基于邻域表面形变信息加权的点云配准  下载: 717次
下载: 717次
Point Cloud Registration Based on Weighting Information of Neighborhood Surface Deformation
1 辽宁工程技术大学电子与信息工程学院, 辽宁 葫芦岛 125100
2 中国科学院沈阳自动化研究所机器人学国家重点实验室, 辽宁 沈阳 110016
3 中国科学院机器人与智能制造创新研究院, 辽宁 沈阳 110016
图 & 表
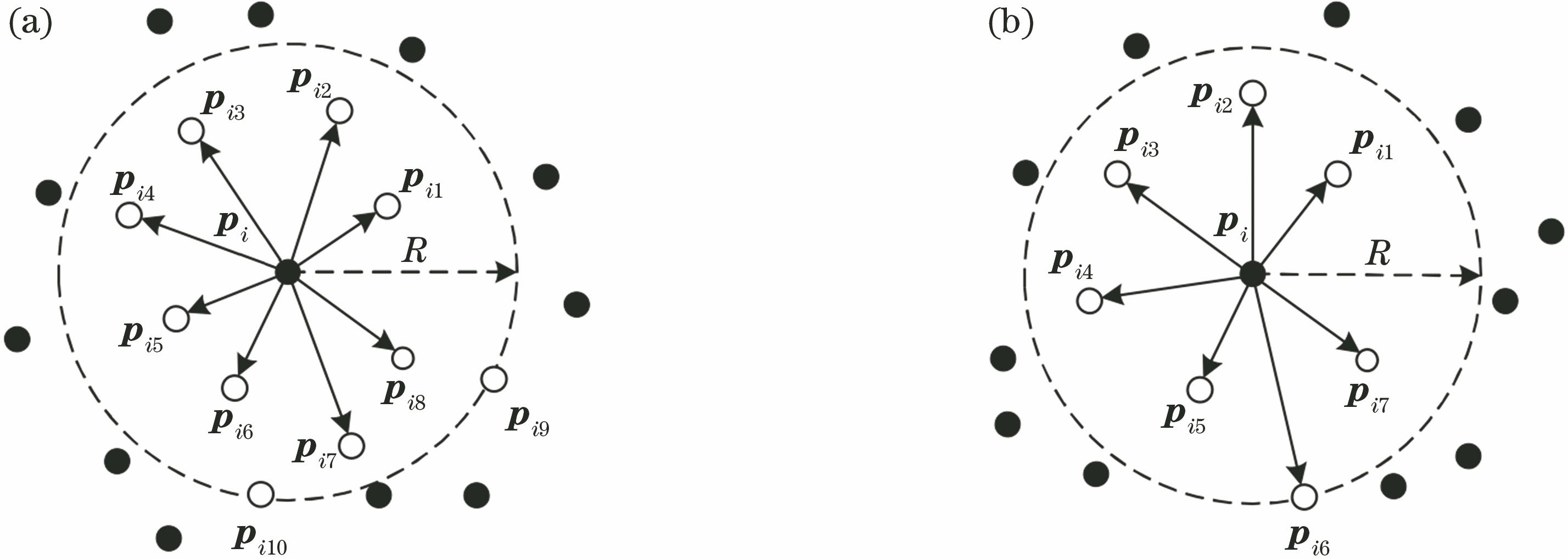
图 1. pi邻域中不同邻近点数量。(a)邻近点数量为8;(b)邻近点数量为7
Fig. 1. Number of different closest points in pi neighborhood. (a) Number of closest points is 8; (b) number of closest points is 7
下载图片 查看原文
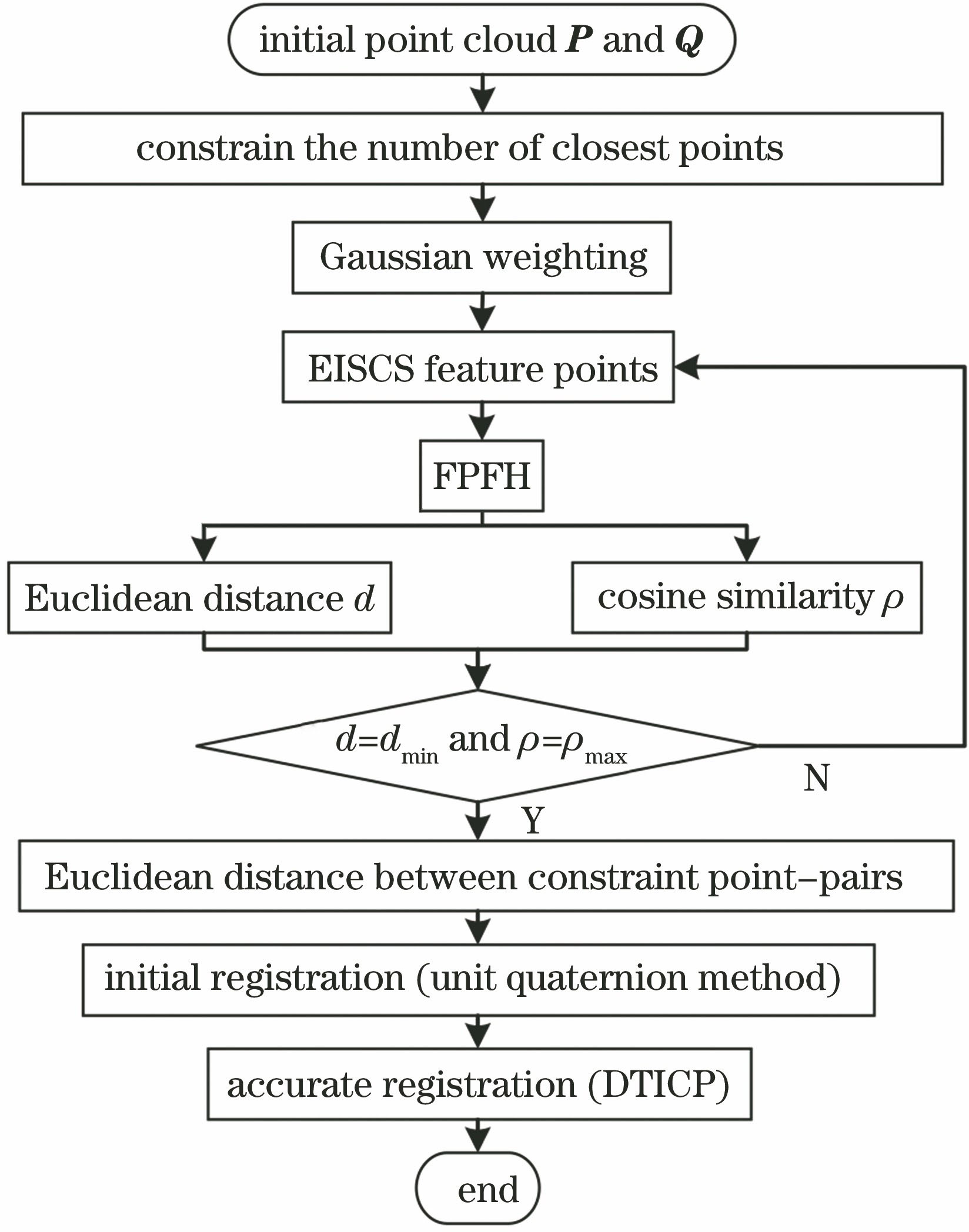
图 2. 所提配准算法的具体流程
Fig. 2. Schematic of specific process of proposed registration algorithm
下载图片 查看原文
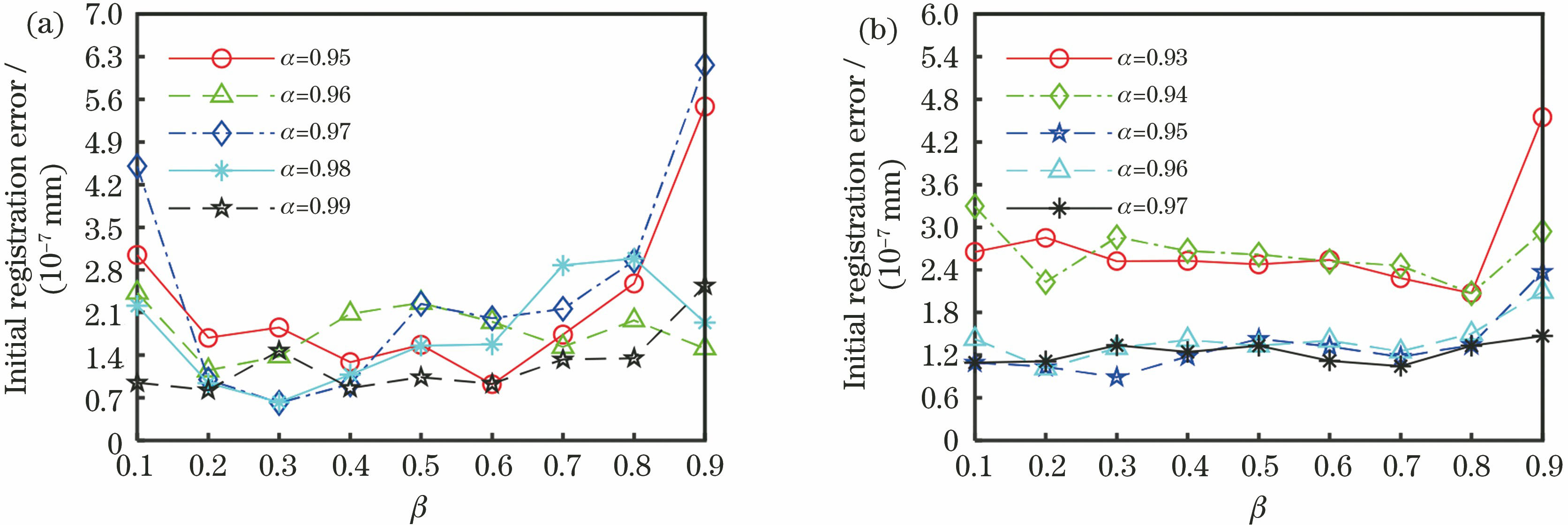
图 3. 阈值对初始配准结果的影响曲线。(a) Bunny模型;(b) Dragon模型
Fig. 3. Curves of threshold effect on initial registration results. (a) Bunny model; (b) Dragon model
下载图片 查看原文
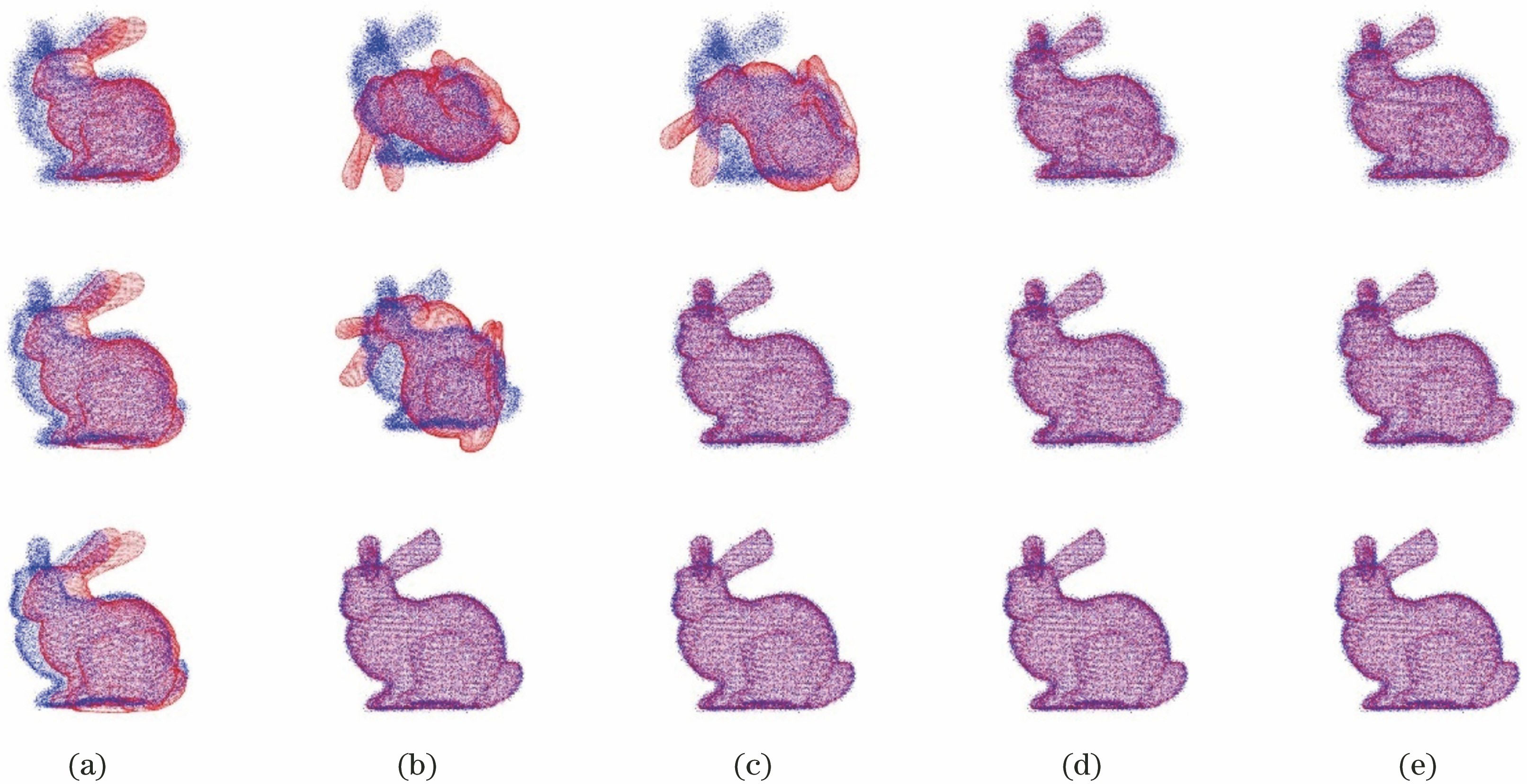
图 4. Bunny模型的配准效果。(a) TICP;(b) NV-TICP;(c) ISS-TICP;(d) MR-TICP;(e) EISCS-DTICP
Fig. 4. Registration results of Bunny model. (a) TICP; (b) NV-TICP; (c) ISS-TICP; (d) MR-TICP; (e) EISCS-DTICP
下载图片 查看原文
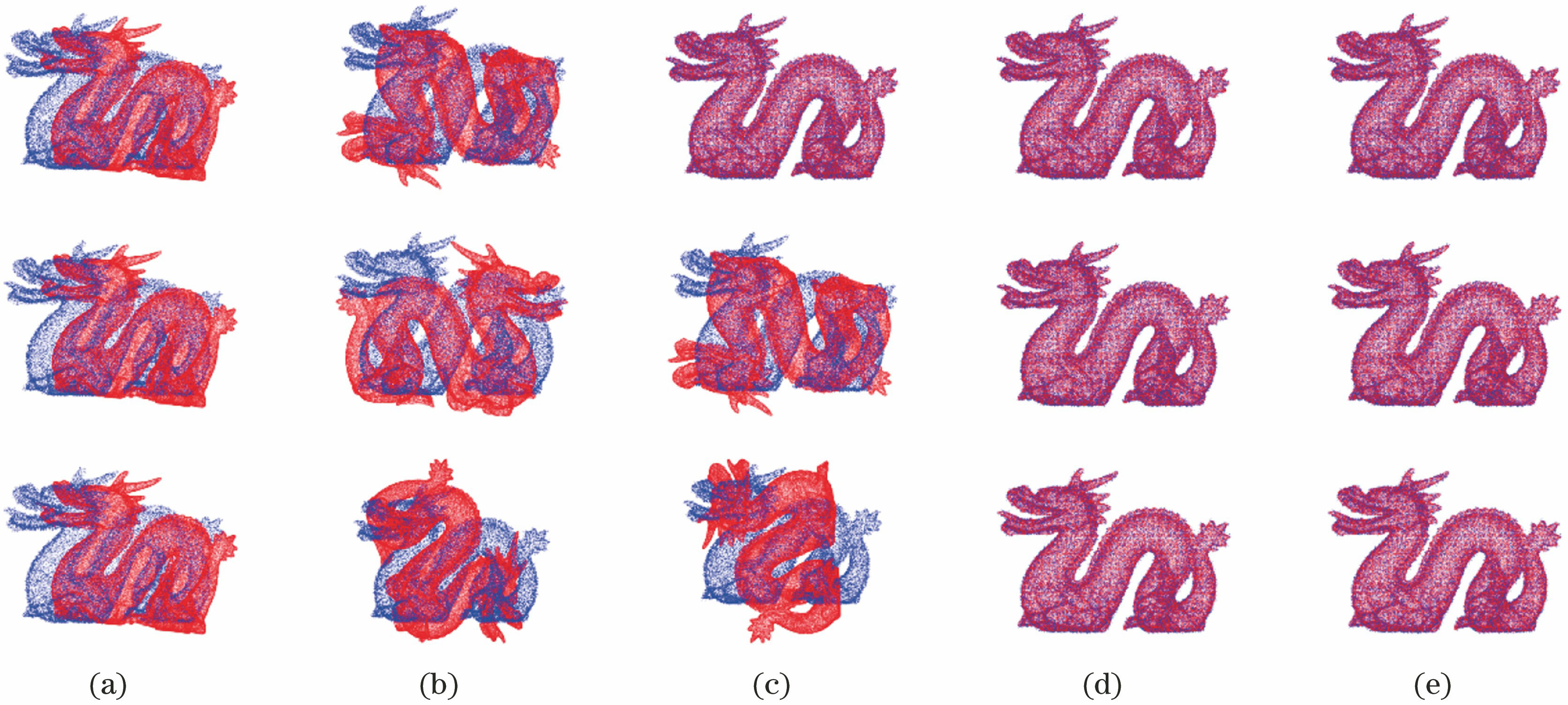
图 5. Dragon模型的配准效果。(a) TICP;(b) NV-TICP;(c) ISS-TICP;(d) MR-TICP;(e) EISCS-DTICP
Fig. 5. Registration results of Dragon model. (a) TICP; (b) NV-TICP; (c) ISS-TICP; (d) MR-TICP; (e) EISCS-DTICP
下载图片 查看原文
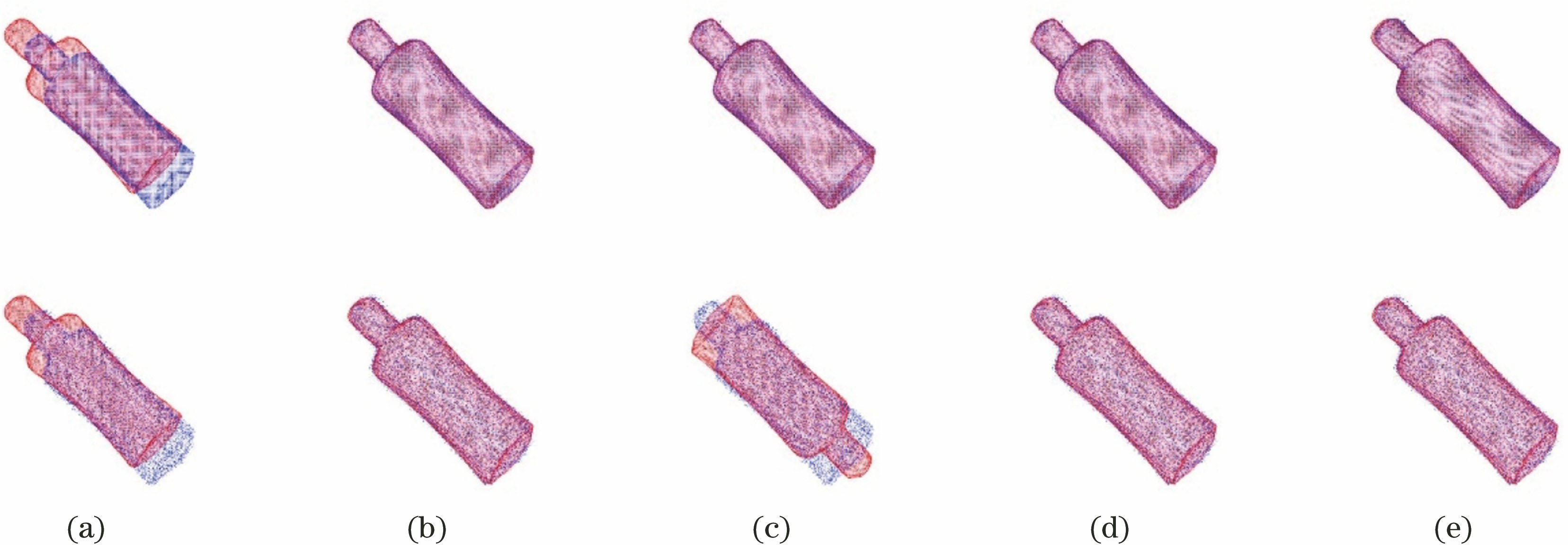
图 6. Bottle模型的配准效果。(a) TICP;(b) NV-TICP;(c) ISS-TICP;(d) MR-TICP;(e) EISCS-DTICP
Fig. 6. Registration results of Bottle model. (a) TICP; (b) NV-TICP; (c) ISS-TICP; (d) MR-TICP; (e) EISCS-DTICP
下载图片 查看原文
表 1Bunny模型在不同噪声情况下的精确配准结果
Table1. Accurate registration results of Bunny model under different noise conditions
| Algorithm | Registration error /(10-4 mm) | Registration time /s |
|---|
| 25 dB | 30 dB | 35 dB | 25 dB | 30 dB | 35 dB |
|---|
| TICP | 64.8090 | 63.3140 | 65.8800 | 0.21 | 0.28 | 0.35 | | NV-TICP | 45.3250 | 45.5238 | 5.3005 | 52.91 | 40.03 | 11.84 | | ISS-TICP | 44.2087 | 6.5982 | 5.3004 | 20.21 | 22.14 | 11.93 | | MR-TICP | 7.6317 | 6.6079 | 5.3005 | 41.50 | 39.49 | 38.34 | | EISCS-DTICP | 0.1616 | 0.1051 | 0.0059 | 32.21 | 28.13 | 23.16 |
|
查看原文
表 2Dragon模型在不同数据丢失情况下的精确配准结果
Table2. Accurate registration results of Dragon model under different data loss situations
| Algorithm | Registration error /(10-4 mm) | Registration time /s |
|---|
| 10% | 20% | 30% | 10% | 20% | 30% |
|---|
| TICP | 77.1000 | 76.7330 | 76.6850 | 1.19 | 0.88 | 0.79 | | NV-TICP | 63.6743 | 69.5212 | 61.8752 | 210.24 | 98.64 | 101.82 | | ISS-TICP | 3.7032 | 63.8209 | 88.4215 | 34.85 | 182.20 | 70.93 | | MR-TICP | 3.7033 | 3.3238 | 3.7356 | 85.98 | 73.21 | 64.62 | | EISCS-DTICP | 0.0213 | 0.0203 | 0.0244 | 69.06 | 46.88 | 33.62 |
|
查看原文
表 3Bottle模型在不同环境下的精确配准效果
Table3. Accurate registration results of Bottle model under different environments
| Algorithm | Registration error /(10-4 mm) | Registration time /s |
|---|
| Ideal | Non-ideal | Ideal | Non-ideal |
|---|
| TICP | 43.0950 | 44.8670 | 1.12 | 0.69 | | NV-TICP | 3.5682 | 5.5839 | 3.95 | 4.70 | | ISS-TICP | 3.5682 | 31.4097 | 4.34 | 11.42 | | MR-TICP | 3.7578 | 5.5835 | 22.21 | 62.24 | | EISCS-DTICP | 0.0446 | 0.0677 | 5.79 | 30.83 |
|
查看原文
李新春, 闫振宇, 林森. 基于邻域表面形变信息加权的点云配准[J]. 激光与光电子学进展, 2020, 57(14): 141102. Xinchun Li, Zhenyu Yan, Sen Lin. Point Cloud Registration Based on Weighting Information of Neighborhood Surface Deformation[J]. Laser & Optoelectronics Progress, 2020, 57(14): 141102.



 PDF全文
PDF全文

