光学学报, 2020, 40 (21): 2115002, 网络出版: 2020-10-25
基于深度相机的特殊表面定位与修复  下载: 1070次
下载: 1070次
Depth Camera-Based Location and Restoration of Special Surface
图 & 表
图 2. 深度图预处理。(a)原深度图;(b)阴影噪声区;(c)分割ROI;(d)置信度掩模
Fig. 2. Depth image preprocessing. (a) Raw depth image; (b) shadow noise area; (c) ROI segmentation; (d) reliability mask

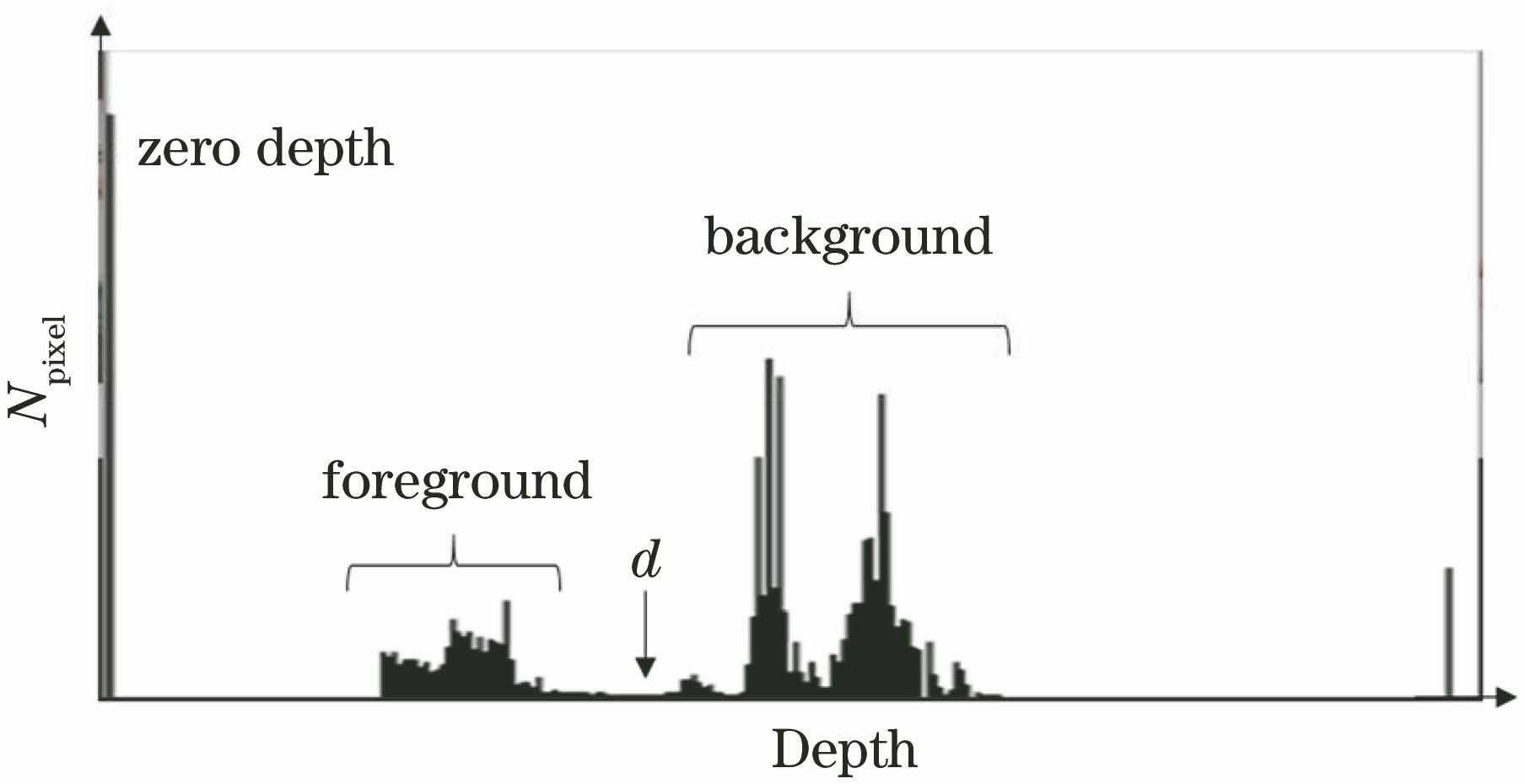
图 4. 深度边缘权值设置。(a) σ0邻域范围;(b) ωm函数曲线
Fig. 4. Weight setting near depth edge. (a) σ0 neighborhood range; (b) ωm function curve
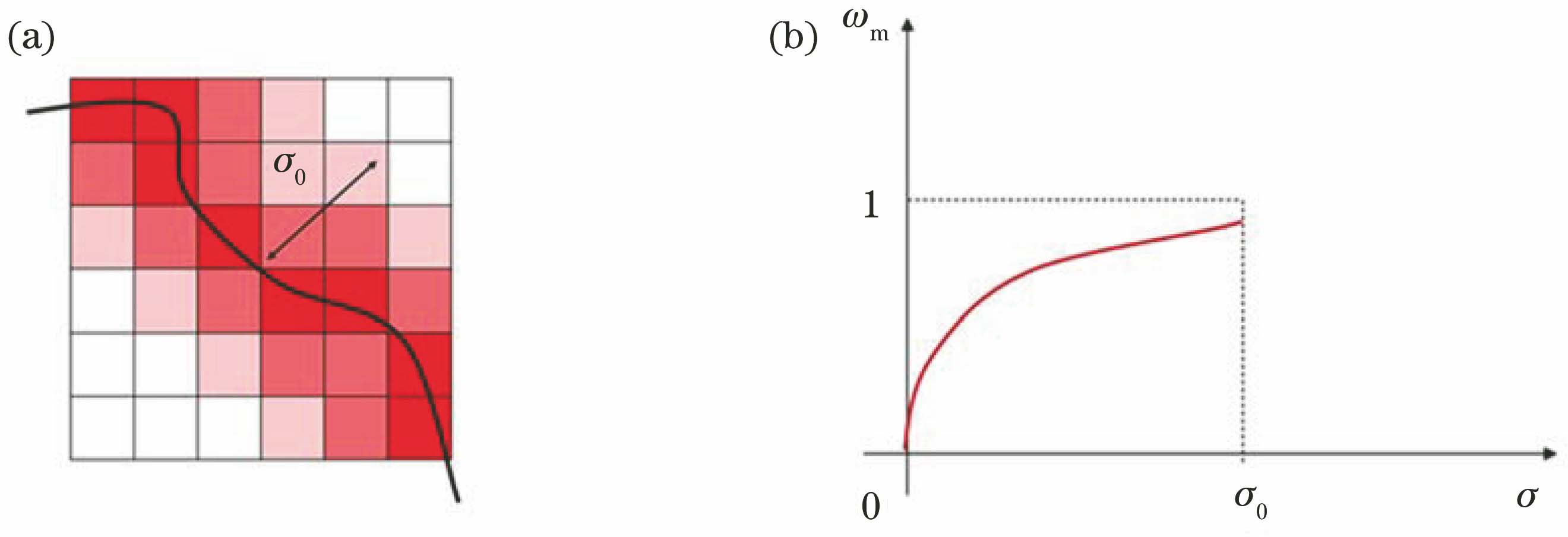
图 5. TSDF变化量ηTS。(a)彩色图;(b)~(d) ηTS<γl
图 7. 模型修复实验。(a)修复前模型;(b)修复后模型;(c)实验环境与设置;(d)特殊物体;(e)修复前模型细节;(f)修复后模型细节
Fig. 7. Model reparation experiment. (a) Model before reparation; (b) model after reparation; (c) experimental environment and setting; (d) peculiar object; (e) model detail before reparation; (f) model detail after reparation

图 8. 不同位姿结果对应的模型。(a)实验设置;(b) KinectFusion;(c) SDF-tracker;(d)所提方法
Fig. 8. Models corresponding to different pose results. (a) Experimental setting; (b) KinectFusion; (c) SDF-tracker; (d) proposed method
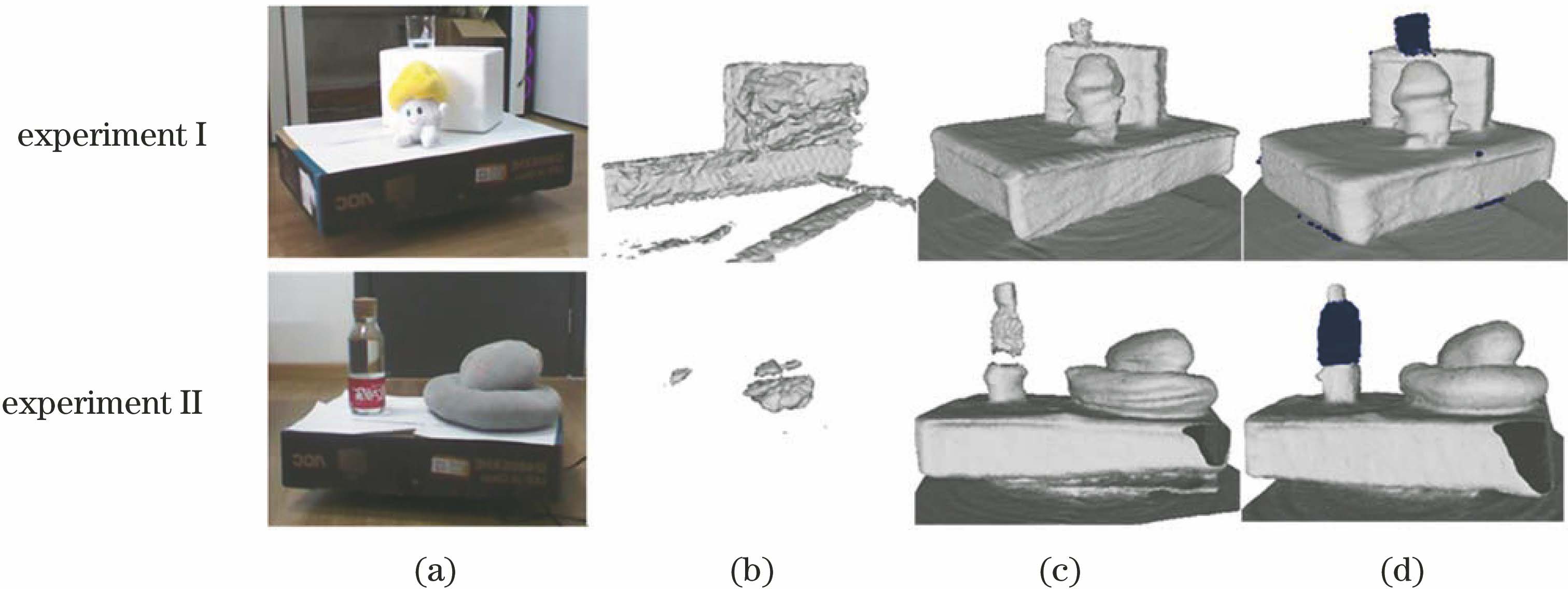
图 9. 重建结果对比1。(a)实验环境与设置;(b)相机位姿;(c)算法Ⅰ结果;(d)所提方法结果
Fig. 9. Comparison of reconstruction results 1. (a) Experimental environment and setting; (b)camera pose; (c) result obtained by algorithm Ⅰ; (d) result obtained by proposed method

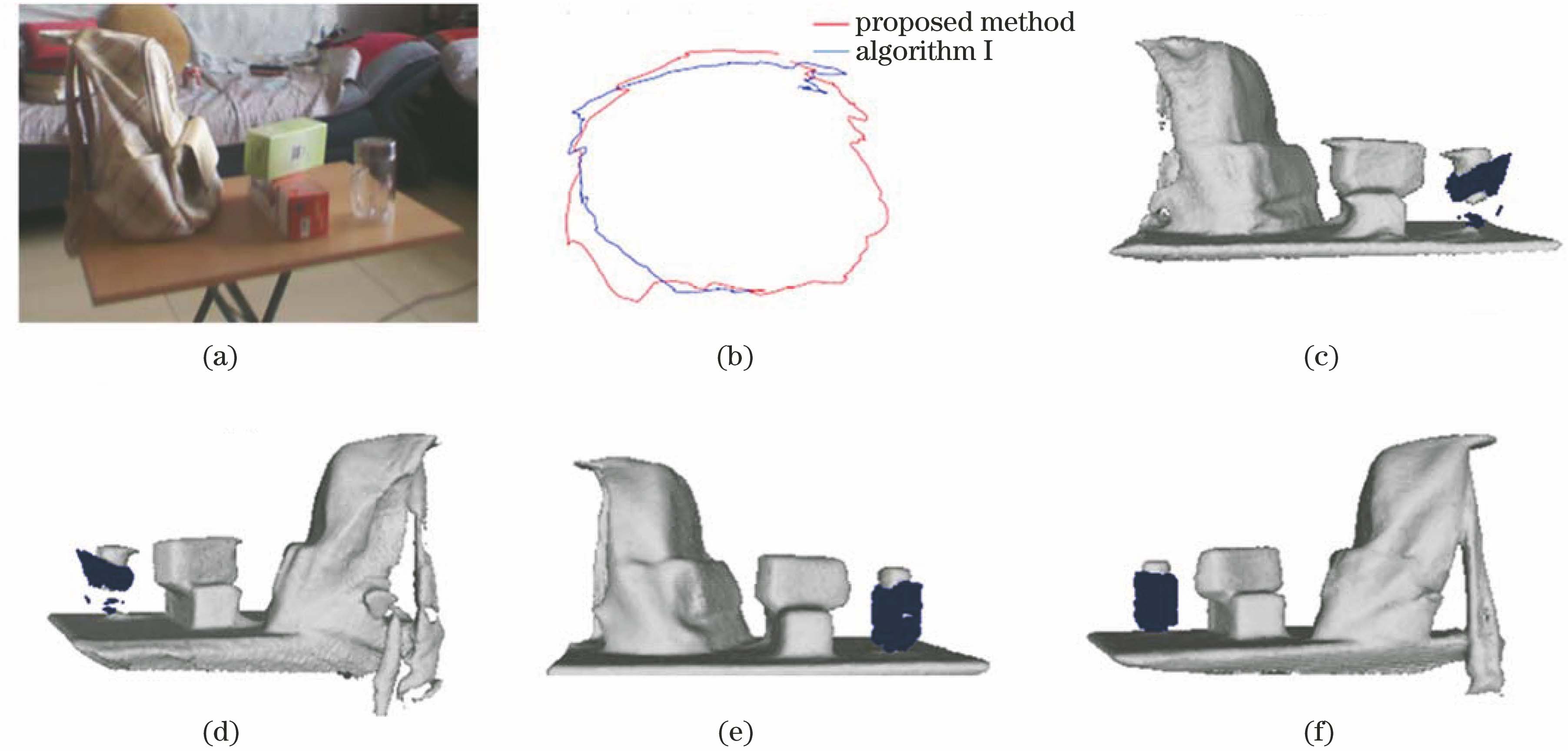
表 1实验Ⅰ中位姿追踪误差分析
Table1. Error analysis of pose tracking in experiment Ⅰmm
|
表 2实验Ⅱ中位姿追踪误差分析
Table2. Error analysis of pose tracking in experiment Ⅱmm
|
费点, 陈建林, 刘东生, 张之江. 基于深度相机的特殊表面定位与修复[J]. 光学学报, 2020, 40(21): 2115002. Dian Fei, Jianlin Chen, Dongsheng Liu, Zhijiang Zhang. Depth Camera-Based Location and Restoration of Special Surface[J]. Acta Optica Sinica, 2020, 40(21): 2115002.



 PDF全文
PDF全文

