基于深度卷积神经网络的道路场景深度估计  下载: 1683次
下载: 1683次
Road Scene Depth Estimation Based on Deep Convolutional Neural Networks
1 浙江科技学院信息与电子工程学院, 浙江 杭州 310023
2 浙江大学信息与电子工程学院, 浙江 杭州 310027
图 & 表
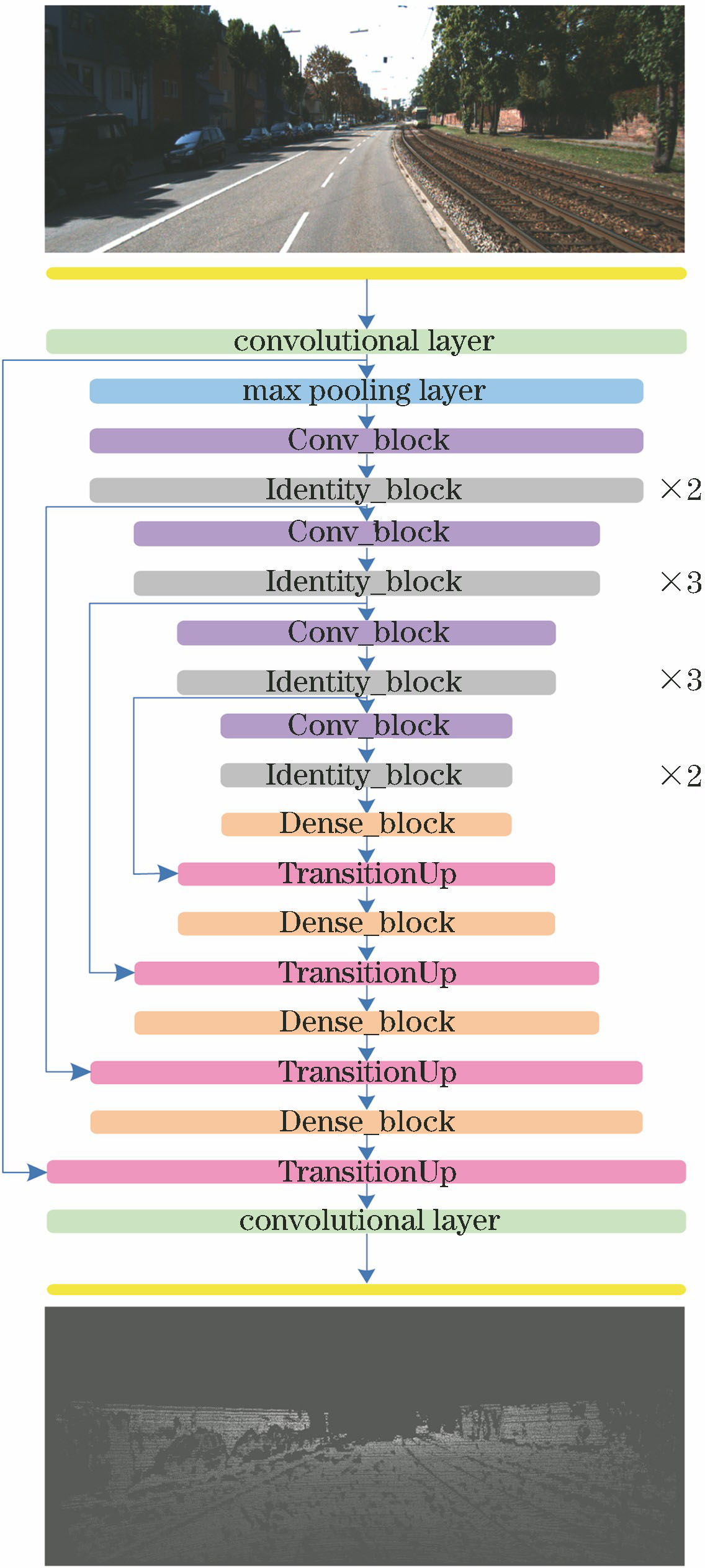
图 1. 神经网络结构图
Fig. 1. Structural diagram of neural network
下载图片 查看原文
图 2. 两种类型的网络块。(a) Identity_block;(b) Conv_block
Fig. 2. Two types of network blocks. (a) Identity_block; (b) Conv_block
下载图片 查看原文
图 3. N层Dense_block图
Fig. 3. Schematic of N-layer Dense_block
下载图片 查看原文
图 4. TransitionUp图
Fig. 4. Schematic of TransitionUp
下载图片 查看原文
图 5. 实验结果。(a) RGB图像;(b)地面实况;(c)深度预测图
Fig. 5. Experimental results. (a) RGB image; (b) ground truth; (c) depth prediction map
下载图片 查看原文
表 1KITTI数据集的深度估计结果
Table1. Depth estimation results on KITTI dataset
| Method | Accuracy (higher is better) | Error (lower is better) | |
|---|
| δ<1.25 | | δ<1.252 | δ<1.253 | Rrms | Rlog_rms | Elg |
|---|
| Ref. [24] | 0.488 | 0.947 | 0.972 | 2.6440 | 0.272 | 0.167 | | Ref. [41] | 0.674 | 0.943 | 0.972 | 2.4618 | 0.243 | 0.126 | | Ref. [42] | 0.640 | 0.947 | 0.979 | 2.5193 | 0.247 | 0.134 | | Ref. [43] | 0.634 | 0.916 | 0.945 | 2.8246 | 0.305 | 0.127 | | Ref. [44] | 0.566 | 0.945 | 0.970 | 2.6507 | 0.264 | 0.145 | | Proposed | 0.717 | 0.947 | 0.974 | 2.4225 | 0.234 | 0.111 |
|
查看原文
表 2切片实验深度估计结果
Table2. Depth estimation results of slice experiment
| Method | Accuracy (higher is better) | Error (lower is better) | |
|---|
| δ<1.25 | | δ<1.252 | δ<1.253 | Rrms | Rlog_rms | Elg |
|---|
| Proposed | 0.717 | 0.947 | 0.974 | 2.4225 | 0.234 | 0.111 | | Proposed1 | 0.696 | 0.941 | 0.971 | 2.3877 | 0.242 | 0.124 | | Proposed2 | 0.678 | 0.946 | 0.974 | 2.412 | 0.237 | 0.122 |
|
查看原文
袁建中, 周武杰, 潘婷, 顾鹏笠. 基于深度卷积神经网络的道路场景深度估计[J]. 激光与光电子学进展, 2019, 56(8): 081501. Jianzhong Yuan, Wujie Zhou, Ting Pan, Pengli Gu. Road Scene Depth Estimation Based on Deep Convolutional Neural Networks[J]. Laser & Optoelectronics Progress, 2019, 56(8): 081501.








 PDF全文
PDF全文

