基于激光点云全局特征匹配处理的目标跟踪算法  下载: 1638次
下载: 1638次
Object Tracking Algorithm Based on Global Feature Matching Processing of Laser Point Cloud
1 国防科技大学电子对抗学院脉冲功率激光技术国家重点实验室, 安徽 合肥 230037
2 安徽省电子制约技术重点实验室, 安徽 合肥 230037
3 中央军委装备发展部驻北京地区军事代表局, 北京 100191
图 & 表
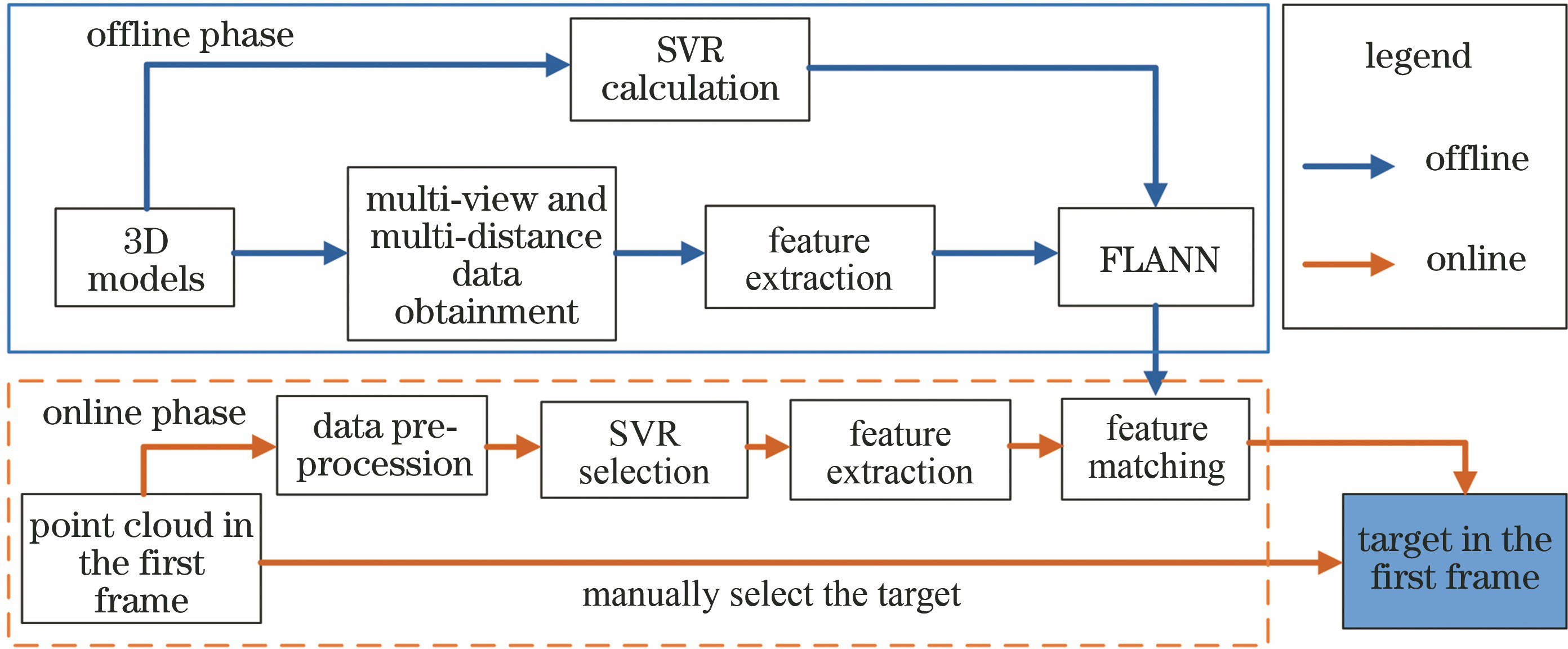
图 1. 基于SVR筛选的点云目标识别流程
Fig. 1. Point cloud target recognition process based on SVR selection
下载图片 查看原文
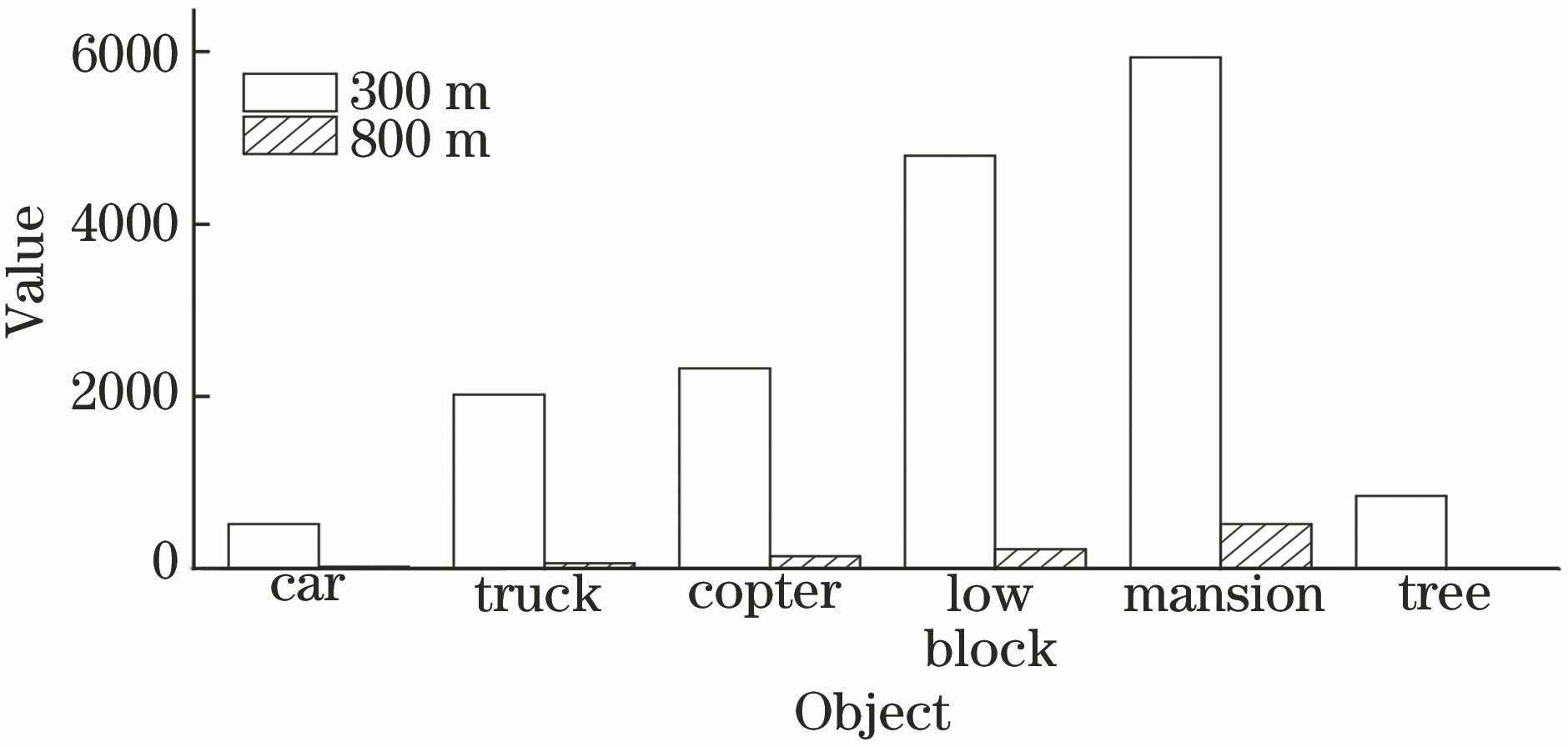
图 2. 六种目标在两种激光雷达与目标间距离下的SVR值
Fig. 2. SVR values of six objects for two LIDAR-object distances
下载图片 查看原文
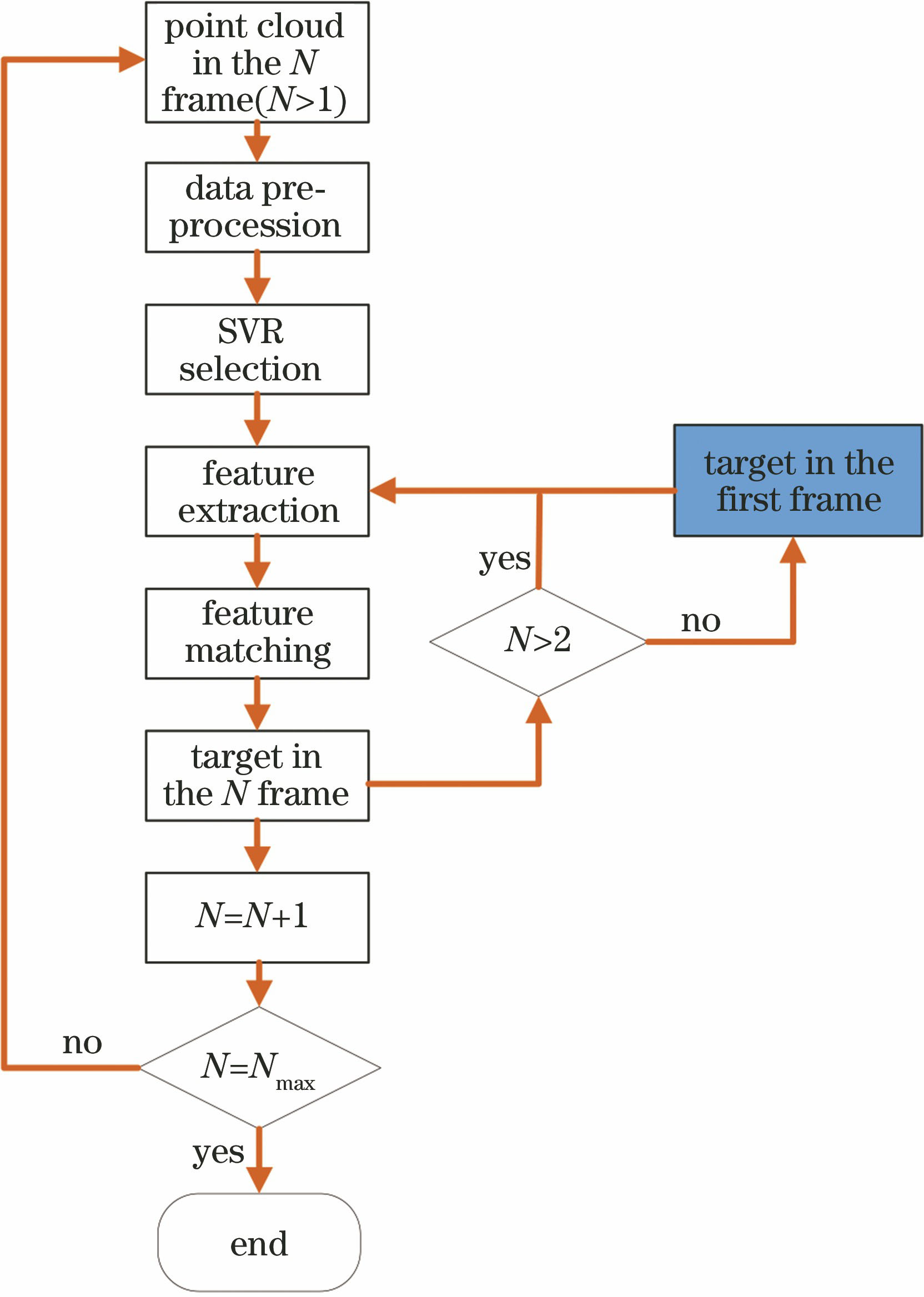
图 3. 基于全局特征匹配的点云目标跟踪流程图
Fig. 3. Point cloud target tracking flow based on global feature matching
下载图片 查看原文
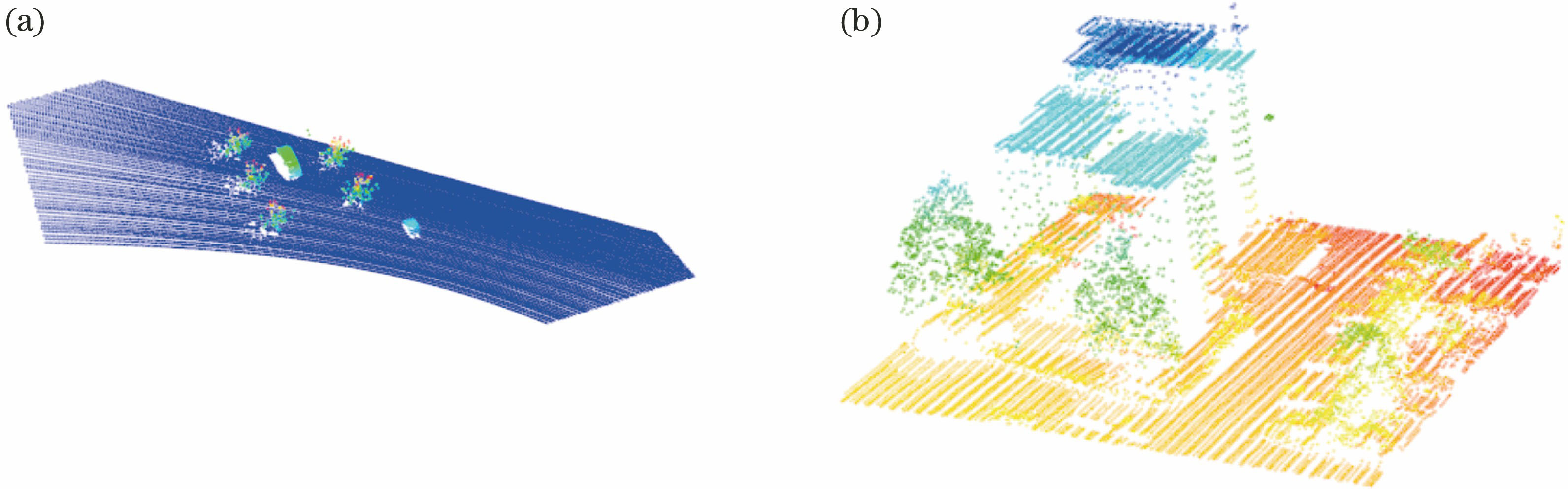
图 4. 不同数据集可视化效果。(a)数据集1,(b)数据集2
Fig. 4. Visualization of different datasets. (a) Dataset 1; (b) dataset 2
下载图片 查看原文
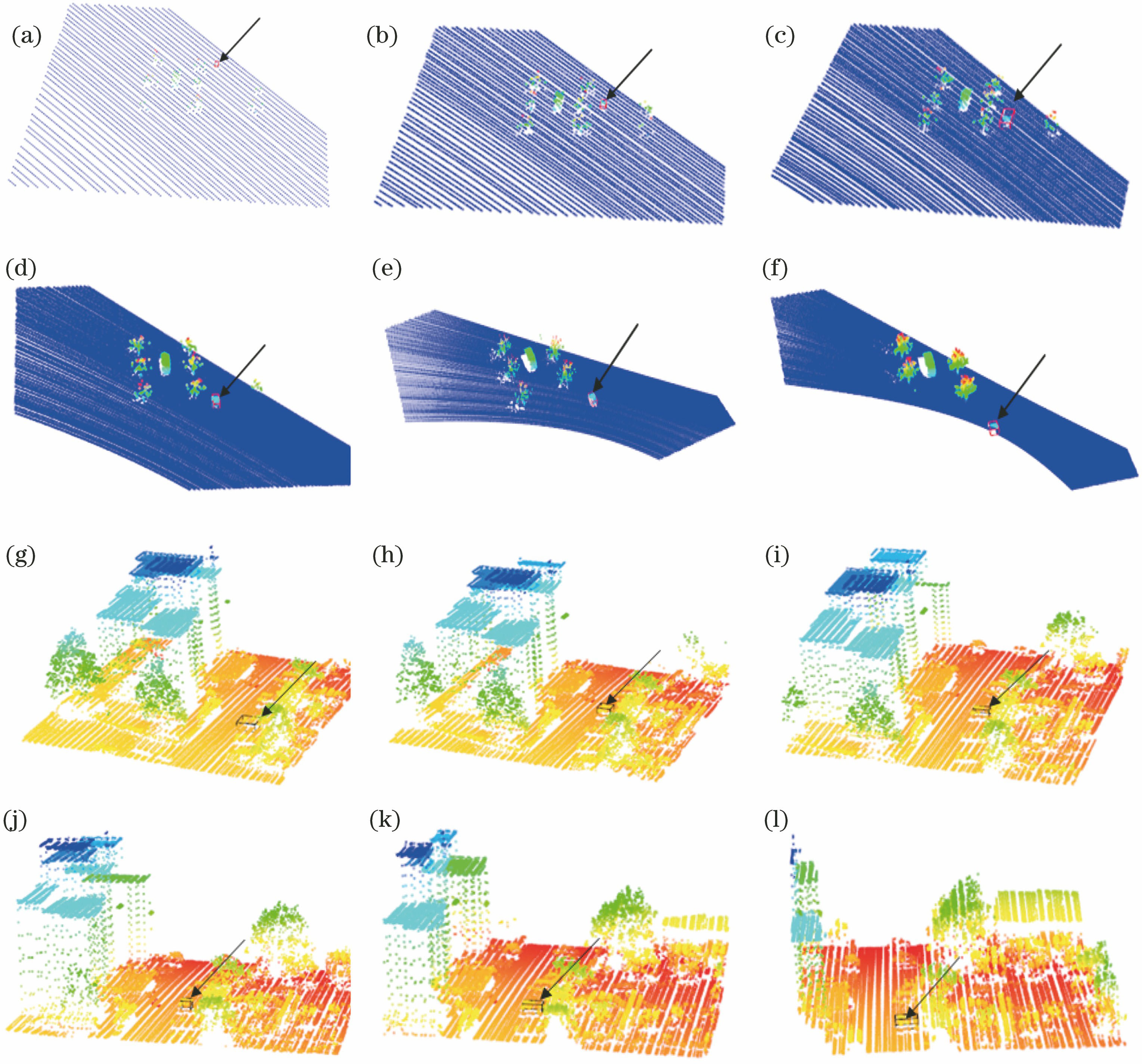
图 5. 第N帧目标跟踪结果。(a)(g) N=40;(b)(h) N=80;(c)(i) N=120;(d)(j) N=160;(e)(k) N=200;(f)(l) N=240
Fig. 5. Object tracking results in the N th frame. (a)(g) N=40; (b)(h) N=80; (c)(i) N=120; (d)(j) N=160; (e)(k) N=200; (f)(l) N=240
下载图片 查看原文
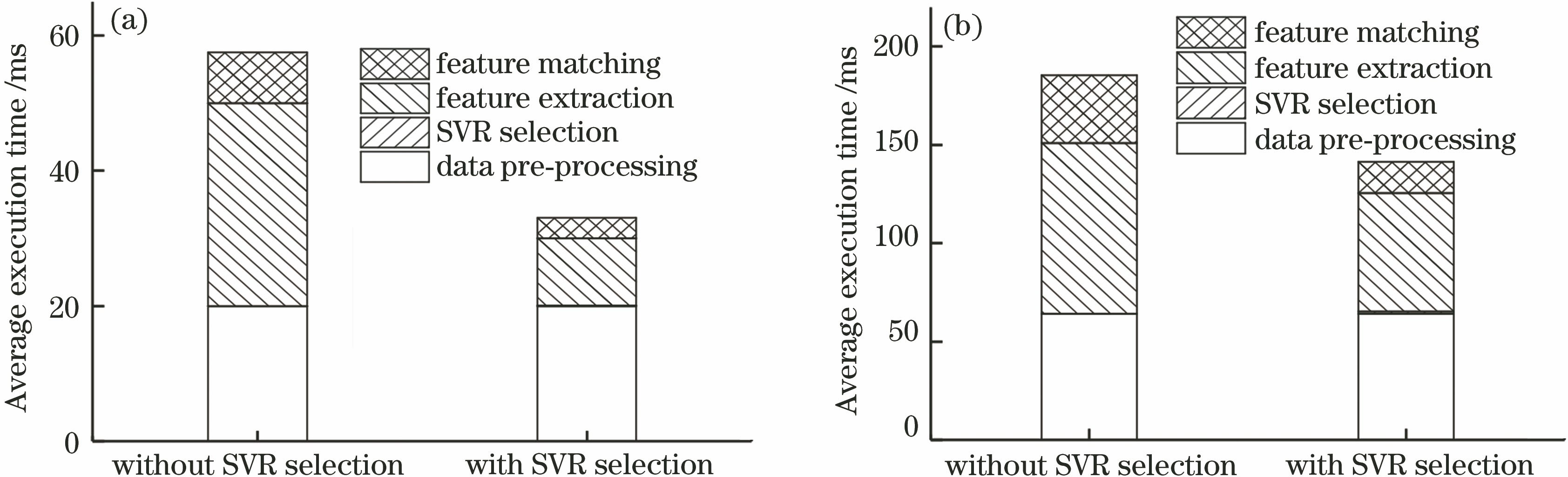
图 6. 不同数据集的目标跟踪过程各部分运行时间。(a)数据集1;(b)数据集2
Fig. 6. Execution time of each part in object tracking based on different datasets. (a) Dataset 1; (b) dataset 2
下载图片 查看原文
表 1四种全局描述子的对比
Table1. Comparison of four global feature descriptors
| Descriptor | Histogram length | Information | Pre-procession | Normalization |
|---|
| VFH | 308 | Angle | Normal | Yes | | CVFH | 308 | Angle | Normal, segmentation | None | | GRSD | 21 | Distance | Normal, voxelization, surface categorization | None | | ESF | 640 | Angle, distance, area | None | Yes |
|
查看原文
表 2场景仿真参数
Table2. Parameters of the scene simulation
| Target | Size /(m×m×m) | Target speed /(m·s-1) | Platform speed /(m·s-1) | Pitch /(°) | Yaw /(°) |
|---|
| | 0 | 340 | | | | Jeep | 3.83×1.68×1.51 | 20 | 0 | 15-60 | 0-180 | | | 20 | 340 | | |
|
查看原文
表 3四种特征描述子目标识别效果对比
Table3. Recognition rate comparison of four feature descriptors%
| Descriptor | LIDAR-target range /m |
|---|
| 300 | 600 | 900 | 1200 | 1500 | 1800 |
|---|
| VFH | 76.7 | 68.2 | 53.0 | 55.5 | 41.0 | 40.5 | | CVFH | 89.3 | 90.0 | 91.5 | 83.5 | 74.0 | 47.8 | | GRSD | 49.6 | 44.2 | 35.4 | 22.2 | 26.6 | 13.2 | | ESF | 99.0 | 99.0 | 94.0 | 76.5 | 71.0 | 54.7 |
|
查看原文
表 4基于SVR筛选的目标识别效果对比
Table4. Recognition rate comparison with and without SVR selection
| Parameter | VFH | CVFH | GRSD | ESF |
|---|
| Recognition rate without SVR selection /% | 55.8 | 79.4 | 31.9 | 82.4 | | Dataset 1 | Recognition rate with SVR selection /% | 59.9 | 82.6 | 35.5 | 84.9 | | Increased recognition rate /% | 4.1 | 3.2 | 3.6 | 2.5 | | Execution time /ms | 3.6 | 4.5 | 31.0 | 39.0 | | Recognition rate without SVR selection /% | 57.5 | 80.1 | 34.3 | 84.0 | | Dataset 2 | Recognition rate with SVR selection /% | 62.3 | 83.3 | 38.6 | 86.7 | | Increased recognition rate /% | 4.8 | 3.2 | 4.3 | 3.7 | | Execution time /ms | 6.2 | 7.8 | 109.0 | 110.0 |
|
查看原文
表 5第N帧目标跟踪的跟踪准确率
Table5. Tracking accuracy of sight line in the Nth frame
| Parameter | N | | | | | |
|---|
| | | | | 40 | 80 | 120 | 160 | 200 | 240 |
|---|
| Dataset 1 | Accuracy without SVR selection /% | 50.0 | 71.3 | 72.7 | 74.1 | 75.3 | 80.3 | | Accuracy with SVR selection /% | 55.1 | 75.1 | 79.9 | 80.4 | 83.2 | 87.7 | | Dataset 2 | Accuracy without SVR selection /% | 81.3 | 82.0 | 80.5 | 80.3 | 81.7 | 82.5 | | Accuracy with SVR selection /% | 86.3 | 86.7 | 83.3 | 85.0 | 84.3 | 86.0 |
|
查看原文
钱其姝, 胡以华, 赵楠翔, 李敏乐, 邵福才. 基于激光点云全局特征匹配处理的目标跟踪算法[J]. 激光与光电子学进展, 2020, 57(6): 061012. Qishu Qian, Yihua Hu, Nanxiang Zhao, Minle Li, Fucai Shao. Object Tracking Algorithm Based on Global Feature Matching Processing of Laser Point Cloud[J]. Laser & Optoelectronics Progress, 2020, 57(6): 061012.




 PDF全文
PDF全文

