光学学报, 2018, 38 (2): 0201001, 网络出版: 2018-08-30
基于小波去噪算法的全天时大气水汽拉曼激光雷达探测与分析  下载: 1118次
下载: 1118次
Detection and Analysis of All-Day Atmospheric Water Vapor Raman Lidar Based on Wavelet Denoising Algorithm
图 & 表
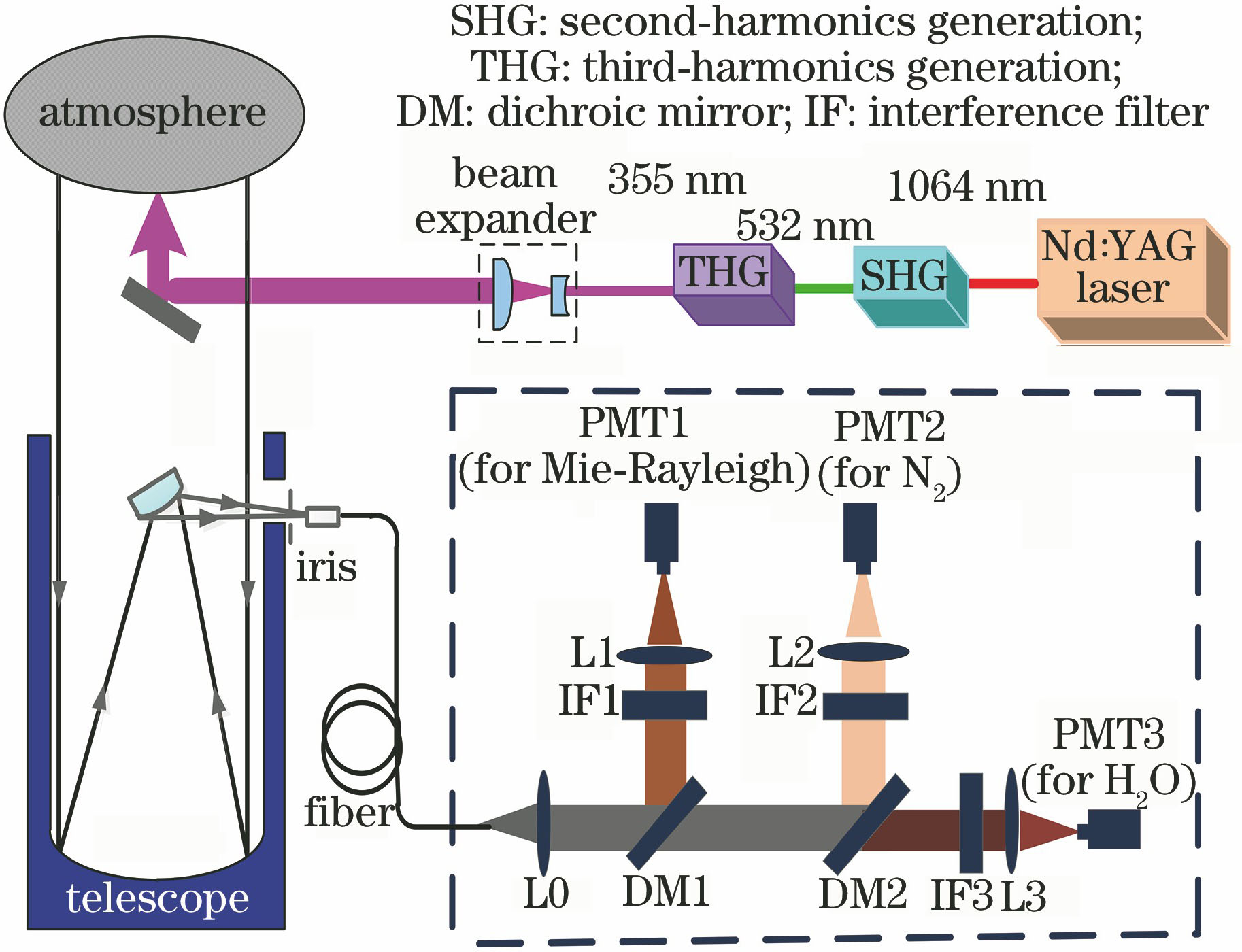
图 2. 一组白天探测水汽拉曼散射信号去噪前后对比。(a)采用不同滤波器长度的小波族去噪后SNR和RMSE比较; (b)去噪前后距离校正平方结果比较
Fig. 2. Comparison of water vapor Raman scattering signals before and after denoising detected in daytime. (a) SNR and RMSE denoised by wavelet basis with different filter lengths; (b) comparison of range-square-corrected results before and after denoising

图 3. 一组白天探测米-瑞利散射信号去噪前后对比。(a)采用不同滤波器长度的小波族去噪后SNR和RMSE;(b)去噪前后距离校正平方结果比较
Fig. 3. Comparison of Mie-Rayleigh scattering signals before and after denoising in daytime. (a) SNR and RMSE denoised by wavelet basis with different filter lengths; (b) comparison of range-square-corrected results before and after denoising

图 4. 利用不同阈值函数对白天水汽拉曼散射信号进行去噪的结果
Fig. 4. Denoising results of daytime water vapor Raman scattering signals denoised with different threshold functions

图 5. 利用不同阈值获取方法对白天探测水汽拉曼散射信号进行去噪的结果。 (a) 距离校正平方信号; (b) SNR和RMSE
Fig. 5. Denoising results of water vapor Raman scattering signals denoised by different threshold acquisition methods in daytime. (a) RSCS; (b) SNR and RMSE

图 6. 利用不同阈值获取方法对米-瑞利散射信号进行去噪的结果。 (a)距离校正平方信号; (b) SNR和RMSE
Fig. 6. Denoising results of Mie-Rayleigh scattering signals denosied by different threshold acquisition methods in daytime. (a) RSCS; (b) SNR and RMSE

图 7. 白天激光雷达探测去噪前后的结果比较。(a)水汽和氮气拉曼散射回波距离校正平方信号;(b)水汽混合比廓线; (c)水汽探测SNR
Fig. 7. Comparison of lidar detection results before and after denoising in daytime. (a) RSCS of water vapor and nitrogen Raman scattering; (b) water vapor mixing ratio profile; (c) SNR of water vapor detection

图 8. 去噪前后激光雷达信号的回归关系。(a)米-瑞利散射信号; (b)水汽拉曼散射信号
Fig. 8. Regression relationship of lidar signal before and after denoising. (a) Mie Rayleigh scattering signal; (b) water vapor Raman scattering signal

图 9. 2016-09-22 00∶00-2016-09-23 00∶00连续探测水汽混合比THI图的去噪前后结果比较。 (a) 去噪前; (b)去噪后
Fig. 9. THI displays of water vapor mixing ratio in 2016-09-22 00∶00-2016-09-23 00∶00 before and after denoising. (a) Before denoising; (b) after denoising


表 1拉曼激光雷达系统主要参数
Table1. Specification parameters of Raman lidar system
|
王玉峰, 曹小明, 张晶, 汤柳, 宋跃辉, 狄慧鸽, 华灯鑫. 基于小波去噪算法的全天时大气水汽拉曼激光雷达探测与分析[J]. 光学学报, 2018, 38(2): 0201001. Yufeng Wang, Xiaoming Cao, Jing Zhang, Liu Tang, Yuehui Song, Huige Di, Dengxin Hua. Detection and Analysis of All-Day Atmospheric Water Vapor Raman Lidar Based on Wavelet Denoising Algorithm[J]. Acta Optica Sinica, 2018, 38(2): 0201001.



 PDF全文
PDF全文

