基于前景感知的时空相关滤波跟踪算法  下载: 939次
下载: 939次
Foreground-Aware Based Spatiotemporal Correlation Filter Tracking Algorithm
虞跃洋 1,2,3,4,5,*史泽林 1,2,3,4,5刘云鹏 2,3,4,5
1 中国科学技术大学信息科学技术学院, 安徽 合肥 230026
2 中国科学院沈阳自动化研究所, 辽宁 沈阳 110016
3 中国科学院机器人与智能制造创新研究院, 辽宁 沈阳 110016
4 中国科学院光电信息处理重点实验室, 辽宁 沈阳 110016
5 辽宁省图像理解与视觉计算重点实验室, 辽宁 沈阳 110016
图 & 表
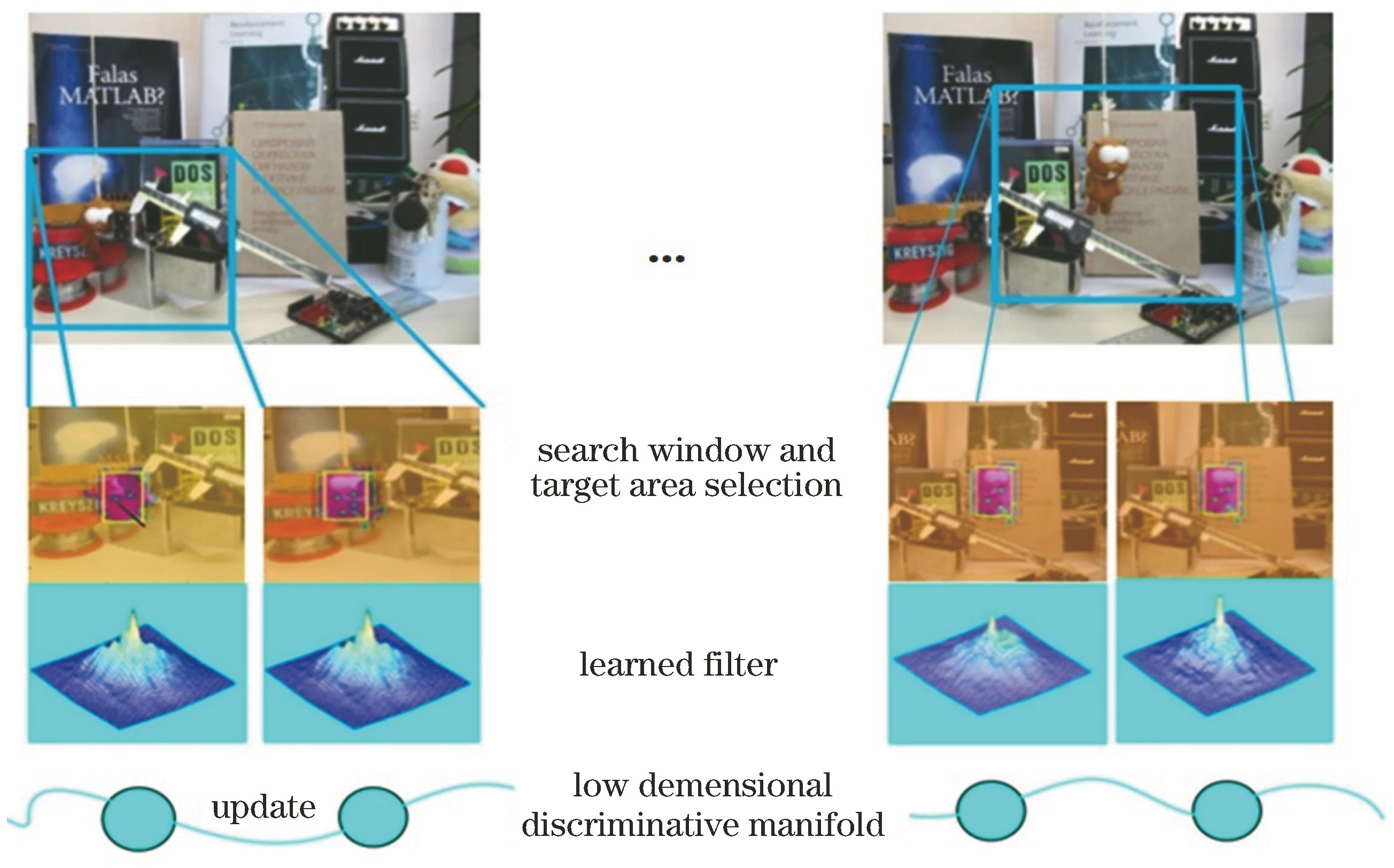
图 1. 用序列Tiger说明具有目标区域选择功能的时间一致性约束
Fig. 1. Temporal consistency constraints with object area selection function explained by sequence Tiger
下载图片 查看原文
图 2. 以一维向量为例。假设目标大小D=3。左侧是一个L=5的一维信号xi,xi[Δτj]图像是所有循环移位所得的结果,它通过左乘掩模矩阵P,可以得到5个长度为3的一维向量,其中前3行是与目标大小一致的真实的正样本
Fig. 2. Take one-dimensional vector as example, assuming length of target is D=3. Left side is one-dimensional signal xi with L=5. xi[Δτj] image is result of all cyclic shifts. Five one-dimensional vectors with length of 3 can be obtained by multiplying mask matrix P on this image, where first 3 rows are real positive samples with same size of object
下载图片 查看原文
图 3. 传统相关滤波器和本文方法训练样本对比。(a)传统相关滤波器的循环移位训练样本;(b)前景感知相关滤波器的训练样本
Fig. 3. Comparison of training samples between traditional correlation filters and proposed method. (a) Cyclic-shift training samples of traditional correlation filter; (b) training samples of foreground-aware correlation filter
下载图片 查看原文
图 4. 无重检测器的carRace和ball序列的IoU值和响应得分曲线关系。(a) carRace的IoU值和响应得分曲线关系;(b) carRace第502帧跟踪结果;(c) carRace第510帧跟踪结果;(d) ball的IoU值和响应得分曲线关系;(e) ball第209帧跟踪结果;(f) ball第211帧跟踪结果
Fig. 4. Relationship between IoU value and tracking confidence score for carRace and ball sequences without re-detector. (a) Relationship between IoU value of carRace and tracking confidence score; (b) 502nd-frame tracking result of carRace; (c) 510th-frame tracking result of carRace; (d) relationship between IoU of ball and tracking confidence score; (e) 209th-frame tracking result of ball; (f) 211st-frame tracking result of ball
下载图片 查看原文
图 5. 基于传统特征的跟踪器在OTB-2013数据集上的OPE曲线和成功率曲线。(a) OPE曲线;(b)成功率曲线
Fig. 5. Plots of OPE and success rate of trackers with traditional features on OTB-2013 dataset. (a) Plots of OPE; (b) plots of success rate
下载图片 查看原文
图 6. 基于卷积特征的跟踪器在OTB-2013数据集上的OPE曲线和成功率曲线。(a) OPE曲线;(b)成功率曲线
Fig. 6. Plots of OPE and success rate of trackers with convolutional features on OTB-2013 dataset. (a) Plots of OPE; (b) plots of success rate
下载图片 查看原文
图 7. 本文算法和SiamFC,CCOT,DSST,KCF,ECO,CF2在OTB-2015上的8个序列的效果对比。从上到下依次为singer2,girl2,tiger,bird1,dragonbaby,motorrolling,skiing,soccer
Fig. 7. Comparison of tracking results of SiamFC, CCOT, DSST, KCF, ECO, CF2, and proposed algorithm on 8 challenging sequences from OTB-2015 dataset. From top to bottom: singer2, girl2, tiger, bird1, dragonbaby, motorrolling, skiing, and soccer
下载图片 查看原文
表 1基于传统特征的跟踪算法在OTB-2013上的成功率、精确度和跟踪速度
Table1. Success rate, precision, and tracking speed of tracking algorithm based on traditional features on OTB-2013 dataset
| Parameter | Ours | ECO-HC | LCT | SRDCF | Staple-CA | Staple | BACF | DSST | KCF |
|---|
| Mean OP /% | 85.5 | 81.0 | 81.3 | 78.1 | 77.6 | 75.4 | 85.4 | 67.0 | 62.3 | | Mean DP /% | 89.2 | 87.4 | 84.8 | 83.8 | 83.3 | 79.3 | 78.5 | 74.0 | 74.0 | | Tracking speed /(frame·s-1) | 25.3 | 42 | 18.5 | 5.8 | 35.3 | 76.6 | 23.2 | 20.4 | 171.8 |
|
查看原文
表 2各跟踪器在OTB-2013上的属性评估
Table2. Performance evaluation of each tracker on OTB-2013 dataset
| Algorithm | SV | OV | OR | OCC | DEF | MB | FM | IR | BC | LR | IV |
|---|
| ECO-HC | 0.627 | 0.694 | 0.668 | 0.67 | 0.645 | 0.610 | 0.607 | 0.589 | 0.606 | 0.672 | 0.612 | | Ours | 0.654 | 0.667 | 0.632 | 0.669 | 0.664 | 0.605 | 0.612 | 0.637 | 0.625 | 0.544 | 0.626 | | LCT | 0.553 | 0.594 | 0.624 | 0.627 | 0.668 | 0.524 | 0.534 | 0.592 | 0.587 | 0.541 | 0.588 | | SRDCF | 0.587 | 0.555 | 0.599 | 0.627 | 0.635 | 0.601 | 0.569 | 0.566 | 0.587 | 0.541 | 0.576 | | SAMF | 0.507 | 0.555 | 0.559 | 0.612 | 0.625 | 0.461 | 0.483 | 0.525 | 0.520 | 0.526 | 0.513 | | Staple-CA | 0.574 | 0.562 | 0.594 | 0.600 | 0.632 | 0.569 | 0.566 | 0.601 | 0.587 | 0.497 | 0.596 | | Staple | 0.551 | 0.547 | 0.575 | 0.593 | 0.618 | 0.541 | 0.508 | 0.580 | 0.576 | 0.496 | 0.568 | | KCF | 0.427 | 0.550 | 0.495 | 0.514 | 0.534 | 0.497 | 0.459 | 0.497 | 0.535 | 0.537 | 0.493 | | DSST | 0.546 | 0.462 | 0.536 | 0.532 | 0.506 | 0.455 | 0.428 | 0.563 | 0.517 | 0.345 | 0.561 |
|
查看原文
表 3基于卷积特征的跟踪算法在OTB-2013上的准确率、精确度和跟踪速度
Table3. Success rate, precision, and tracking speed of tracking algorithm based on convolutional features on OTB-2013 dataset
| Parameter | Ours | ECO | MDNet | CCOT | DeepSRDCF | SiamFC | CFNet | CF2 |
|---|
| Mean OP /% | 89.4 | 88.7 | 91.1 | 83.2 | 79.5 | 79.1 | 76.9 | 74.0 | | Mean DP /% | 90.0 | 93.0 | 94.8 | 89.9 | 84.9 | 81.5 | 80.7 | 89.1 | | Tracking speed /(frame·s-1) | 10.6 | 9.8 | 0.8 | 0.8 | 0.2 | 83.7 | 78.4 | 10.2 |
|
查看原文
表 4VOT2016数据集上各算法的EAO,精确度和稳健性评估
Table4. Evaluations of EAO, precision, and robustness of algorithms on VOT2016 dataset
| Algorithm | EAO | Accuracy | Robustness |
|---|
| DSST | 0.181 | 0.500 | 2.720 | | ECO | 0.375 | 0.530 | 0.730 | | Staple | 0.295 | 0.540 | 1.350 | | MDNet | 0.257 | 0.530 | 1.200 | | BACF | 0.223 | 0.560 | 1.880 | | SRDCF | 0.247 | 0.520 | 1.500 | | ECO-HC | 0.322 | 0.510 | 1.080 | | DeepSRDCF | 0.276 | 0.510 | 1.170 | | CCOT | 0.331 | 0.530 | 0.238 | | SiamFC | 0.277 | 0.549 | 0.382 | | Ours | 0.320 | 0.535 | 0.926 | | Oursdeep | 0.285 | 0.555 | 1.330 |
|
查看原文
虞跃洋, 史泽林, 刘云鹏. 基于前景感知的时空相关滤波跟踪算法[J]. 激光与光电子学进展, 2019, 56(22): 221503. Yueyang Yu, Zelin Shi, Yunpeng Liu. Foreground-Aware Based Spatiotemporal Correlation Filter Tracking Algorithm[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221503.









 PDF全文
PDF全文

