光学学报, 2019, 39 (6): 0601003, 网络出版: 2019-06-17
基于相关计算的激光雷达二维风场探测  下载: 997次
下载: 997次
Two-Dimensional Wind Field Measurement Based on Lidar Signal Correlation
图 & 表
图 1. 基于激光雷达回波相关性的测风原理示意图。(a)激光雷达探测气溶胶不均匀结构;(b)距离激光雷达1 L1处和距离激光雷达2 L2处的信号曲线
Fig. 1. Schematic of wind measurement based on lidar echo correlation. (a) Measurement of aerosol inhomogeneity by lidar; (b) signal curves of lidar 1 at distance of L1 and lidar 2 at distance of L2
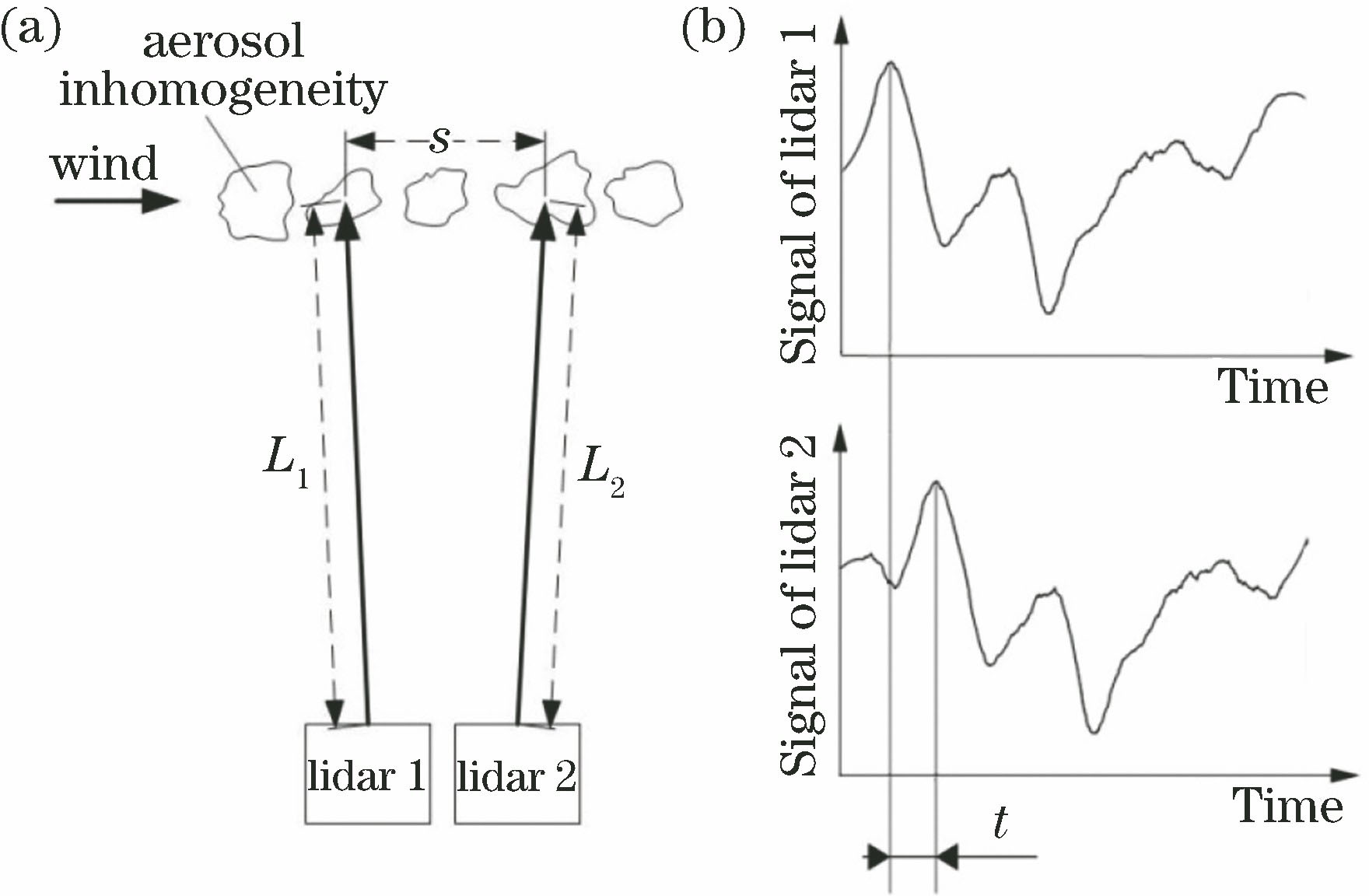

图 3. 三光束二维风场反演方法原理。(a)三台激光雷达位置及角度;(b)风速风向反演示意图
Fig. 3. Principle of three-beam two-dimensional wind field inversion method. (a) Position and angle of three lidars; (b) schematic of wind velocity and direction inversion

图 4. 相关二维测风激光雷达系统。 (a)结构图;(b)实物图
Fig. 4. Correlation-based two-dimensional wind measurement lidar system. (a) Structural diagram; (b) physical map

图 5. 相关二维测风激光雷达系统实验位置与风塔位置
Fig. 5. Positions of correlation-based two-dimensional wind measurement lidar system and wind tower

图 6. 3台激光雷达在450 m距离处的信号起伏曲线及时空演变图。(a)激光雷达1的信号起伏曲线;(b)激光雷达2的信号起伏曲线;(c)激光雷达3的信号起伏曲线;(d)激光雷达1的信号时空演变图;(e)激光雷达2的信号时空演变图;(f)激光雷达3的信号时空演变图
Fig. 6. Signal curves at distance of 450 m and signal temporal variations for three lidars. (a) Signal curve of lidar 1; (b) signal curve of lidar 2; (c) signal curve of lidar 3; (d) signal temporal variation of lidar 1; (e) signal temporal variation of lidar 2; (f) signal temporal variation of lidar 3

图 7. 激光雷达2在不同距离处的信号起伏曲线。(a) 150 m; (b) 300 m; (c) 450 m; (d) 600 m; (e) 750 m; (f) 900 m; (g) 1050 m; (h) 1200 m; (i) 1350 m
Fig. 7. Signal curves of lidar 2 at different distances. (a) 150 m; (b) 300 m; (c) 450 m; (d) 600 m; (e) 750 m; (f) 900 m; (g) 1050 m; (h) 1200 m; (i) 1350 m

图 8. 相关二维测风激光雷达系统中激光雷达间不同夹角下的风速及风向探测结果。 (a)风速;(b)风向
Fig. 8. Measurement results of wind speed and direction by correlation-based two-dimensional wind measurement lidar system under different lidar angles. (a) Wind speed; (b) wind direction

图 9. 不同时间序列长度时的相关曲线。(a) 500 s; (b) 300 s; (c) 200 s; (d) 100 s; (e) 50 s; (f) 20 s
Fig. 9. Correlation curves for different lengths of time sequences. (a) 500 s; (b) 300 s; (c) 200 s; (d) 100 s; (e) 50 s; (f) 20 s

图 10. 相关二维测风激光雷达系统探测的单个时刻风速和风向曲线。(a)风速;(b)风向
Fig. 10. Curves of wind speed and direction measured by correlation-based two-dimensional wind measurement lidar system at specific time. (a) Wind speed; (b) wind direction

图 11. 相关二维测风激光雷达系统在450 m距离处探测得到的2700 s夜间、白天的风速和风向曲线。 (a)夜间风速;(b)夜间风向;(c)白天风速;(d)白天风向
Fig. 11. Curves of 2700 s wind speed and direction at night and in daytime measured by correlation-based two-dimensional wind lidar measurement system at distance of 450 m. (a) Wind speed at night; (b) wind direction at night; (c) wind speed in daytime; (d) wind direction in daytime

表 1激光雷达主要参数
Table1. Main parameters of lidar
|
张战盈, 蔡熠, 余东升, 陈海燕, 方蔚恺, 杨喆, 徐青山, 储焰南, 徐赤东. 基于相关计算的激光雷达二维风场探测[J]. 光学学报, 2019, 39(6): 0601003. Zhanying Zhang, Yi Cai, Dongsheng Yu, Haiyan Chen, Weikai Fang, Zhe Yang, Qingshan Xu, Yannan Chu, Chidong Xu. Two-Dimensional Wind Field Measurement Based on Lidar Signal Correlation[J]. Acta Optica Sinica, 2019, 39(6): 0601003.




 PDF全文
PDF全文

