基于反残差结构的轻量级多目标检测网络  下载: 1088次
下载: 1088次
Light-Weight Multi-Object Detection Network Based on Inverted Residual Structure
辽宁工程技术大学软件学院, 辽宁 葫芦岛 125105
图 & 表
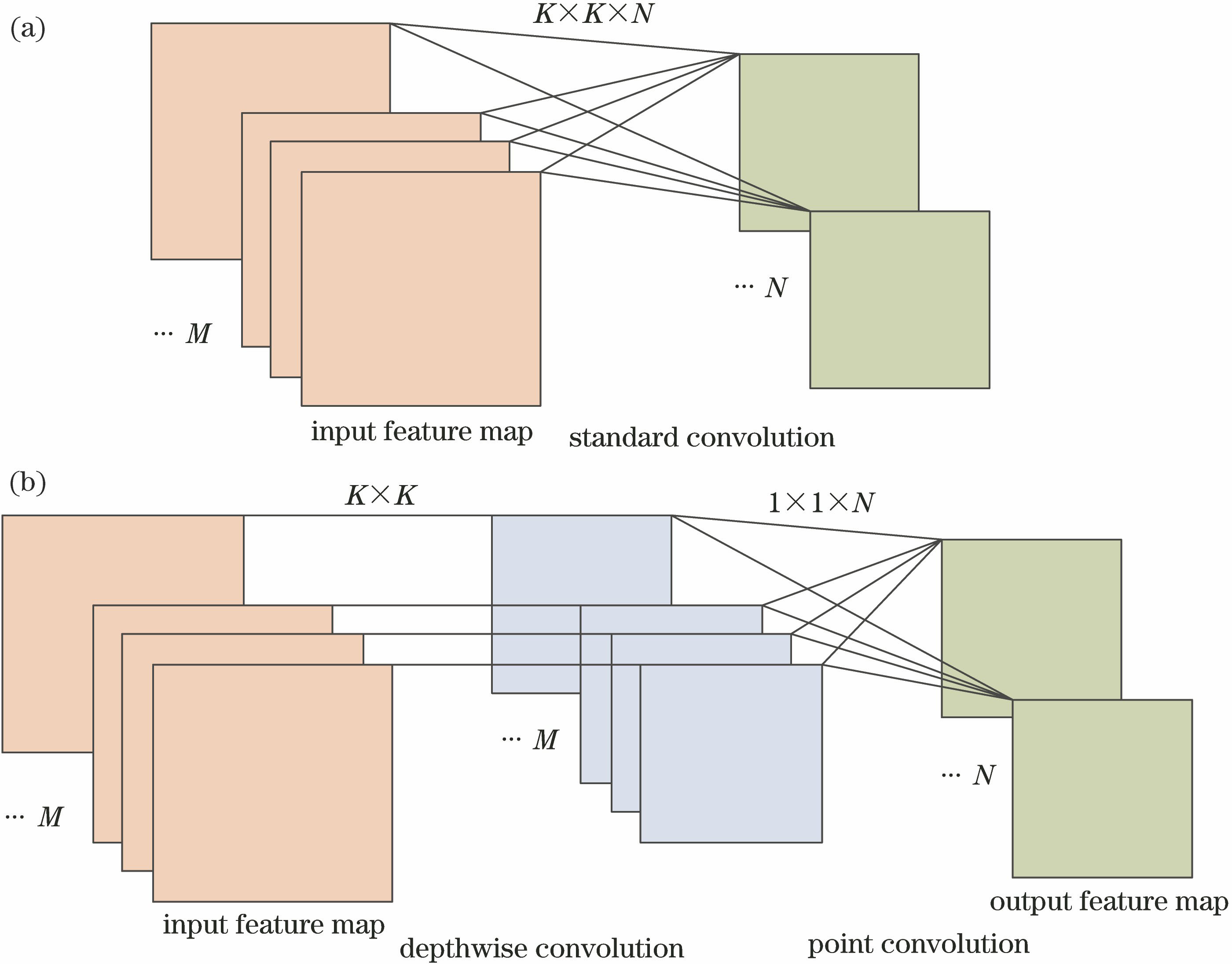
图 1. 深度可分离卷积解耦过程图。(a)标准卷积;(b)深度可分离卷积
Fig. 1. Decoupling process of the depth separable convolution. (a) Standard convolution; (b) depth separable convolution
下载图片 查看原文
图 2. 残差结构与反残差结构。(a)残差结构;(b)步长为1的反残差结构
Fig. 2. Residual block and inverted residual block. (a) Residual block; (b) inverted residual block when stride is 1
下载图片 查看原文
图 3. IR-YOLO网络框架
Fig. 3. IR-YOLO network architecture
下载图片 查看原文
图 4. 训练损失图
Fig. 4. Train loss curves
下载图片 查看原文
图 5. 检测精度直方图
Fig. 5. Class detection accuracy histogram
下载图片 查看原文
图 6. 实验效果对比。(a)(d)原始输入图像;(b)(e) YOLOv3-Tiny模型检测结果;(c)(f) IR-YOLO模型检测结果
Fig. 6. Comparison of detection results. (a)(d) Original input images ; (b)(e) detection results with YOLOv3-Tiny Model; (c)(f) detection results with IR-YOLO Model
下载图片 查看原文
表 1反残差块参数
Table1. Parameters of inverted residual block
| Input | Operation | Output |
|---|
| h×w×k | 1×1 pointconv, ReLU | h×w×2k | | h×w×2k | 3×3/sdepth conv, ReLU | × ×2k | | × ×2k | 1×1 pointconv, linear | × ×2k |
|
查看原文
表 2VOC数据集
Table2. VOC dataset
| Category | Train set | Test set |
|---|
| Aeroplane | 1171 | 285 | | Bicycle | 1064 | 337 | | Bird | 1605 | 459 | | Boat | 1140 | 263 | | Bottle | 1764 | 469 | | Bus | 822 | 213 | | Car | 3267 | 1201 | | Cat | 1593 | 358 | | Chair | 3152 | 756 | | Cow | 847 | 244 | | Dining table | 824 | 206 | | Dog | 2025 | 489 | | Horse | 1072 | 348 | | Motor bike | 1052 | 325 | | Person | 13256 | 4528 | | Potted plant | 1487 | 480 | | Sheep | 1070 | 242 | | Sofa | 814 | 239 | | Train | 925 | 282 | | TV monitor | 1108 | 308 | | Total | 40058 | 12032 |
|
查看原文
表 3超参数
Table3. Hyper parameters
| Parameters name | Value |
|---|
| Batch | 64 | | Momentum | 0.9 | | Weight decay | 0.0005 | | Learning rate | 0.001 |
|
查看原文
表 4浮点运算次数对比
Table4. Comparison on number of floating point operations
| Input | Output | Number of floatingpoint operations instandard conv /109 | Number of floating pointoperations in inverted residual block /109 |
|---|
| Expand point conv | Depth conv | Squeeze point conv |
|---|
| 208×208×16 | 208×208×32 | 0.399 | 0.044 | 0.025 | 0.089 | | 104×104×32 | 104×104×64 | 0.399 | 0.044 | 0.012 | 0.089 | | 52×52×64 | 52×52×128 | 0.399 | 0.044 | 0.006 | 0.089 | | 26×26×128 | 26×26×256 | 0.399 | 0.044 | 0.003 | 0.089 | | 13×13×256 | 13×13×512 | 0.399 | 0.044 | 0.002 | 0.089 | | 13×13×512 | 13×13×1024 | 1.595 | 0.177 | 0.003 | 0.354 |
|
查看原文
表 5IR-YOLO模型与YOLOv3-Tiny模型检测速度对比
Table5. Comparison detection speed of IR-YOLO model and YOLOv3-Tiny model
| Model | CPU speed /(frame·s-1) | GPU speed /(frame·s-1) |
|---|
| YOLOv3-Tiny | 1.2 | 31.3 | | IR-YOLO | 1.7 | 31.2 |
|
查看原文
表 6不同训练次数mAP对比
Table6. Comparison mAP of different training numbers
| Trainingnumber | YOLOv3-TinymAP /% | IR-YOLOmAP /% |
|---|
| 65000 | 45.15 | 43.33 | | 75000 | 45.60 | 44.37 | | 85000 | 45.17 | 45.23 | | 90000 | 42.75 | 44.20 | | 95000 | 42.76 | 46.07 |
|
查看原文
表 7IR-YOLO模型与YOLOv3-Tiny模型在VOC数据集上检测结果对比
Table7. Comparison of detection results of IR-YOLO and YOLOv3-Tiny on VOC dataset%
| Category | YOLOv3-Tiny | IR-YOLO |
|---|
| Aeroplane | 54.78 | 56.38 | | Bicycle | 60.79 | 57.86 | | Bird | 27.24 | 28.19 | | Boat | 27.9 | 28.92 | | Bottle | 14.8 | 17.58 | | Bus | 56.98 | 58.48 | | Car | 63.8 | 64.05 | | Cat | 50.39 | 53.57 | | Chair | 25.77 | 23.25 | | Cow | 46.43 | 45.48 | | Dining table | 39.66 | 45.48 | | Dog | 46.09 | 45.68 | | Horse | 66.62 | 62.45 | | Motor bike | 64.09 | 62.85 | | Person | 59.23 | 59.4 | | Potted plant | 18.22 | 17.22 | | Sheep | 47.57 | 44.68 | | Sofa | 39.39 | 43.11 | | Train | 54.02 | 58.25 | | TV monitor | 50.34 | 48.62 | | mAP | 45.60 | 46.07 |
|
查看原文
刘万军, 高明月, 曲海成, 刘腊梅. 基于反残差结构的轻量级多目标检测网络[J]. 激光与光电子学进展, 2019, 56(22): 221003. Wanjun Liu, Mingyue Gao, Haicheng Qu, Lamei Liu. Light-Weight Multi-Object Detection Network Based on Inverted Residual Structure[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221003.








 PDF全文
PDF全文

