基于球体及平面模型的双Kinect空间位置的标定方法  下载: 1435次
下载: 1435次
Dual-Kinect Spatial Position Calibration Method Based on Sphere and Plane Model
北京航空航天大学仪器科学与光电工程学院, 北京 100191
图 & 表
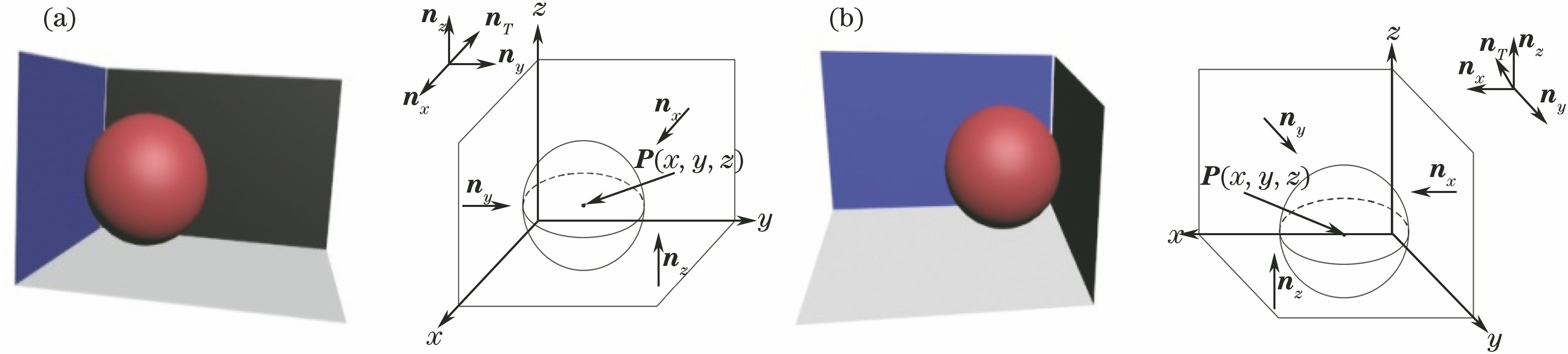
图 1. 两视角下的标定模型及参数简图。(a)视角1;(b)视角2
Fig. 1. Diagrams of two-view calibration model and parameters. (a) View 1; (b) view 2
下载图片 查看原文
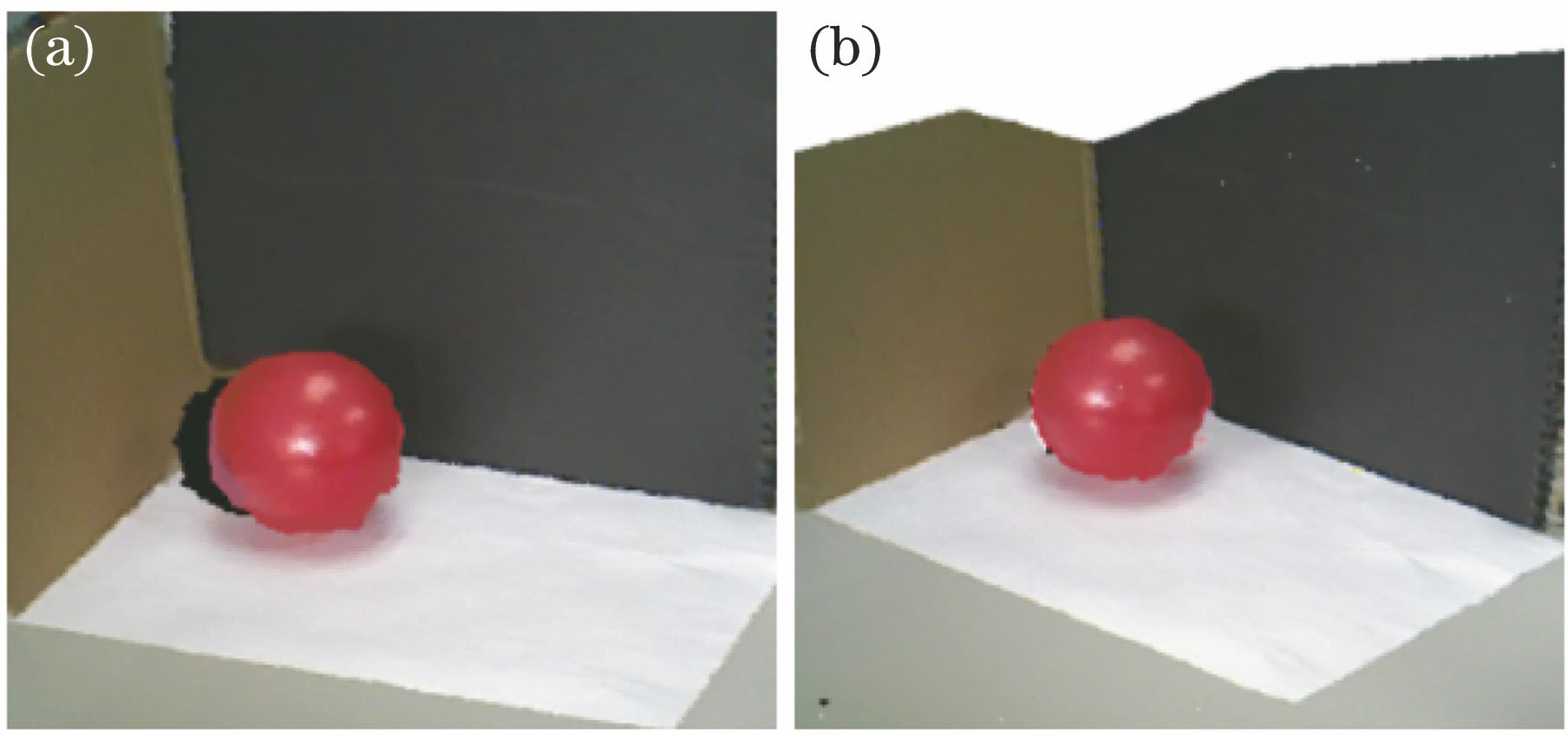
图 2. 不同Kinect视角的点云配准模型。(a)点云1;(b)点云2
Fig. 2. Point cloud calibration models with different Kinect's views. (a) Point cloud 1; (b) point cloud 2
下载图片 查看原文
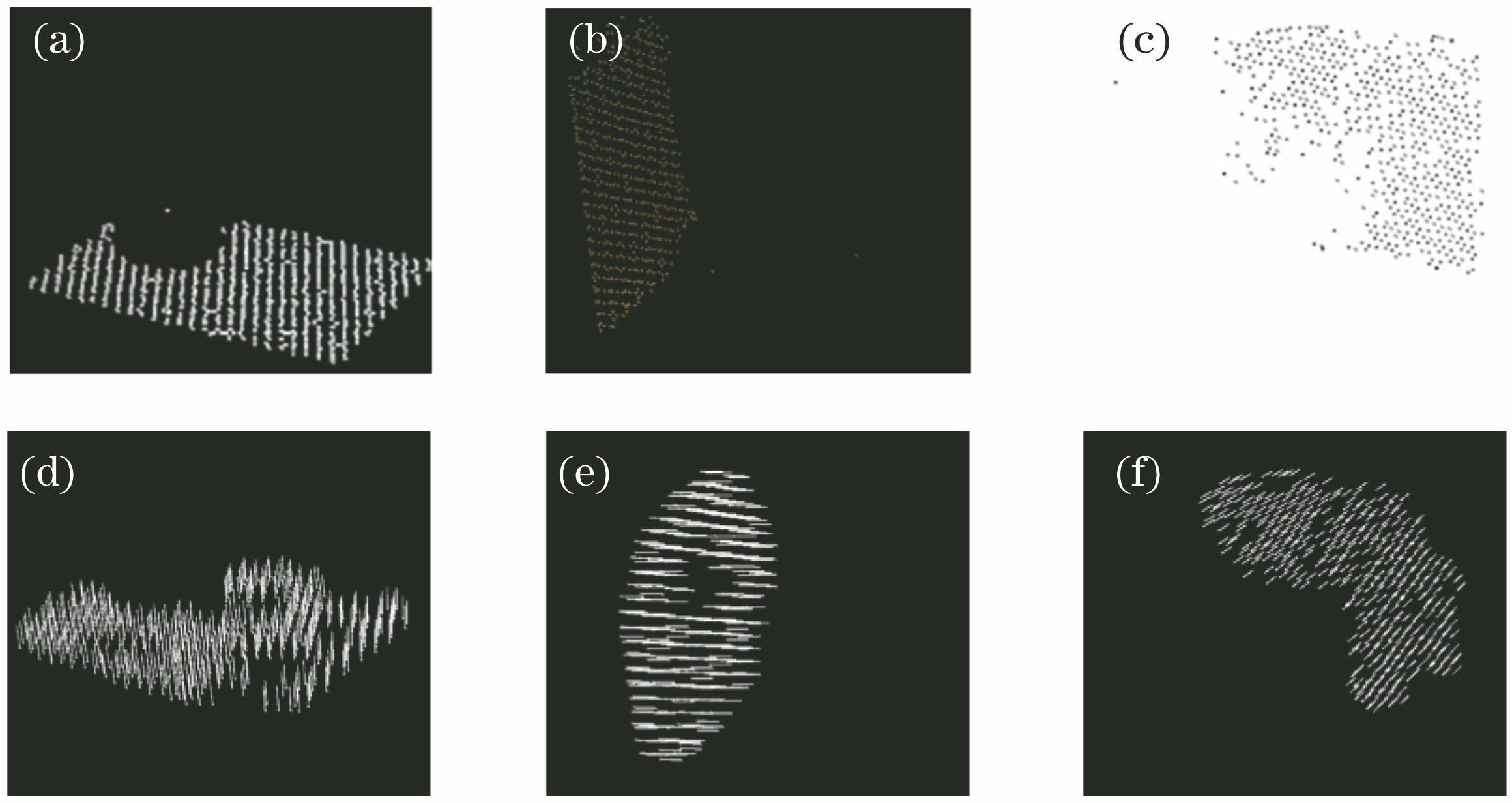
图 3. 点云的平面分割及法向量提取结果
Fig. 3. Plane segmentation and normal vector extraction results of point cloud
下载图片 查看原文
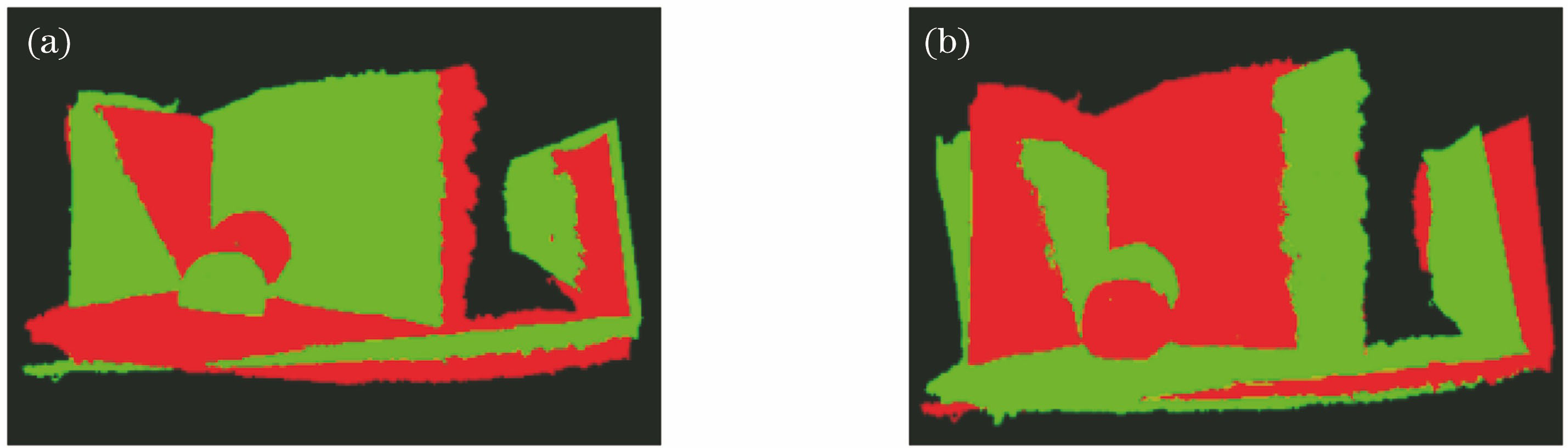
图 4. 点云法向量提取效果。(a) RANSAC算法;(b)改进后的RANSAC算法
Fig. 4. Extraction results of point cloud normal vector. (a) RANSAC algorithm; (b) improved RANSAC algorithm
下载图片 查看原文
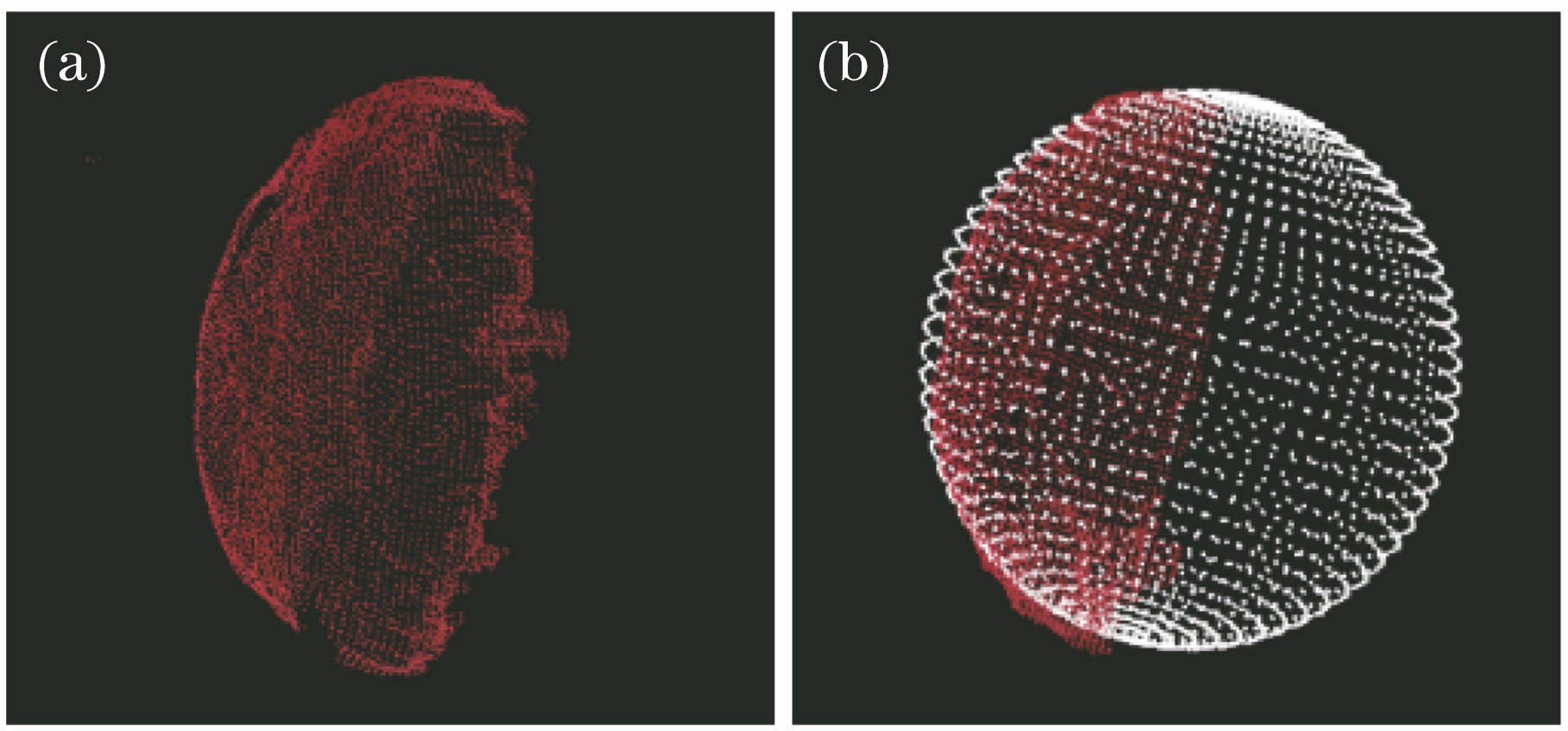
图 5. 点云中球面的(a)提取及(b)拟合效果
Fig. 5. (a) Sphere extraction and (b) sphere fitting result of point cloud
下载图片 查看原文
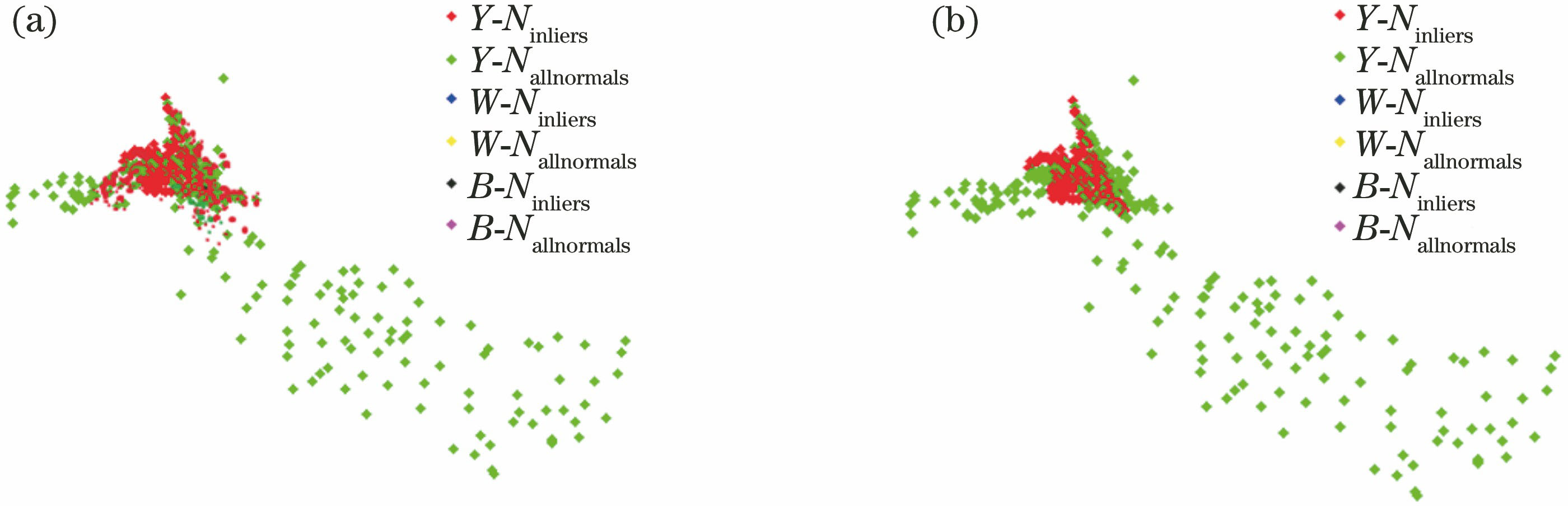
图 6. 经典ICP算法的配准效果。(a)未配准的点云;(b)配准效果
Fig. 6. Registration results of classic ICP algorithm. (a) Un-registrated point cloud; (b) registrated point cloud
下载图片 查看原文
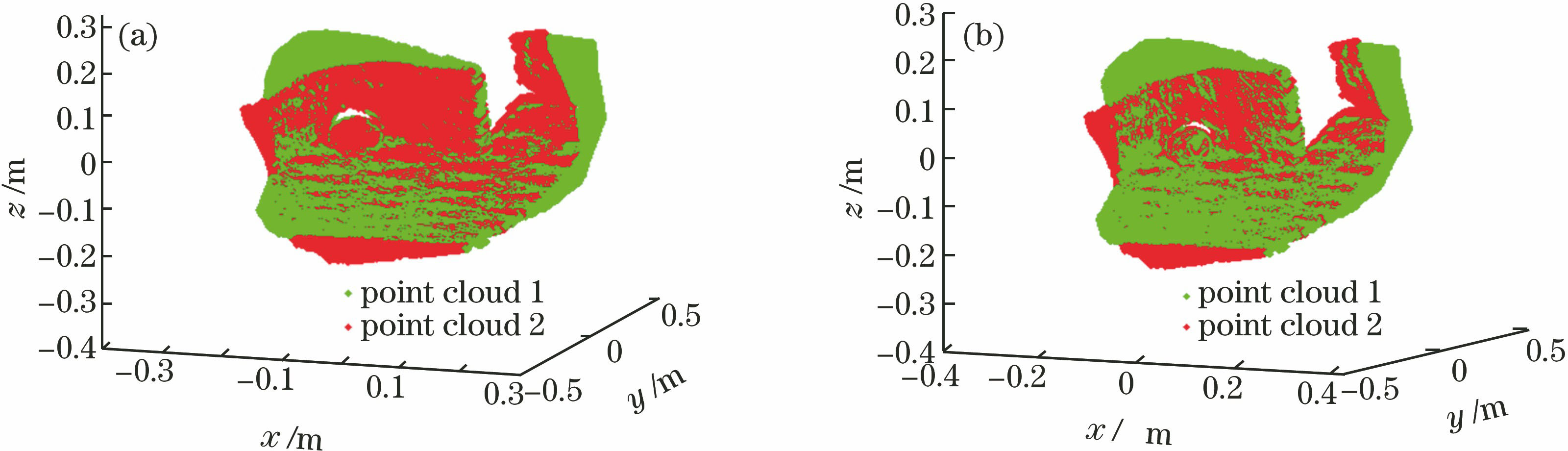
图 7. (a)自适应阈值ICP的配准效果;(b)本研究的配准效果
Fig. 7. (a) Registration result of adaptive threshold ICP; (b) registration result of proposed method in the paper
下载图片 查看原文
表 1法向量提取算法
Table1. Extraction algorithm of normal vector
| Normal vector extraction algorithm (P, T, ET, NR, Nums)1: for all pi in P2: ni←Compute Normals (pi, NR)3: end for4: while et>ET5: Temp Plane←Random Extract Points (P, Nums)6: NTempPlane←Get Normals Average (TempPlane)7: for all pi in P8: ei←abs(NTempPlane-ni)9: add ei to Ej10: if ei<T, then11: add pi to Modelj12: end if13: end for14: RE, IPNj, TPNj, Nj←Get Params From (Modelj)15: et←Calculate Termination Condition (IT, RE, IPNj, TPNj)16: end while17: return Nj |
|
查看原文
表 2利用平面交点与球心获取固定点的误差
Table2. Error between fixed points obtained by plane intersection and sphere center
| Pstd /mm | Sstd /mm | (Pstd-Sstd) /mm |
|---|
| 5.02 | 2.34 | 2.68 | | 4.86 | 2.45 | 2.41 | | 5.12 | 1.84 | 3.28 | | 4.67 | 2.03 | 2.64 | | 4.89 | 1.76 | 3.13 | | 4.87 | 2.13 | 2.74 | | 5.07 | 1.98 | 3.09 |
|
查看原文
表 3不同算法的标定精度
Table3. Calibration accuracy of different algorithms
| S /mm | A /(°) |
|---|
| ICP | Improved ICP | Our method | ICP | Improved ICP | Our method | | 21 | 12 | 7 | 15 | 3 | 2 | | 25 | 13 | 4 | 19 | 3 | 1 | | 29 | 10 | 5 | 18 | 4 | 2 | | 22 | 13 | 3 | 17 | 5 | 2 | | 24 | 9 | 5 | 19 | 3 | 1 | | 21 | 7 | 4 | 16 | 4 | 4 |
|
查看原文
表 4不同算法的耗时
Table4. Time consuming of different algorithms
| Algorithm | Time-consuming /s |
|---|
| ICP | 20.1 | | Improved ICP | 15.2 | | Our method | 3.4 |
|
查看原文
欧攀, 周锴, 吴帅. 基于球体及平面模型的双Kinect空间位置的标定方法[J]. 激光与光电子学进展, 2018, 55(4): 042802. Pan Ou, Kai Zhou, Shuai Wu. Dual-Kinect Spatial Position Calibration Method Based on Sphere and Plane Model[J]. Laser & Optoelectronics Progress, 2018, 55(4): 042802.




 PDF全文
PDF全文

