基于卷积神经网络结合改进Harris-SIFT的点云配准方法  下载: 972次
下载: 972次
Point Cloud Registration Method Based on Combination of Convolutional Neural Network and Improved Harris-SIFT
西安建筑科技大学信息与控制工程学院, 陕西 西安 710055
图 & 表
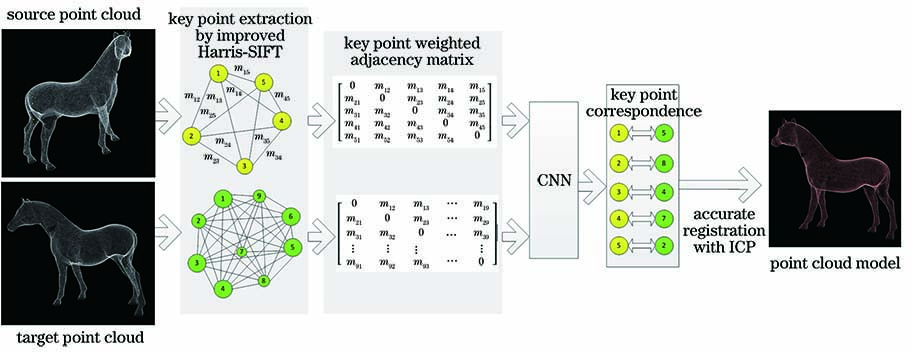
图 1. 基于CNN结合改进Harris-SIFT的点云配准方法流程图
Fig. 1. Flow chart of point cloud registration method based on CNN combined with improved Harris-SIFT
下载图片 查看原文
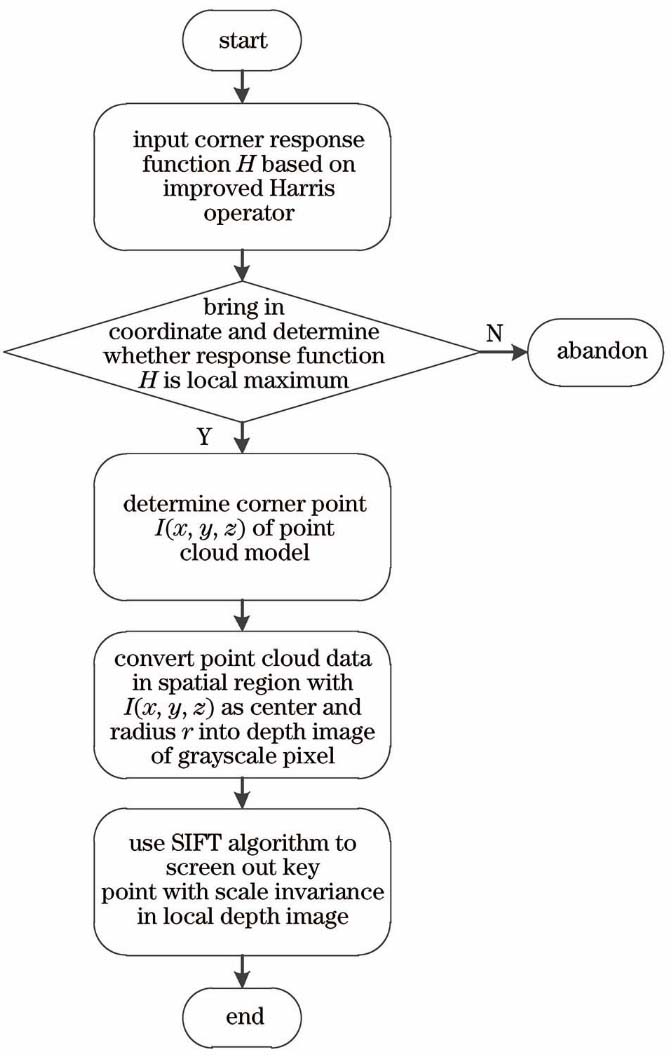
图 2. 改进Harris-SIFT算法提取点云关键点流程图
Fig. 2. Flow chart of improved Harris-SIFT algorithm to extract key points of point cloud
下载图片 查看原文
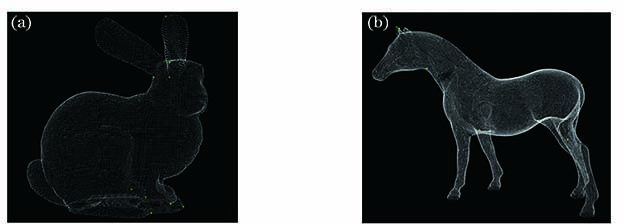
图 3. 改进的Harris-SIFT算法提取的不同模型的关键点。(a) Bunny模型;(b) Horse模型
Fig. 3. Extracted key points of different models by improved Harris-SIFT algorithm. (a) Bunny model; (b) Horse model
下载图片 查看原文
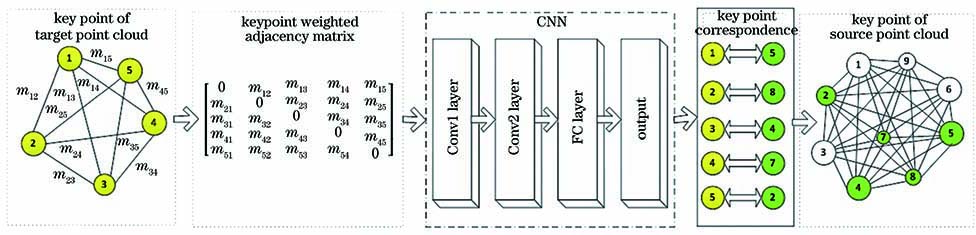
图 4. CNN模型的结构
Fig. 4. Structure of CNN model
下载图片 查看原文
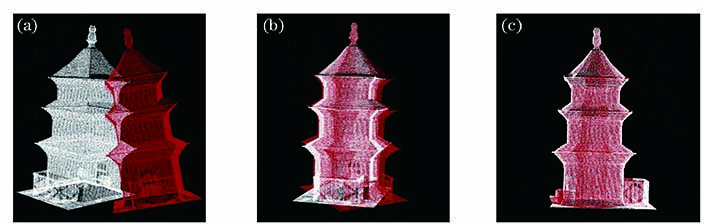
图 10. 基师塔点云模型配准结果。(a)配准前,(b)粗配准后,(c)精配准后
Fig. 10. Registration results of Jishi tower point cloud model. (a) Before registration; (b) after coarse registration; (c) after accurate registration
下载图片 查看原文
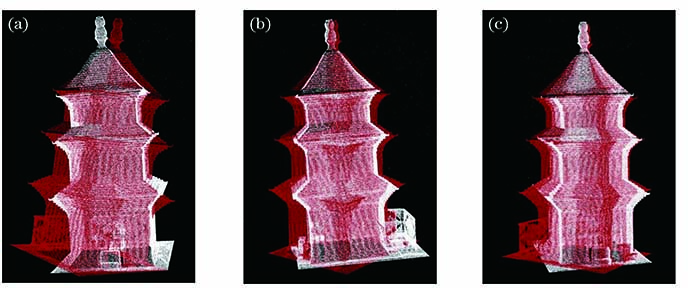
图 11. 基师塔模型配准效果对比。(a) ICP算法,(b) NV-TICP算法,(c) ISS-ICP算法
Fig. 11. Comparison of registration effects of Jishi tower model. (a) ICP algorithm; (b) NV-TICP algorithm; (c) ISS-ICP algorithm
下载图片 查看原文
表 1点云模型的数据集信息
Table1. Dataset information of point cloud model
| Dataset | Amount of point data |
|---|
| Bunny | 35947 | | Horse | 48485 | | Dragon | 437645 |
|
查看原文
表 2Bunny点云模型中检测到的关键点
Table2. Key points detected in Bunny point cloud model
| Key point ofsource point cloud | Position coordinate | Key point oftarget point cloud | Positioncoordinate |
|---|
| 1 | (-0.0775, 0.0078, -0.0890) | 1 | (0.0785, 0.0487, -0.0762) | | 2 | (0.0366, 0.3565, -0.3373) | 2 | (0.0010, 0.5621, -0.0154) | | 3 | (-0.0394, 0.5782, 0.1947) | 3 | (-0.0864, 0.0509, 0.0643) | | 4 | (0.0045, 0.0783, -0.0053) | 4 | (-0.0056, 0.0345, 0.7290) | | 5 | (-0.0597, 0.1082, 0.0753) | 5 | (0.3648, 0.6439, -0.0542) | | 6 | (-0.8963, 0.0091, 0.0802) | 6 | (-0.0040, 0.6909, 0.2003) | | 7 | (-0.7205, 0.0004, 0.0507) | | | | 8 | (0.0832, 0.0305, 0.2198) | | | | 9 | (0.1002, 0.0405, 0.0077) | | |
|
查看原文
表 3Horse点云模型中检测到的关键点
Table3. Key points detected in Horse point cloud model
| Key point ofsource point cloud | Position coordinate | Key point oftarget point cloud | Positioncoordinate |
|---|
| 1 | (-0.0607, 0.0082, 0.2054) | 1 | (0.8734, -0.0880, 0.0007) | | 2 | (0.4738, -0.0509, 0.0042) | 2 | (0.9867, 0.0092, -0.8460) | | 3 | (0.0340, 0.0416, -0.0060) | 3 | (-0.0021, 0.0071, 0.0209) | | 4 | (0.8192, 0.1417, -0.2090) | 4 | (0.0870, -0.0003, 0.9562) | | 5 | (0.0900, -0.4203, 0.0404) | 5 | (-0.0065, 0.0535, 0.0030) | | 6 | (0.8150, 0.1040, 0.1690) | | |
|
查看原文
表 44种配准方法在不同点云模型下配准效果对比
Table4. Comparison of four registration methods under different point cloud models
| Model | Registration error |
|---|
| Algorithm | ER /(°) | EM /mm | Running time /s |
|---|
| ICP | 12.46 | 7.71 | 5.297 | | Bunny | NV-ICP | 10.89 | 5.51 | 21.895 | | ISS-ICP | 8.33 | 6.03 | 14.998 | | CNN-ICP | 3.77 | 1.12 | 5.470 | | ICP | 13.01 | 5.46 | 5.913 | | Horse | NV-ICP | 11.72 | 4.74 | 20.785 | | ISS-ICP | 9.43 | 4.88 | 15.055 | | CNN-ICP | 3.57 | 1.03 | 6.438 | | ICP | 21.07 | 12.04 | 13.789 | | Dragon | NV-ICP | 13.93 | 6.75 | 31.367 | | ISS-ICP | 9.52 | 5.35 | 21.352 | | CNN-ICP | 3.07 | 1.93 | 9.537 |
|
查看原文
表 5基师塔的点云模型数据集信息
Table5. Dataset information of Jishi-tower point cloud model
| Model | Amount ofpoint data | Percentage ofmissing point /% |
|---|
| Source point cloud | 590560 | 17 | | Target point cloud | 608260 | 14 |
|
查看原文
表 64种配准方法在基师塔点云模型中配准效果对比
Table6. Comparison of registration effects of four registration methods in Jishi tower model
| Registrationalgorithm | Registration error | Runningtime /s |
|---|
| ER /(°) | EM /mm |
|---|
| ICP | 104.06 (fail) | 18.55 | 122.756 | | NV-TICP | 34.58 | 8.47 | 81.567 | | ISS-ICP | 43.55 | 6.76 | 45.257 | | CNN-ICP | 5.52 | 1.80 | 15.880 |
|
查看原文
李昌华, 史浩, 李智杰. 基于卷积神经网络结合改进Harris-SIFT的点云配准方法[J]. 激光与光电子学进展, 2020, 57(20): 201102. Changhua Li, Hao Shi, Zhijie Li. Point Cloud Registration Method Based on Combination of Convolutional Neural Network and Improved Harris-SIFT[J]. Laser & Optoelectronics Progress, 2020, 57(20): 201102.




 PDF全文
PDF全文

