激光与光电子学进展, 2018, 55 (1): 012803, 网络出版: 2018-09-10
基于建筑物激光点云边缘线自动提取提高DSM精度  下载: 1010次
下载: 1010次
Digital Surface Model Accuracy Improvement Based on Edge Line Automatic Extraction of Building Laser Point Cloud
图 & 表
图 1. 有遮挡缺失的机载激光扫描点云及其重建DSM。(a)原始点云;(b)重建TIN模型;(c)重建DSM
Fig. 1. Airborne laser scanning point cloud with missing due to blocking and its reconstructed DSM. (a) Original laser point cloud; (b) reconstructed TIN model; (c) reconstructed DSM
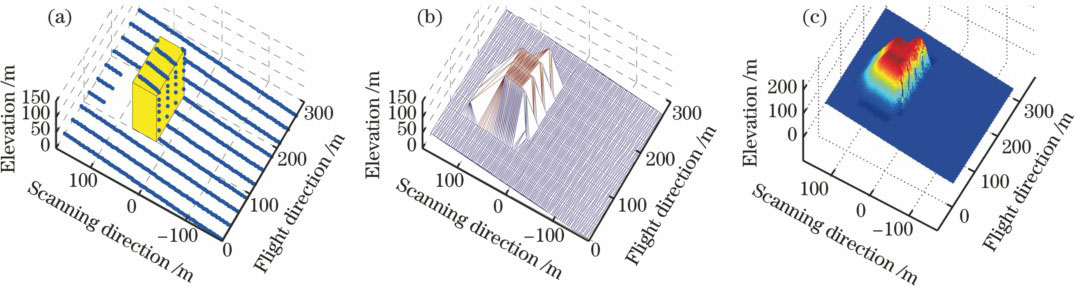
图 2. 建筑物顶面边缘点及顶点的提取结果。(a)矩形顶面;(b)圆形顶面
Fig. 2. Extraction of edge points and vertexes for top surface of building. (a) Rectangular top surface; (b) round top surface
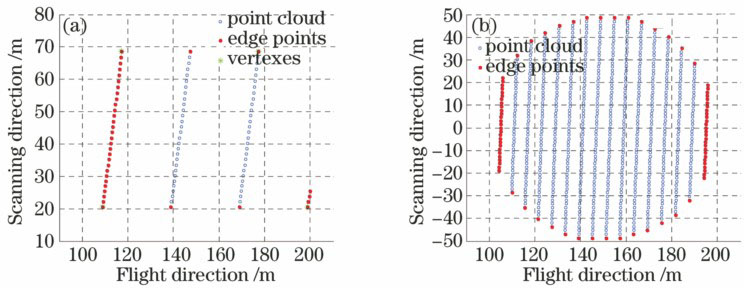
图 3. 模拟地形激光扫描点云及补充前后点云重建DSM。(a)模拟地形原始点云;(b)原始点云重建TIN模型;(c)原始点云重建DSM
Fig. 3. Laser scanning point cloud of simulative terrain and reconstructed DSM with point cloud before and after supplementation. (a) Original laser point cloud of simulative terrain; (b) reconstructed TIN model with original point cloud; (c) reconstructed DSM with original point cloud
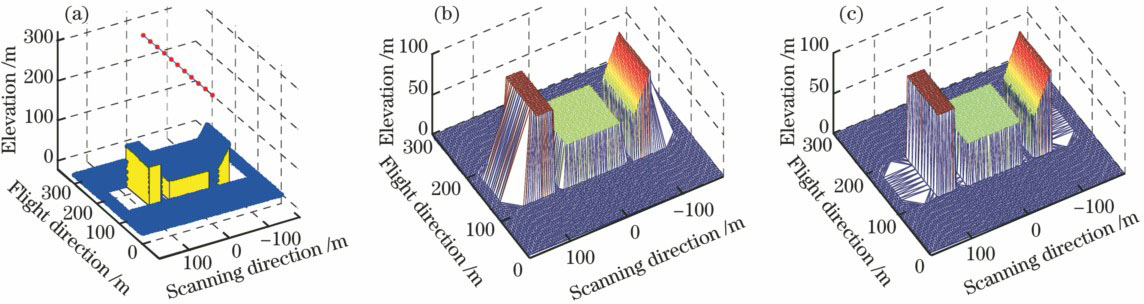
图 4. 补充边缘点前后不同插值方法得到的网格采样点高程值及其DSM。(a) cubic插值高程;(b) linear插值高程;(c) nearest 插值高程;(d)原始点云cubic插值DSM;(e)原始点云linear插值DSM;(f)原始点云nearest插值DSM;(g)补充边缘点后的cubic插值DSM;(h)补充边缘点后的linear插值DSM;(i)补充边缘点后的nearest插值DSM
Fig. 4. Elevations of points using different interpolation methods and reconstructed DSMs with point clouds before and after supplementation. (a) Interpolation elevations using cubic method; (b) interpolation elevations using linear method; (c) interpolation elevations using nearest method; (d) reconstructed DSM from original point cloud using cubic method; (e) reconstructed DSM from original point cloud using linear method; (f) reconstructed DSM from original point cloud using nearest method; (g) recon
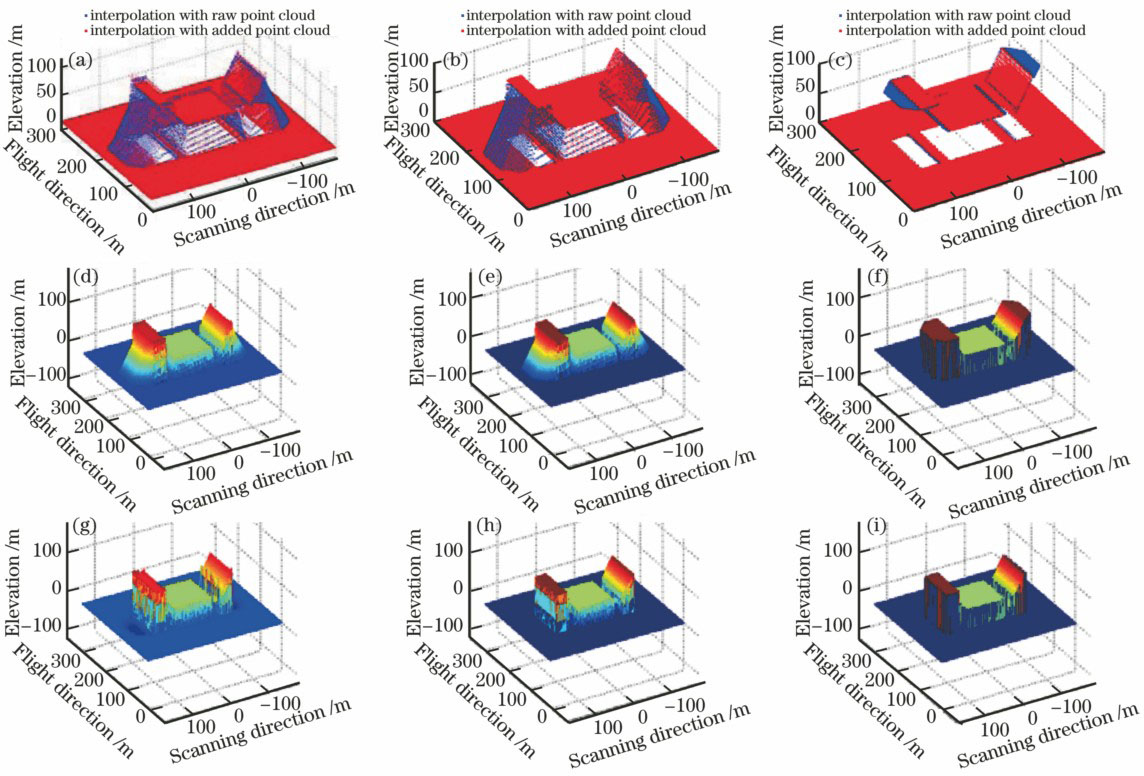
表 1不同插值算法下DSM各项精度指标
Table1. Precision of DSM at different interpolation methods
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
表 2不同差值算法下em、ds和erms的误差降低比例
Table2. Proportional reduction of error of em, ds and erms at different interpolation methods
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
苗松, 王建军, 李云龙, 范媛媛. 基于建筑物激光点云边缘线自动提取提高DSM精度[J]. 激光与光电子学进展, 2018, 55(1): 012803. Miao Song, Wang Jianjun, Li Yunlong, Fan Yuanyuan. Digital Surface Model Accuracy Improvement Based on Edge Line Automatic Extraction of Building Laser Point Cloud[J]. Laser & Optoelectronics Progress, 2018, 55(1): 012803.



 PDF全文
PDF全文

