面向无人机飞控平台的实时道路目标深度神经网络检测方法  下载: 1032次
下载: 1032次
Method of Real-Time Road Target Depth Neural Network Detection for UAV Flight Control Platform
西安科技大学机械工程学院, 陕西 西安 710054
图 & 表
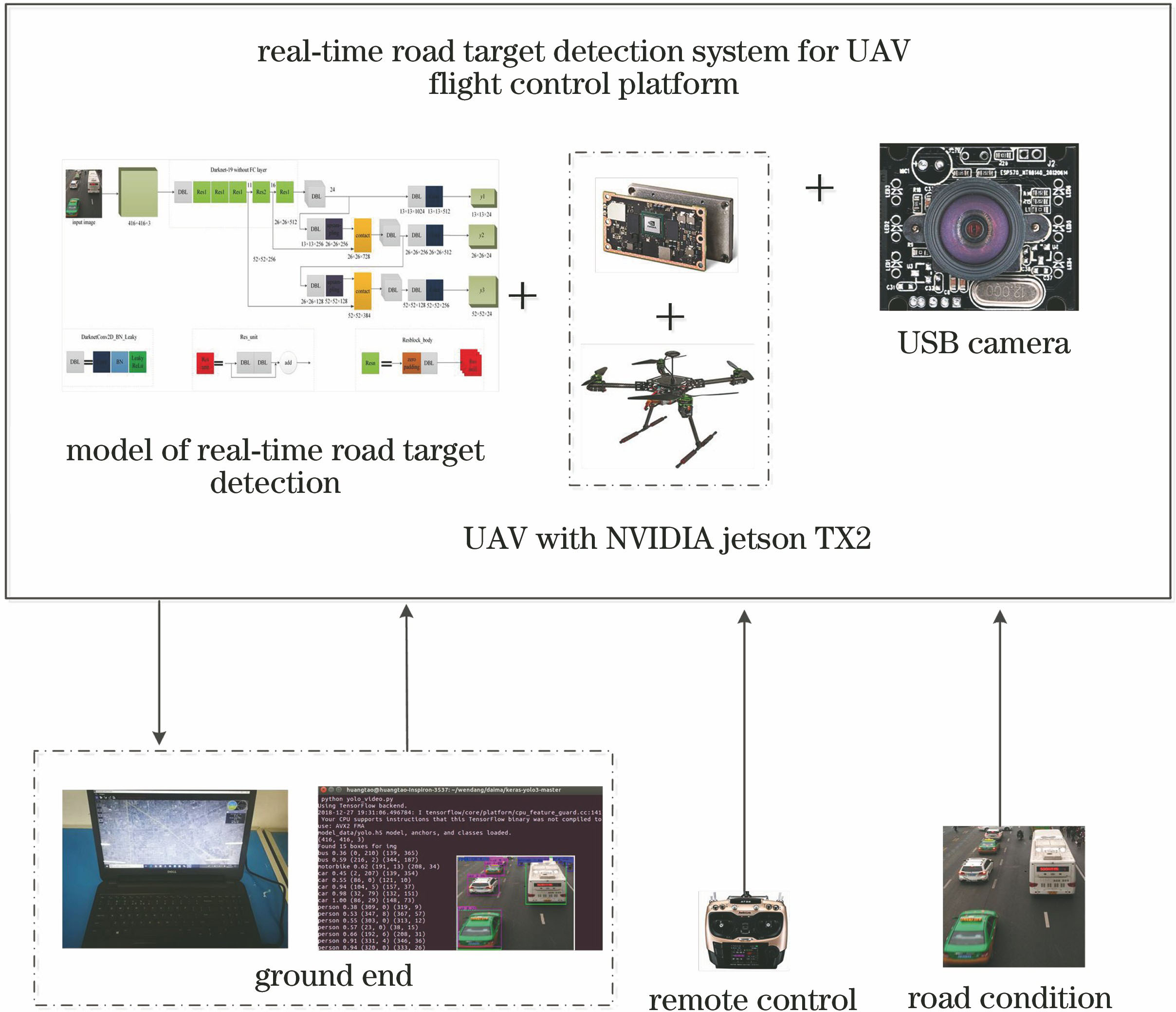
图 1. 面向UAV飞控平台的实时道路目标深度神经网络检测系统
Fig. 1. System of real-time road target depth neural network detection for UAV flight control platform
下载图片 查看原文
图 2. 基于深度神经网络的实时道路目标检测模型
Fig. 2. Model of real-time road target detection based on deep neural network
下载图片 查看原文
图 3. 残差块
Fig. 3. Residual block
下载图片 查看原文
图 4. Sigmoid函数
Fig. 4. Sigmoid function
下载图片 查看原文
图 5. 13×13尺度特征图的预测边界框示意图
Fig. 5. Schematic of the predicted bounding box of the 13×13 scale feature map
下载图片 查看原文
图 6. Pascal VOC2007、Pascal VOC2012以及自己制作VOC数据集图像
Fig. 6. Pascal VOC2007, Pascal VOC2012 and self-made VOC data set images by ourselves
下载图片 查看原文
图 7. 训练损失图
Fig. 7. Map of training loss
下载图片 查看原文
图 8. 重叠图像目标检测。(a1)(b1)为YOLOv2的重叠图像检测效果图;(a2)(b2)为我们模型重叠图像检测效果图;(a3)(b3)为YOLOv3的重叠图像检测效果图
Fig. 8. Target detection of overlapping images. (a1) and (b1) are the overlapping image detection effect of YOLOv2; (a2) and (b2) are the overlapping image detection effect of our model; (a3) and (b3) are the overlapping image detection effect of YOLOv3
下载图片 查看原文
图 9. 不同场景目标检测。(a1)(b1)(c1)为YOLOv2目标检测效果图;(a2)(b2)(c2)为我们模型目标检测效果图;(a3)(b3)(c3)为YOLOv3目标检测效果图
Fig. 9. Target detection of different scenes. (a1) (b1) and (c1) are the object detection effect images of YOLOv2; (a2) (b2) and (c2) are the object detection effect images of our model; (a3) (b3) and (c3) are the object detection effect images of YOLOv3
下载图片 查看原文
图 10. NVIDIA Jetson TX2对真实道路目标进行检测。(a1)(b1)(c1)为YOLOv2目标检测效果图;(a2)(b2)(c2)为本模型目标检测效果图;(a3)(b3)(c3)为YOLOv3目标检测效果图
Fig. 10. NVIDIA Jetson TX2 on real road target inspection. (a1) (b1) and (c1) are the object detection effect images of YOLOv2; (a2) (b2) and (c2) are the object detection effect images of our model; (a3) (b3) and (c3) are the object detection effect images of YOLOv3
下载图片 查看原文
图 11. 对不同目标进行检测。(a)本模型对小轿车、公共汽车和行人的检测;(b)本模型对卡车的检测
Fig. 11. Detection for different targets. (a) Detection for car, bus and person in our model; (b) detection for truck in our model
下载图片 查看原文
表 1训练参数
Table1. Training parameters
| Name | Value |
|---|
| Momentum | 0.9 | | Decay | 0.0005 | | Learning rate | learning _rate is 0.001,Step is 40000,45000,Scales is 0.1,0.1 | | Batch | 64 | | Epoch | 100 | | Angle | 0 | | Saturation | 1.5 | | Exposure | 1.5 | | Hue | 0.1 |
|
查看原文
表 2目标检测性能对比
Table2. Comparison of target detection performance
| Model | mAP/% | Recall/% | FPS |
|---|
| YOLOv2 | 72.48 | 78.96 | 19 | | Our | 82.29 | 86.7 | 20 | | YOLOv3 | 86.20 | 89.49 | 13 |
|
查看原文
表 3不同数据集目标检测性能对比
Table3. Comparison of target detection performance on different data sets
| Data set | mAP /% | Recall /% | FPS |
|---|
| Pascal VOC2007 | 83.58 | 87.37 | 20 | | Pascal VOC2012 | 84.32 | 88.45 | 20 | | Self-made VOCdata sets | 84.20 | 88.32 | 19 |
|
查看原文
黄涛, 赵栓峰, 拜云瑞, 耿龙龙. 面向无人机飞控平台的实时道路目标深度神经网络检测方法[J]. 激光与光电子学进展, 2020, 57(4): 041509. Tao Huang, Shuanfeng Zhao, Yunrui Bai, Longlong Geng. Method of Real-Time Road Target Depth Neural Network Detection for UAV Flight Control Platform[J]. Laser & Optoelectronics Progress, 2020, 57(4): 041509.














 PDF全文
PDF全文

