基于特征融合的长时目标跟踪算法  下载: 1153次
下载: 1153次
Long-Term Object Tracking Based On Feature Fusion
陆军工程大学无人机工程系, 河北 石家庄 050003
图 & 表
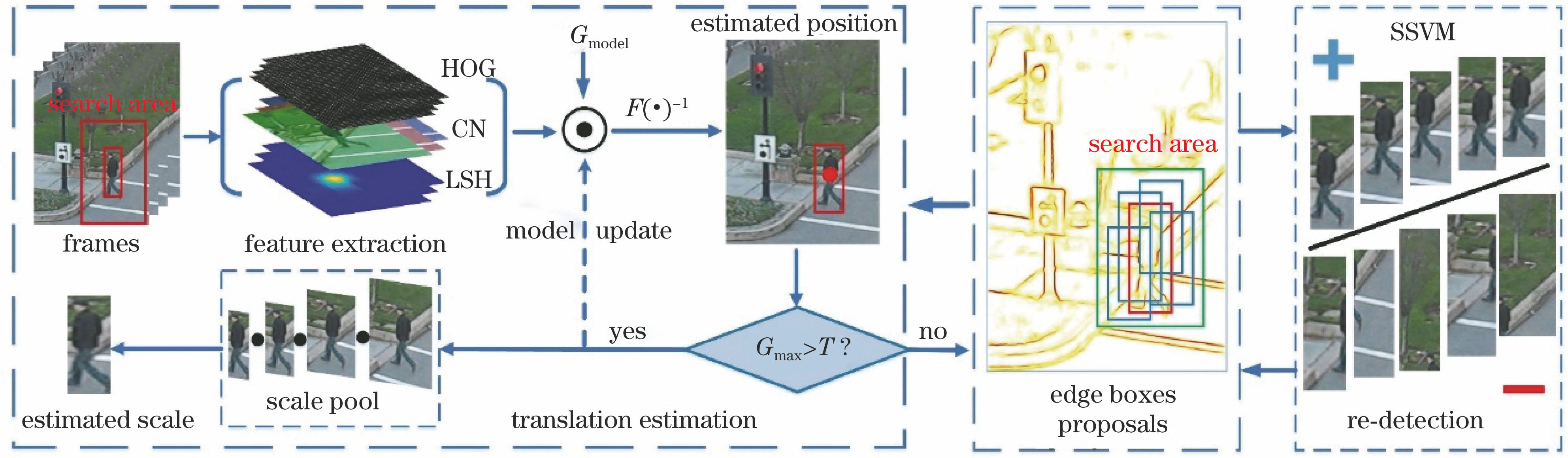
图 1. 本文算法框架
Fig. 1. Framework of proposed tracking algorithm
下载图片 查看原文
图 2. 目标特征可视化。(a)原始图像;(b) HOG;(c) LSH;(d)~(f) CN
Fig. 2. Object feature visualization. (a) Image; (b) HOG; (c) LSH; (d)-(f) CN
下载图片 查看原文
图 3. 候选区域提取
Fig. 3. Region proposal
下载图片 查看原文
图 4. 算法步骤
Fig. 4. Flow chart of proposed algorithm
下载图片 查看原文
图 5. 不同目标检测阈值跟踪结果
Fig. 5. Tracking results of different target detection threshold
下载图片 查看原文
图 6. OTB100跟踪结果评估曲线
Fig. 6. Tracking results evaluation plots on OTB100
下载图片 查看原文
图 7. OTB100部分目标跟踪结果与重叠率。(a) Panda; (b) Lemming; (c) Blur Owl; (d) Human5; (e) Soccer; (f) Wake board1; (g) Jogging-2
Fig. 7. Partial object tracking results and overlap rates on OTB100. (a) Panda; (b) Lemming; (c) Blur Owl; (d) Human5; (e) Soccer; (f) Wake board1; (g) Jogging-2
下载图片 查看原文
图 8. UAV123跟踪OPE评估曲线。(a)精度;(b)成功率
Fig. 8. OPE evaluation on UAV123. (a) Precision; (b) success rate
下载图片 查看原文
图 9. 实际应用中的跟踪结果。(a)自行车;(b)行人小孩;(c)行人女孩
Fig. 9. Tracking results in practical applications. (a) Bicycle; (b) child; (c) girl
下载图片 查看原文
表 1目标跟踪成功率
Table1. Success rate of object tracking
| Algorithm | Success rate | Tracking speed /(frame·s-1) |
|---|
| Proposed | 0.778 | 28.2 | | BACF | 0.758 | 21.2 | | SRDCF | 0.717 | 4.2 | | LCT | 0.621 | 19.7 | | MUSTER | 0.676 | 2.2 | | DSST | 0.548 | 18.6 | | KCF | 0.536 | 124.1 |
|
查看原文
表 2实验图像序列特点
Table2. Characteristics of image sequences in experiment
| Sequence | Characteristic | Frame number |
|---|
| Panda | SV,OCC,DEF,IPR,OPR,OV,LR | 1000 | | Lemming | IV,SV,OCC,FM,OPR,OV | 1336 | | Blur Owl | SV,MB,FM,IPR | 631 | | Human5 | SV,OCC,DEF | 713 | | Jogging-2 | OCC,DEF,OPR | 307 | | Soccer | IV,SV,OCC,MB,FM,IPR,OPR,BC | 392 | | Wake board1 | SV,IPR,DEF,FM | 141 |
|
查看原文
表 3目标跟踪成功率
Table3. Success rate of object tracking
| Algorithm | Success rate | Tracking speed /(frame·s-1) |
|---|
| Proposed | 0.537 | 29.8 | | BACF | 0.506 | 22.3 | | SRDCF | 0.511 | 5.6 | | LCT | 0.329 | 23.9 | | MUSTER | 0.436 | 0.9 | | DSST | 0.311 | 44.7 | | KCF | 0.294 | 307.6 |
|
查看原文
葛宝义, 左宪章, 胡永江. 基于特征融合的长时目标跟踪算法[J]. 光学学报, 2018, 38(11): 1115002. Baoyi Ge, Xianzhang Zuo, Yongjiang Hu. Long-Term Object Tracking Based On Feature Fusion[J]. Acta Optica Sinica, 2018, 38(11): 1115002.











 PDF全文
PDF全文

