基于水平树结构的可变权重代价聚合立体匹配算法  下载: 976次
下载: 976次
Variable Weight Cost Aggregation Algorithm for Stereo Matching Based on Horizontal Tree Structure
江南大学轻工过程先进控制教育部重点实验室, 江苏 无锡 214122
图 & 表
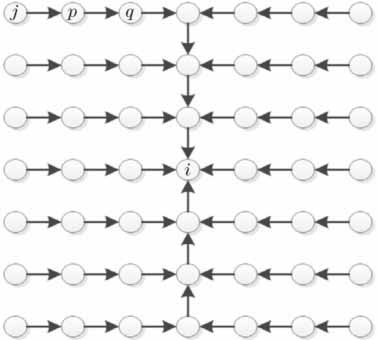
图 1. 基于水平树结构的权值传播
Fig. 1. Weight propagation based on horizontal tree structure
下载图片 查看原文
图 2. 权值支持区域图(红色方框为中心像素,邻域像素亮度值表示对中心像素的支持权重)。(a)图像局部块;(b)未采用代价再聚合的支持权重图;(c)采用代价再聚合的支持权重图
Fig. 2. Support weights for selected regions (the brightness value of neighborhood pixel represents the support weight for central pixel which is marked with red box). (a) Image partial block; (b) support weight map without iterative cost aggregation; (c) support weight map after iterative cost aggregation
下载图片 查看原文
图 3. 采用代价再聚合前后的视差变化图。(a) Reindeer左图像;(b) Reindeer右图像;(c)未采用代价再聚合得到的左视差图;(d)采用代价再聚合得到的左视差图
Fig. 3. Disparity variation maps computed before and after iterative cost aggregation. (a) Reindeer left image; (b) Reindeer right image; (c) left disparity map computed before iterative cost aggregation; (d) left disparity map computed after iterative cost aggregation
下载图片 查看原文
图 4. 视差后处理的机理。(a) Dolls左图像;(b) Dolls右图像;(c)左右一致性检测;(d)未进行视差后处理的初始左视差图
Fig. 4. Principle of disparity refinement. (a) Dolls left image; (b) Dolls right image; (c) left-right consistence test; (d) initial left disparity map without disparity refinement
下载图片 查看原文
图 5. 采用不同视差后处理方法得到的视差图。(a)文献[
11]的视差后处理方法;(b)改进的视差后处理方法
Fig. 5. Disparity maps with different disparity refinement methods. (a) Disparity refinement method in Ref. [11]; (b) improved disparity refinement method
下载图片 查看原文
图 6. 不同代价聚合算法得到的视差图(红色区域为误匹配像素点)。(a)真实视差图;(b)最小生成树;(c)跨尺度最小生成树;(d)引导滤波;(e)跨尺度分割树;(f)文献[
11]代价聚合算法;(g)改进的代价聚合算法
Fig. 6. Disparity maps obtained by different cost aggregation algorithms (mismatched pixels are marked in red area). (a) Real disparity map; (b) by minimum spanning tree; (c) by cross-scale minimum spanning tree; (d) by guided filtering; (e) by cross-scale segment tree; (f) by cost aggregation algorithm in Ref. [11]; (g) by improved cost aggregation algorithm
下载图片 查看原文
图 7. Middlebury 标准图像实验结果。(a)左参考图像;(b)右参考图像;(c)左真实视差图;(d)文献[
11]的视差后处理方法;(e)改进的视差后处理方法
Fig. 7. Experimental results of the Middlebury benchmark images. (a) Left reference images; (b) right reference images; (c) left real disparity maps; (d) by disparity refinement method in Ref. [11]; (e) by improved disparity refinement method
下载图片 查看原文
表 1本文立体匹配算法参数
Table1. Parameters of the proposed stereo matching algorithm
| Parameter | α | Tc | Tg | σ | psmooth | k | k1 |
|---|
| Value | 0.11 | 7 | 2 | 255×0.08 | 2 | 0.5 | 0.1 |
|
查看原文
表 2不同立体匹配算法在未进行视差后处理的非遮挡区域中的匹配误差(单位:%)
Table2. Error of different stereo matching methods in non-occluded areas without disparity refinement (unit: %)
| Stereo pair | MST | CS-MST | GF | CS-ST | LSECVR | Proposed |
|---|
| Tsukuba | 2.124 | 1.571 | 2.516 | 1.742 | 2.295 | 1.773 | | Venus | 0.843 | 1.384 | 2.036 | 1.455 | 0.562 | 0.341 | | Teddy | 7.615 | 5.533 | 8.486 | 6.074 | 4.912 | 4.251 | | Cones | 4.104 | 4.155 | 3.613 | 4.426 | 3.442 | 3.361 | | Aloe | 4.143 | 4.634 | 5.536 | 4.715 | 2.882 | 2.671 | | Art | 9.794 | 10.796 | 9.033 | 10.505 | 6.722 | 6.461 | | Baby1 | 7.375 | 8.396 | 4.694 | 4.533 | 2.882 | 2.591 | | Baby2 | 11.954 | 13.375 | 6.083 | 15.116 | 2.612 | 1.601 | | Baby3 | 5.643 | 7.256 | 5.794 | 6.235 | 3.682 | 3.661 | | Books | 9.563 | 10.266 | 10.224 | 10.245 | 6.712 | 5.631 | | Bowling1 | 16.814 | 20.895 | 14.523 | 21.726 | 8.822 | 6.591 | | Bowling2 | 9.314 | 10.155 | 7.083 | 11.186 | 4.882 | 3.401 | | Cloth1 | 0.513 | 0.614 | 1.086 | 0.665 | 0.272 | 0.151 | | Cloth2 | 2.853 | 4.136 | 3.464 | 4.045 | 1.432 | 1.071 | | Cloth3 | 1.773 | 2.665 | 2.154 | 2.726 | 1.412 | 1.061 | | Cloth4 | 1.303 | 1.876 | 1.624 | 1.755 | 1.132 | 1.101 | | Dolls | 5.003 | 5.956 | 5.044 | 5.525 | 3.112 | 2.901 | | Flowerpots | 16.675 | 19.416 | 12.793 | 15.224 | 12.662 | 11.431 | | Lampshade1 | 10.433 | 11.996 | 11.575 | 10.614 | 9.002 | 8.221 | | Lampshade2 | 20.885 | 18.204 | 21.136 | 12.083 | 7.422 | 5.781 | | Laundry | 13.694 | 12.943 | 16.406 | 14.515 | 11.072 | 10.701 | | Midd1 | 32.325 | 27.853 | 40.116 | 26.951 | 27.622 | 29.524 | | Midd2 | 34.505 | 32.094 | 35.856 | 24.561 | 25.513 | 25.092 | | Moebius | 7.671 | 8.695 | 9.256 | 8.554 | 8.112 | 8.163 | | Monopoly | 22.511 | 24.212 | 27.996 | 25.503 | 26.374 | 27.145 | | Plastic | 42.534 | 47.036 | 39.292 | 42.725 | 40.713 | 34.871 | | Reindeer | 9.155 | 9.876 | 7.233 | 8.334 | 5.082 | 3.671 | | Rocks1 | 2.233 | 2.836 | 2.705 | 2.644 | 1.142 | 0.911 | | Rocks2 | 1.573 | 2.086 | 1.614 | 1.905 | 0.812 | 0.781 | | Wood1 | 8.685 | 11.066 | 4.833 | 5.964 | 0.241 | 0.252 | | Wood2 | 0.993 | 5.615 | 2.344 | 6.426 | 0.632 | 0.621 | | Average rank | 3.653 | 4.876 | 4.455 | 4.424 | 2.192 | 1.421 | | Average error | 10.56 | 11.21 | 10.52 | 10.28 | 7.55 | 6.96 |
|
查看原文
表 3不同立体匹配算法视差后处理在全图像区域的匹配误差(单位:%)
Table3. Matching error of different stereo matching methods in image areas with disparity refinement (unit: %)
| Stereo pair | LSECVR | Proposed | Stereo pair | LSECVR | Proposed |
|---|
| Tsukuba | 3.631 | 4.012 | Dolls | 17.812 | 12.811 | | Venus | 2.481 | 3.232 | Flowerpots | 20.831 | 22.262 | | Teddy | 16.082 | 11.831 | Lampshade1 | 23.842 | 22.291 | | Cones | 14.112 | 11.261 | Lampshade2 | 28.792 | 21.031 | | Aloe | 11.371 | 11.862 | Laundry | 26.562 | 23.261 | | Art | 25.412 | 21.371 | Midd1 | 38.732 | 34.271 | | Baby1 | 8.802 | 8.451 | Midd2 | 33.142 | 28.711 | | Baby2 | 9.792 | 5.781 | Moebius | 18.661 | 19.082 | | Baby3 | 14.481 | 15.612 | Monopoly | 34.032 | 33.651 | | Books | 18.932 | 18.011 | Plastic | 41.281 | 41.672 | | Bowling1 | 26.192 | 23.441 | Reindeer | 15.932 | 13.921 | | Bowling2 | 19.142 | 18.901 | Rocks1 | 13.132 | 10.061 | | Cloth1 | 14.552 | 10.341 | Rocks2 | 14.552 | 10.351 | | Cloth2 | 17.032 | 12.461 | Wood1 | 9.161 | 9.222 | | Cloth3 | 11.622 | 11.411 | Wood2 | 8.801 | 8.822 | | Cloth4 | 18.172 | 17.731 | Average rank | 1.712 | 1.291 | | Average error | 18.61 | 16.68 | | | |
|
查看原文
彭建建, 白瑞林. 基于水平树结构的可变权重代价聚合立体匹配算法[J]. 光学学报, 2018, 38(1): 0115002. Jianjian Peng, Ruilin Bai. Variable Weight Cost Aggregation Algorithm for Stereo Matching Based on Horizontal Tree Structure[J]. Acta Optica Sinica, 2018, 38(1): 0115002.









 PDF全文
PDF全文

