基于单目视觉和棋盘靶标的平面姿态测量方法  下载: 1272次
下载: 1272次
Plane Pose Measurement Method Based on Monocular Vision and Checkerboard Target
1 军械工程学院无人机工程系, 河北 石家庄 050003
2 军械工程学院电子与光学工程系, 河北 石家庄 050003
图 & 表
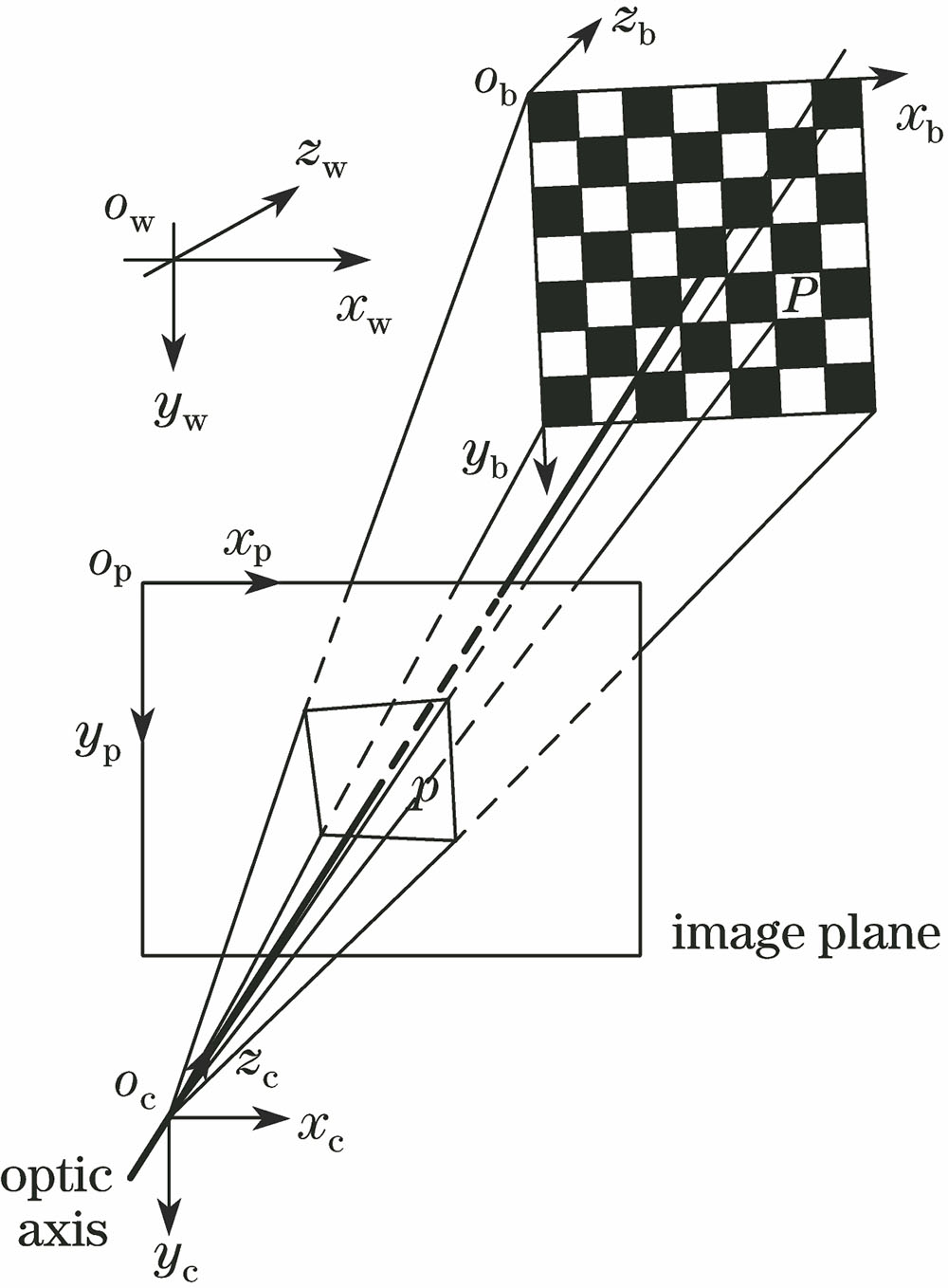
图 1. 棋盘状靶标成像示意图
Fig. 1. Sketch map of imaging of checkerboard target
下载图片 查看原文
图 2. 理想情况下靶标坐标系与世界坐标系的关系
Fig. 2. Relationship between target coordinate system and world coordinate system in ideal situation
下载图片 查看原文
图 3. 实际情况下靶标坐标系与世界坐标系的关系
Fig. 3. Relationship between target coordinate system and world coordinate system in actual situation
下载图片 查看原文
图 4. 实际图像角点和仿真图像角点对比。(a)实际图像角点;(b)仿真图像角点
Fig. 4. Comparison of actual image corner and simulation image corner. (a) Actual image corner; (b) simulation image corner
下载图片 查看原文
图 5. 单目视觉姿态测量实验系统
Fig. 5. Experimental system of monocular vision pose measurement
下载图片 查看原文
图 6. 测量精度与距离的关系
Fig. 6. Relationship between measurement precision and distance
下载图片 查看原文
图 7. 距离3 m时动态测量误差。(a)待测角度基准值;(b)外框测量误差;(c)中框测量误差;(d)内框测量误差
Fig. 7. Error of dynamic measurement when distance is 3 m. (a) Measured reference value; (b) errors of outer frame; (c) errors of middle frame; (d) errors of inner frame
下载图片 查看原文
图 8. 距离4.5 m时动态测量误差。(a)待测角度基准值;(b)外框测量误差;(c)中框测量误差;(d)内框测量误差
Fig. 8. Error of dynamic measurement when distance is 4.5 m. (a) Measured reference value; (b) errors of outer frame; (c) errors of middle frame; (d) errors of inner frame
下载图片 查看原文
表 1仿真实验结果
Table1. Results of simulation experiment(°)
| No. | Input value | Measured value | Error |
|---|
| θ | ψ | ϕ | | θ | ψ | ϕ | | θ | ψ | ϕ |
|---|
| 1 | 1 | 2 | 3 | 0.99 | 2.05 | 3.01 | -0.01 | 0.05 | 0.01 | | 2 | 3 | 6 | 9 | 3.01 | 5.97 | 9.03 | 0.01 | -0.03 | 0.03 | | 3 | 5 | 10 | 15 | 4.97 | 10.04 | 14.97 | -0.03 | 0.04 | -0.03 | | 4 | 7 | 14 | 21 | 7.05 | 14.04 | 21.02 | 0.05 | 0.04 | 0.02 | | 5 | 9 | 18 | 27 | 9.05 | 18.05 | 27.03 | 0.05 | 0.05 | 0.03 |
|
查看原文
表 2理论实验结果
Table2. Results of theoretical experiment(°)
| No. | Input value | Measured value | Error |
|---|
| θ | ψ | ϕ | | θ | ψ | ϕ | | θ | ψ | ϕ |
|---|
| 1 | 1 | 2 | 3 | 1.00001 | 2.00000 | 3 | 0.00001 | 0 | 0 | | 2 | 3 | 6 | 9 | 3.00001 | 5.99999 | 9 | 0.00001 | -0.00001 | 0 | | 3 | 5 | 10 | 15 | 5.00001 | 9.99998 | 15 | 0.00001 | -0.00002 | 0 | | 4 | 7 | 14 | 21 | 7.00000 | 14.00000 | 21 | 0 | 0 | 0 | | 5 | 9 | 18 | 27 | 9.00000 | 18.00000 | 27 | 0 | 0 | 0 |
|
查看原文
表 3不同姿态下静态实验结果
Table3. Static experimental results under different poses(°)
| No. | Standard value | Measured value | Error |
|---|
| θ | ψ | ϕ | | θ | ψ | ϕ | | θ | ψ | ϕ |
|---|
| 1 | 5.00 | 40.00 | 0.00 | 4.97 | 39.95 | 0.01 | -0.03 | -0.05 | 0.01 | | 2 | 10.00 | 30.00 | 30.00 | 10.03 | 30.04 | 30.02 | 0.03 | 0.04 | 0.02 | | 3 | 20.00 | 20.00 | 60.00 | 20.04 | 19.98 | 60.01 | 0.04 | -0.02 | 0.01 | | 4 | 30.00 | 10.00 | 130.00 | 29.96 | 9.96 | 130.02 | -0.04 | -0.04 | 0.02 | | 5 | 40.00 | 0.00 | 170.00 | 40.05 | 0.03 | 169.99 | 0.05 | 0.03 | -0.01 |
|
查看原文
表 4同一姿态下静态实验结果
Table4. Static experimental results under same poses(°)
| No. | Error | No. | Error |
|---|
| θ | ψ | ϕ | | θ | ψ | ϕ |
|---|
| 1 | 0.02 | 0.02 | -0.00 | 6 | -0.02 | 0.03 | -0.00 | | 2 | -0.05 | -0.05 | -0.00 | 7 | 0.02 | 0.02 | -0.00 | | 3 | 0.03 | -0.02 | 0.01 | 8 | -0.01 | -0.02 | 0.01 | | 4 | 0.04 | 0.04 | 0.01 | 9 | 0.02 | 0.04 | 0.01 | | 5 | 0.02 | -0.01 | -0.01 | 10 | -0.03 | -0.05 | 0.01 |
|
查看原文
表 5同一姿态下静态实验结果误差分布
Table5. Error distribution of static experimental results under same poses(°)
| Average error | Maximum absolute error | Standard deviation |
|---|
| θ | 0.00 | 0.05 | 0.03 | | ψ | 0.00 | 0.05 | 0.03 | | ϕ | 0.00 | 0.01 | 0.01 |
|
查看原文
苏建东, 齐晓慧, 段修生. 基于单目视觉和棋盘靶标的平面姿态测量方法[J]. 光学学报, 2017, 37(8): 0815002. Jiandong Su, Xiaohui Qi, Xiusheng Duan. Plane Pose Measurement Method Based on Monocular Vision and Checkerboard Target[J]. Acta Optica Sinica, 2017, 37(8): 0815002.











 PDF全文
PDF全文

