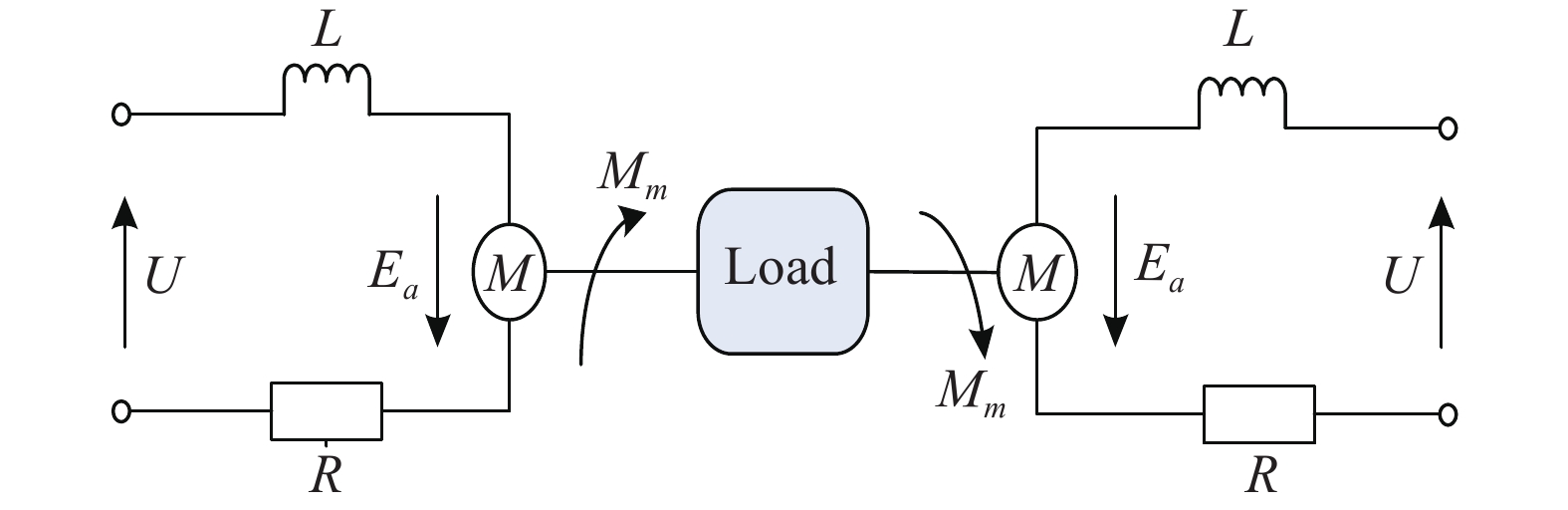
图 4. 音圈电机驱动与负载模型
Fig. 4. Voice coil motor driving and load model
下载图片 查看原文
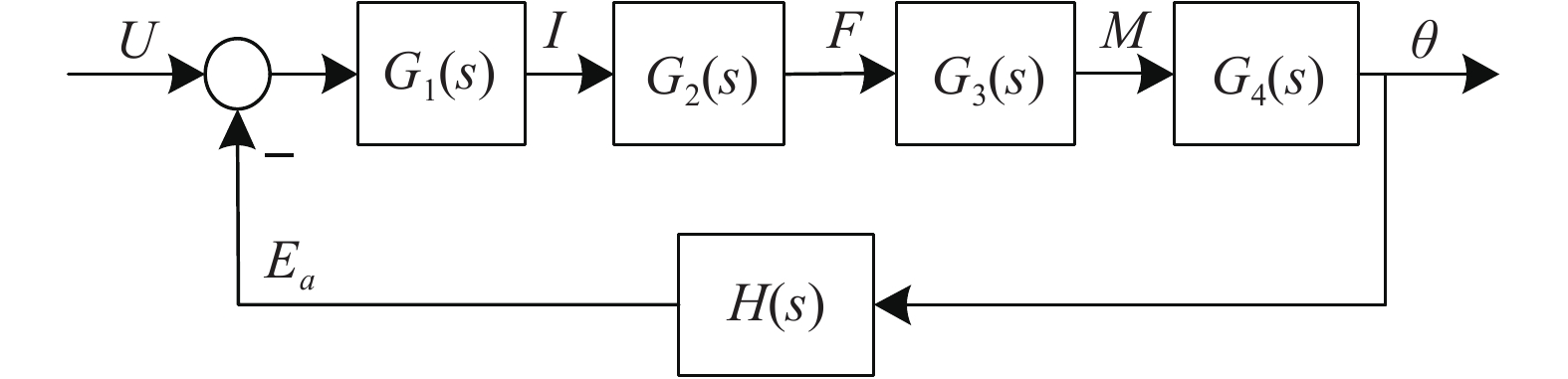
图 5. 快速反射镜开环控制框图
Fig. 5. Open loop control diagram of fast steering mirror
下载图片 查看原文
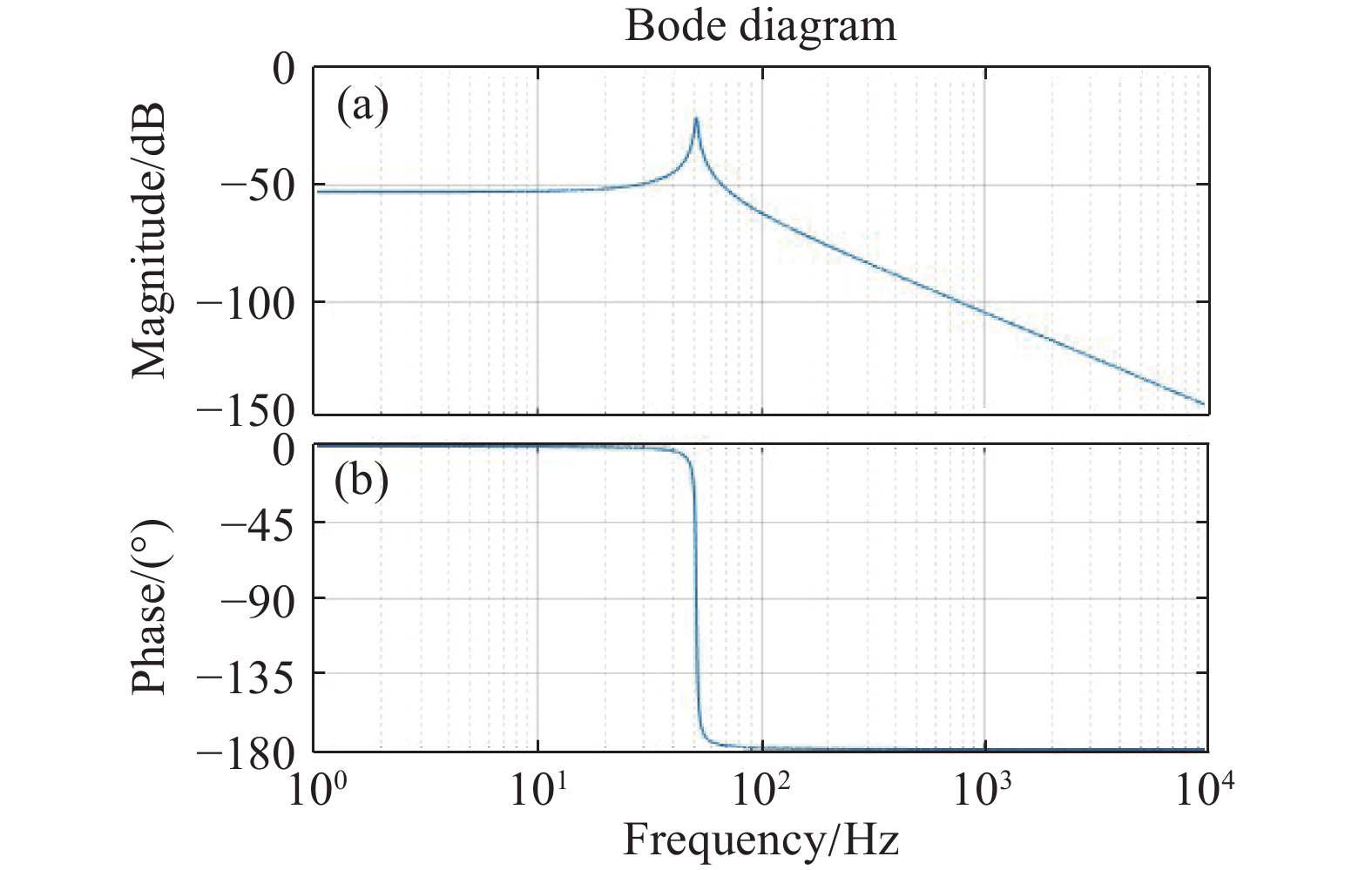
图 6. 音圈电机输出力到反射镜位置转角频率响应特性
Fig. 6. Frequency response characteristics of the output force of voice coil motor to the position of mirror
下载图片 查看原文
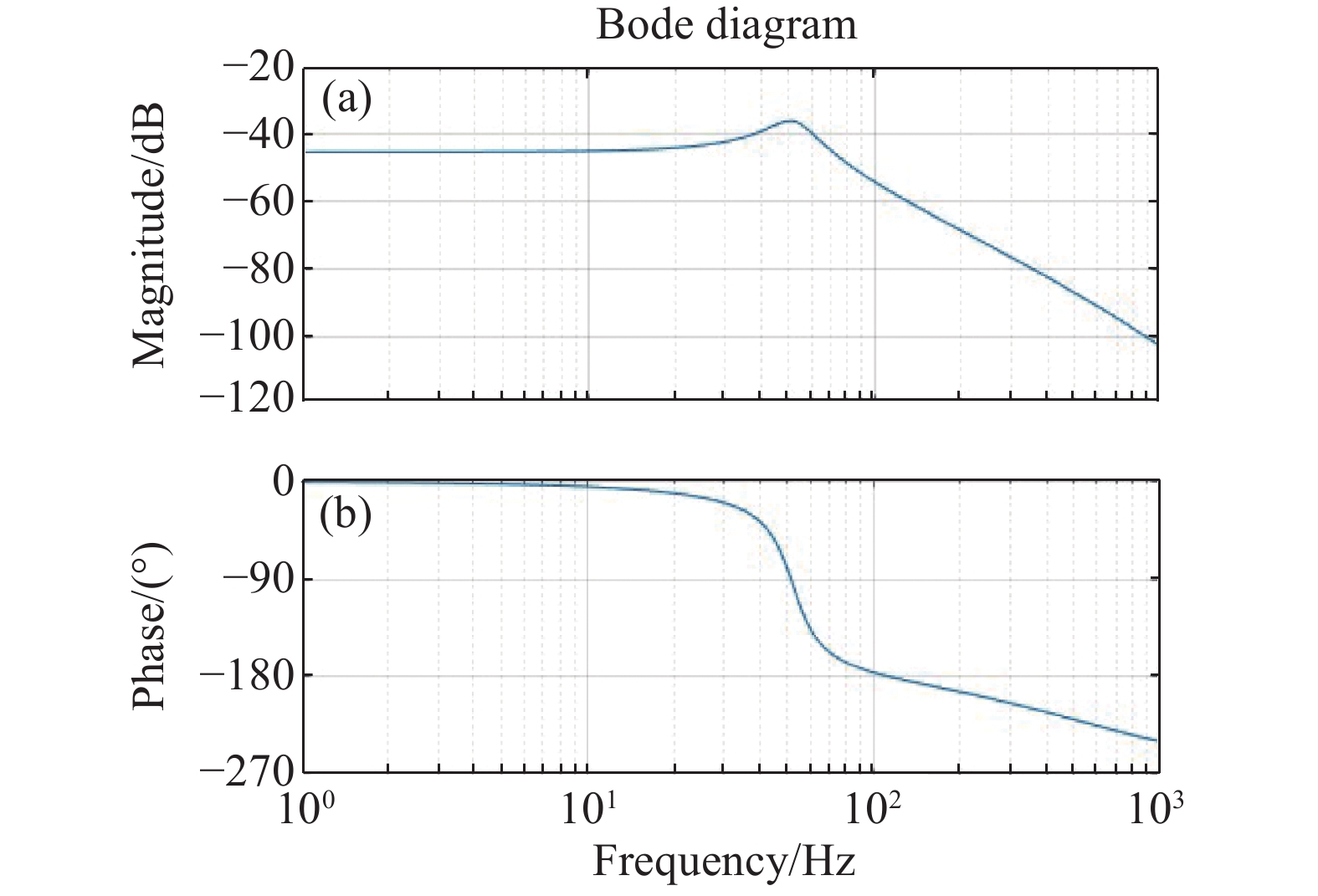
图 7. 开环频率响应特性
Fig. 7. Open-loop frequency response characteristics
下载图片 查看原文
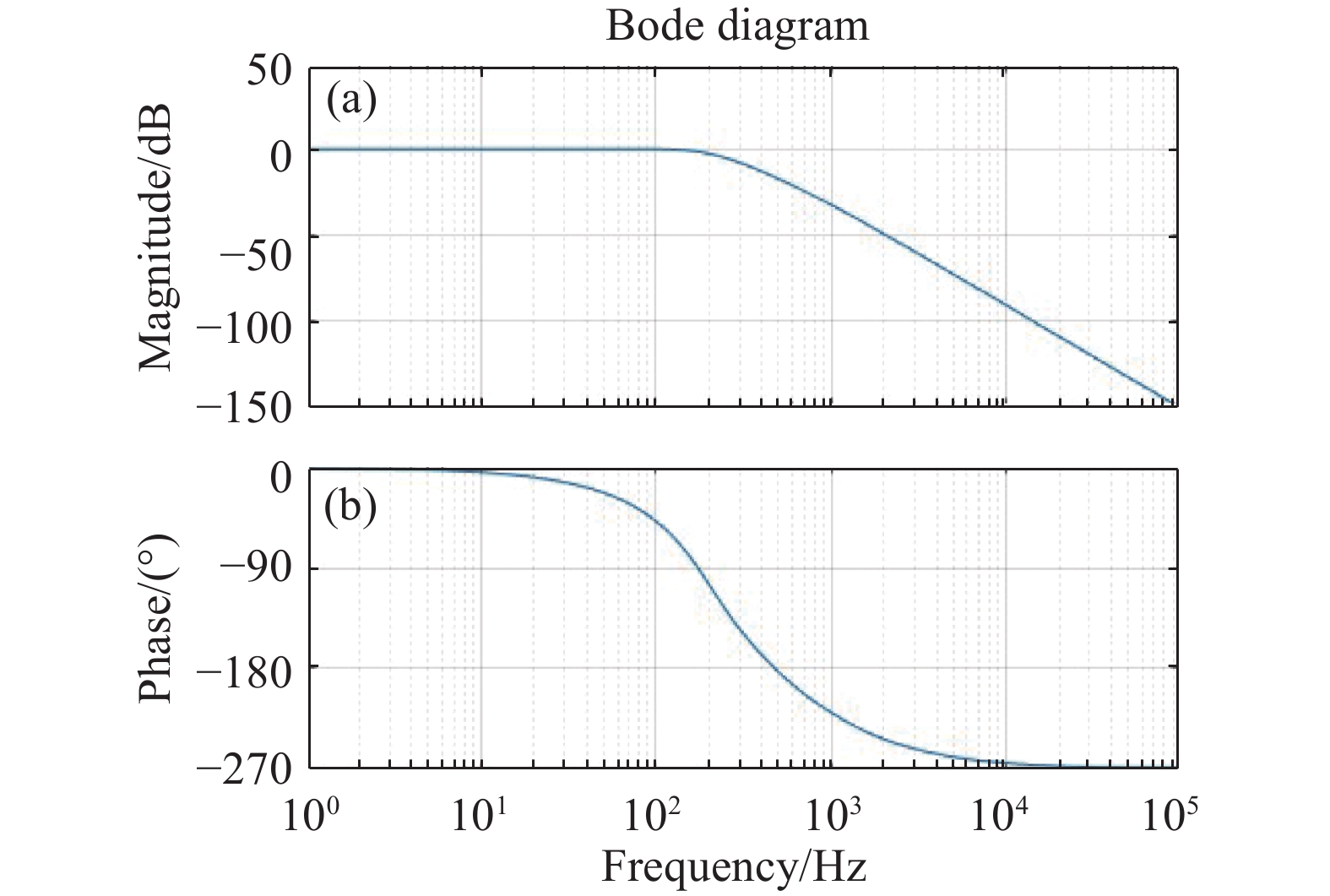
图 8. 闭环控制系统频率响应特性
Fig. 8. Frequency response characteristics of closed loop control system
下载图片 查看原文
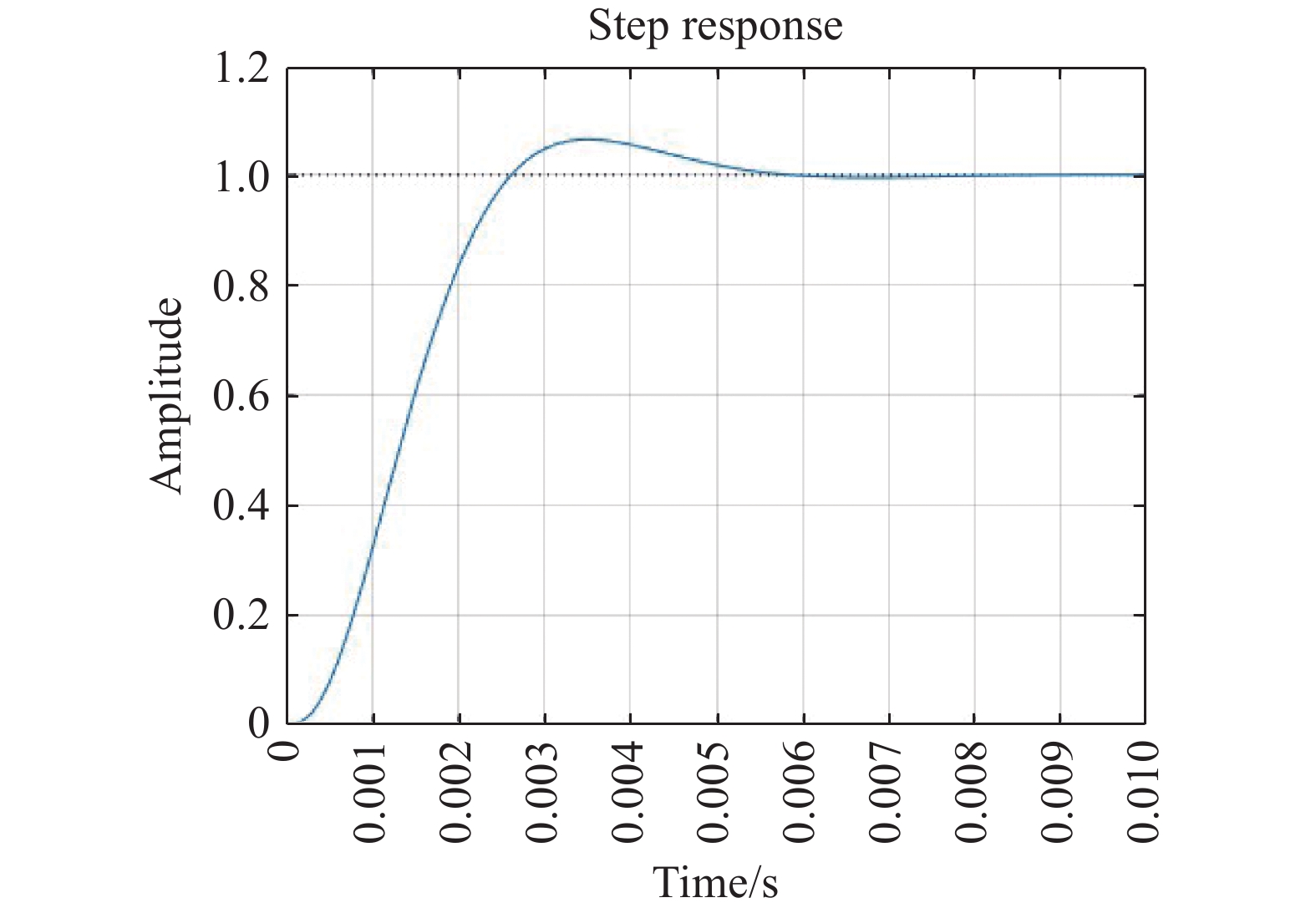
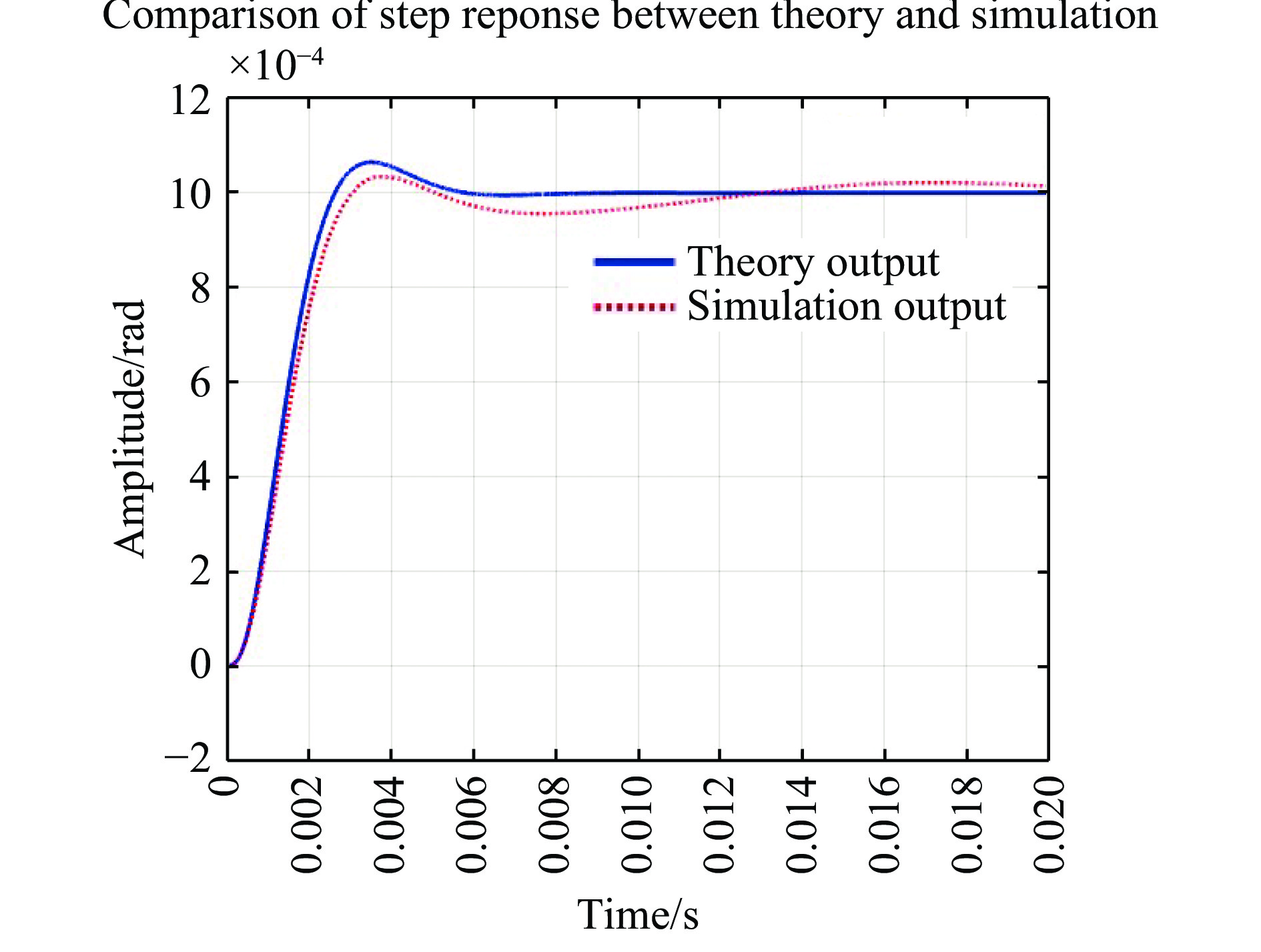
图 9. 闭环控制系统阶跃响应曲线
Fig. 9. Step response of closed loop control system
下载图片 查看原文
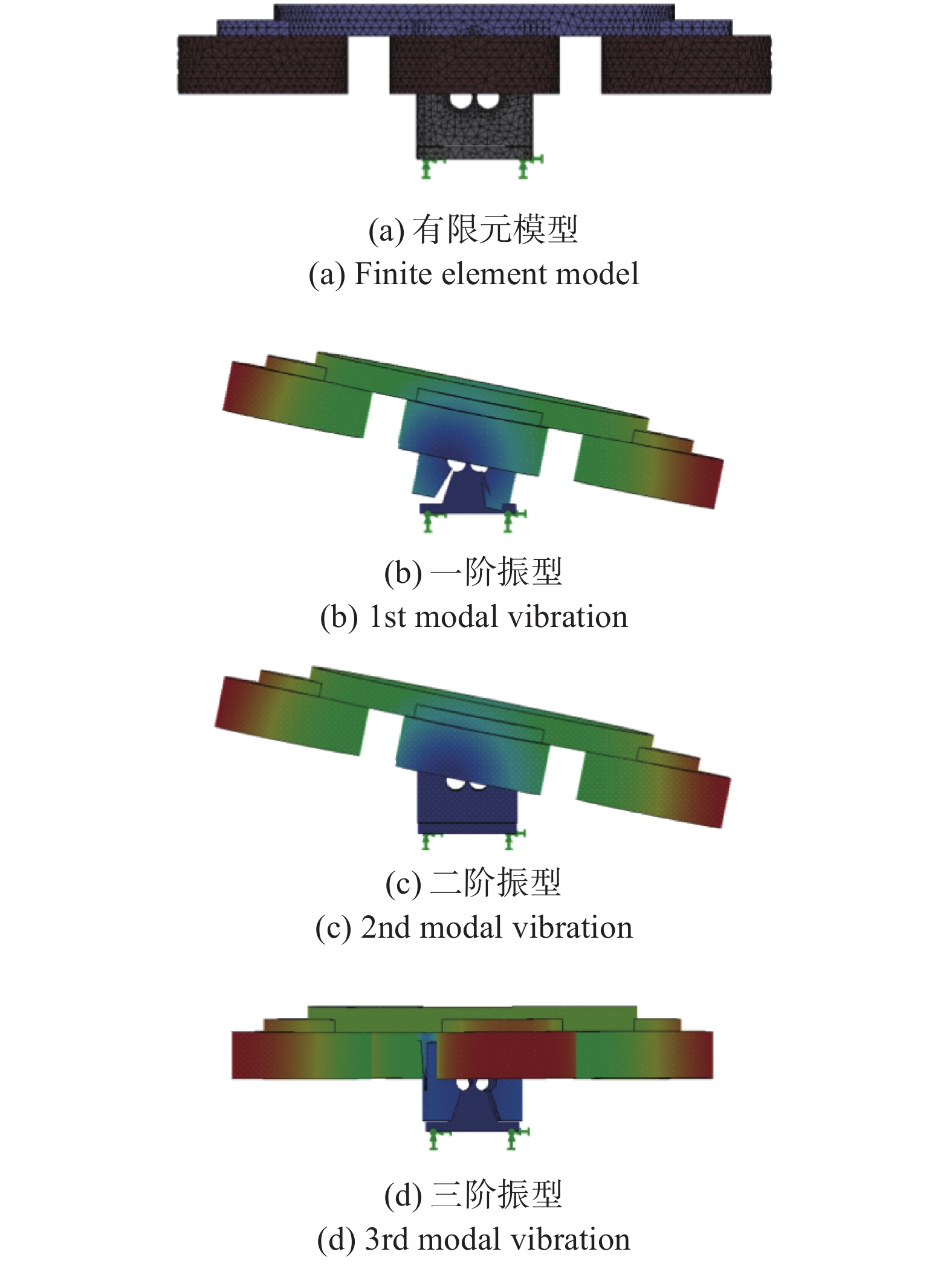
图 10. 摆动部分有限元分析结果
Fig. 10. Finite element analysis result of swing part
下载图片 查看原文
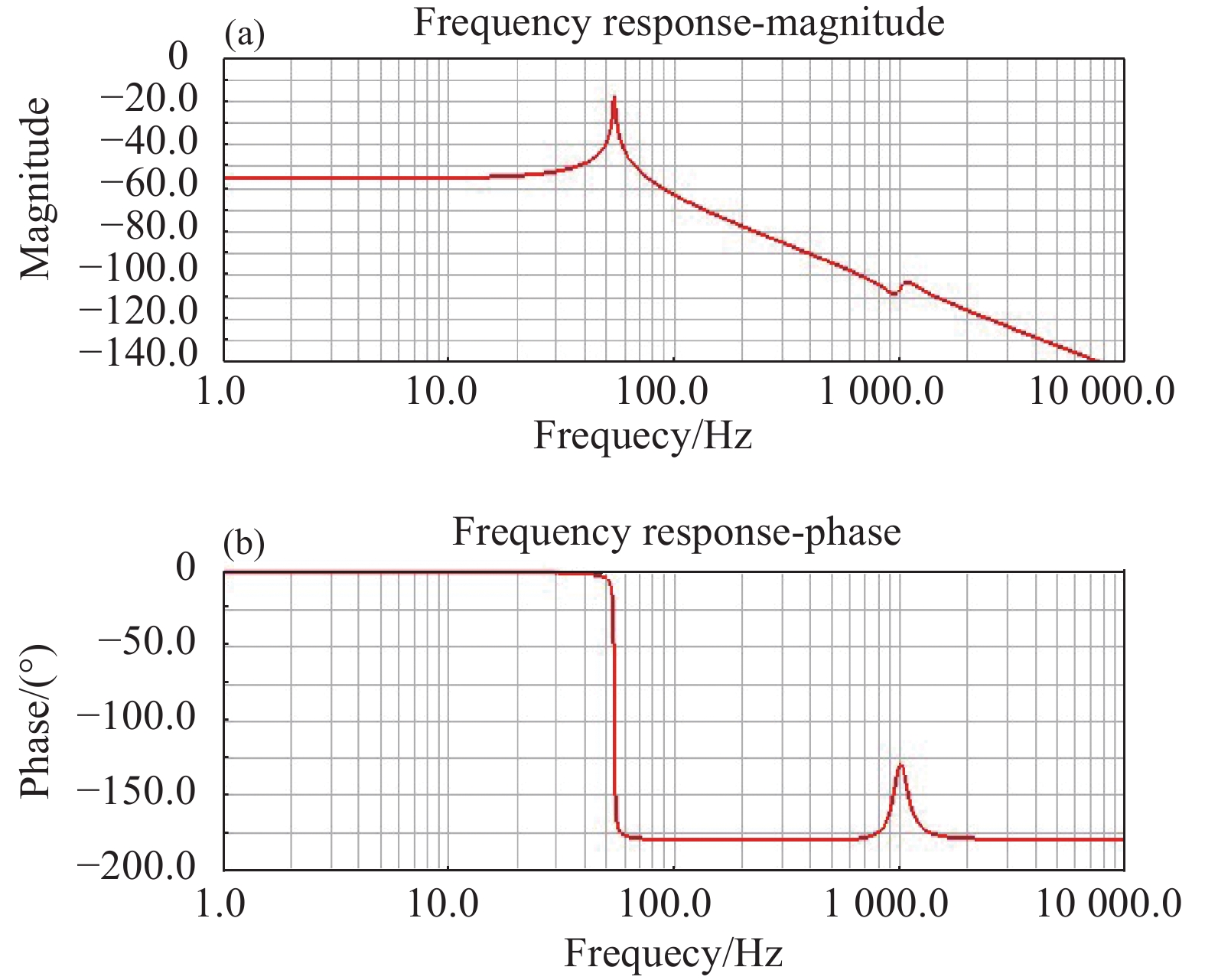
图 11. 运动方向频率响应特性
Fig. 11. Frequency response characteristic of motion axis
下载图片 查看原文
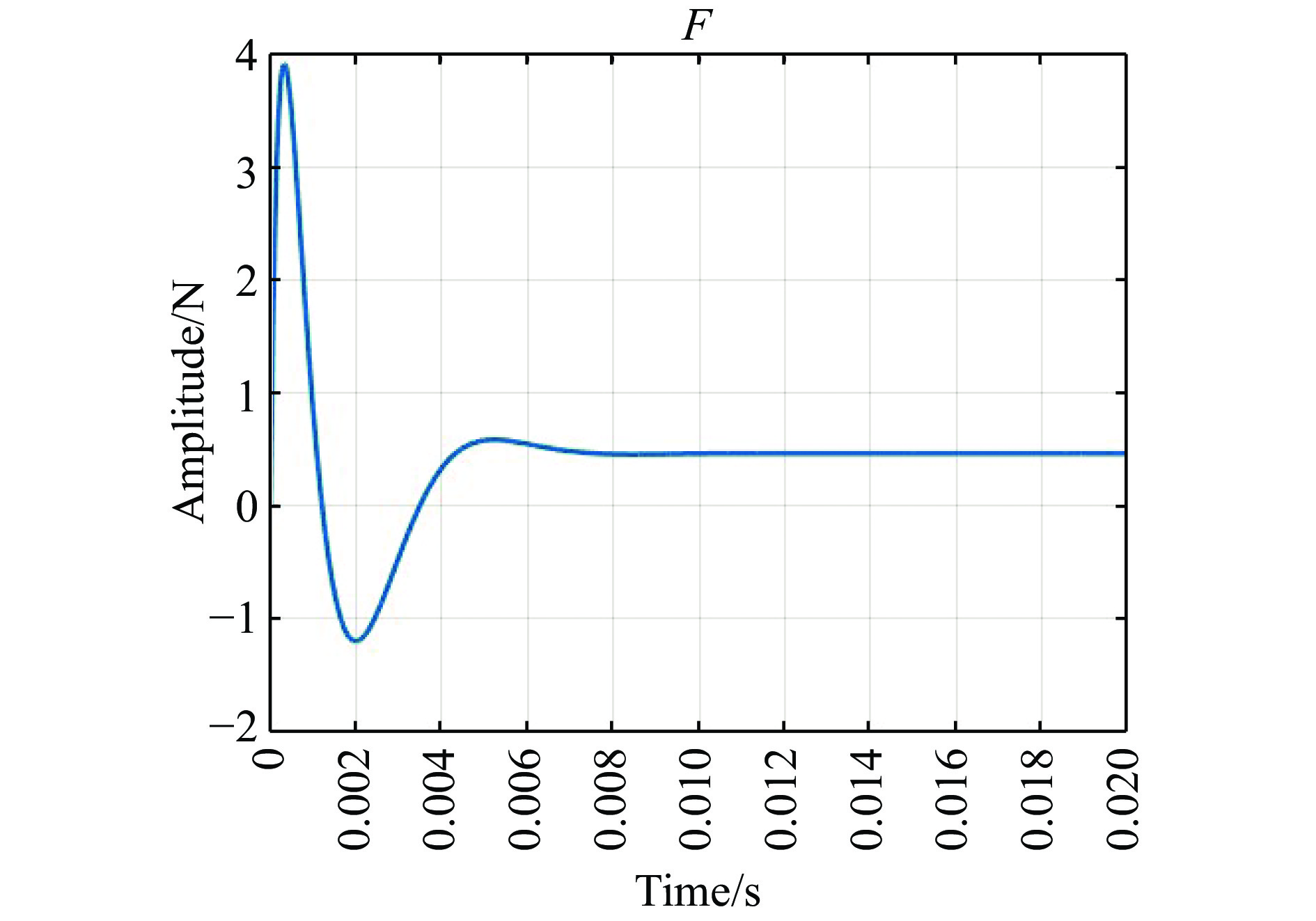
图 12. 控制信号
Fig. 12. Control signal
下载图片 查看原文
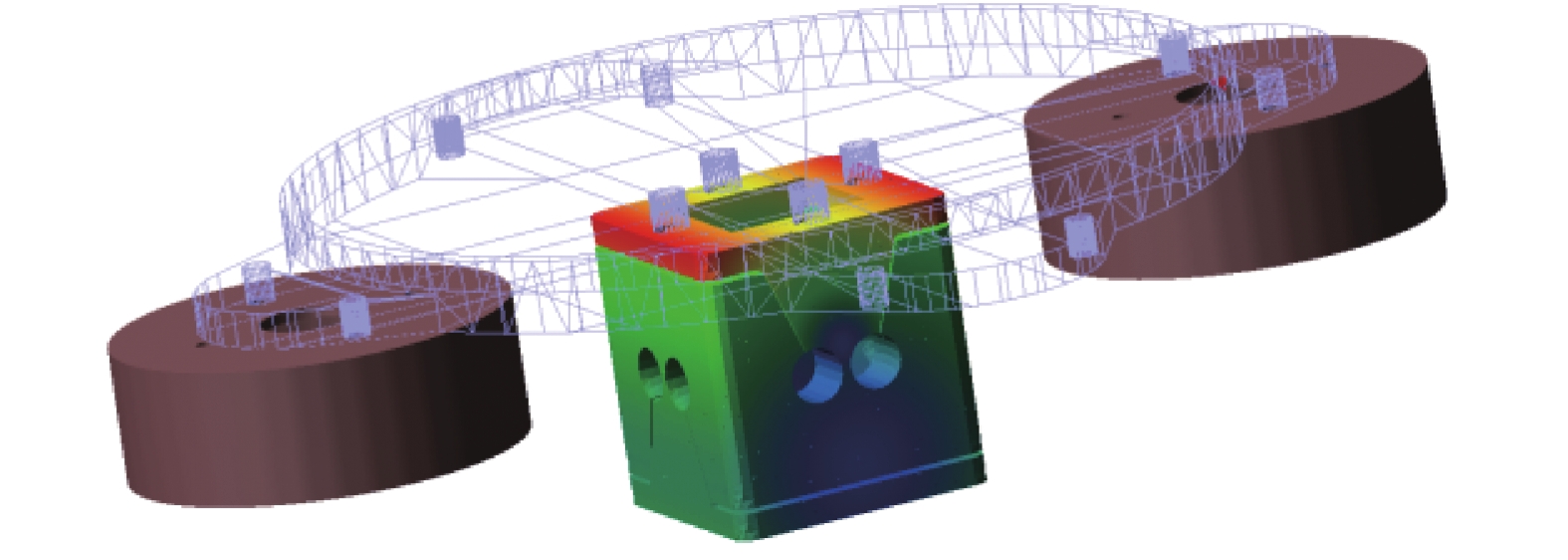
图 13. 摆动部分运动学模型
Fig. 13. Kinematics model of swing parts
下载图片 查看原文
图 14. 反射镜输出转角信号
Fig. 14. Output angle signal of mirror
下载图片 查看原文
表 1快速反射镜设计指标
Table1. Design index of fast steering mirror
| Index | Parameter | | Size | Φ100 mm×7 mm
| | Angle range | ±10 mrad | | Closed-loop bandwidth | 200 Hz | | Positioning accuracy | 5 μrad |
|
查看原文
表 2摆动部分材料属性
Table2. Material properties of swing parts
| Parts | Name of material | Density/
kg∙mm−3 | Young's modulus/GPa | Poisson
rate
| | Mirror | Aluminium alloy | 2.7e−6 | 71 | 0.33 | | Flexible support | Titanium alloy | 4.48e−6 | 110 | 0.34 | | Coil stator | Copper | 8.9e−6 | 8.9e−6 | 0.37 | | Mirror frame | Aluminium alloy | 2.68e−6 | 69 | 0.33 |
|
查看原文
表 3快速反射镜摆动组件的质量属性
Table3. Mass properties of swing part of fast steering mirror
| Total mass/kg | Moment of inertia ofx axis/kg∙mm−2 | Moment of inertia ofy axis/kg∙mm−2 | | 0.388 | 489.091 | 489.091 |
|
查看原文
表 4音圈电机性能参数
Table4. Performance parameters of voice coil motor
| Performance parameter | Symbol | Value | Unit | | Direct current resistance | R | 3.7 | Ω | | Inductance | L | 1.0 | mH | | Back potential constant | ke | 3.5 | V/m·s−1 | | Force constant | kf | 8.9 | N/A
| | Sustained thrust | Fc | 16.3 | N | | Peak thrust | Fp | 44 | N | | Total travel | S | ±2 | mm | | Coil side clearance | Cl | 0.4 | mm | | Coil assembly weight | mc | 45 | g | | Magnetic steel component weight | mf | 225 | g |
|
查看原文
表 5柔性铰链结构参数
Table5. Structure parameters of flexible hinge
| Structure name | Symbol | Value | Unit | | Cutting radius | R | 3 | mm | | Thickness | t | 1 | mm | | Width | b | 7 | mm |
|
查看原文
艾志伟, 嵇建波, 王鹏举, 李静, 周皓阳. 两轴柔性支承快速反射镜结构控制一体化设计[J]. 红外与激光工程, 2020, 49(7): 20190479. Zhiwei Ai, Jianbo Ji, Pengjv Wang, Jing Li, Haoyang Zhou. Integrative design of structure control for two-axis fast steering mirror with flexible support[J]. Infrared and Laser Engineering, 2020, 49(7): 20190479.



 PDF全文
PDF全文
