基于分层墨卡托投影的激光雷达点云数据局部特征描述  下载: 885次
下载: 885次
Local Feature Description of LiDAR Point Cloud Data Based on Hierarchical Mercator Projection
1 中国人民解放军国防科技大学电子科学学院, 湖南 长沙 410073
2 中国人民解放军国防科技大学气象海洋学院, 湖南 长沙 410073
图 & 表
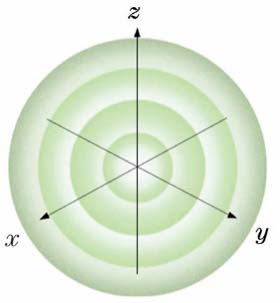
图 1. 分层墨卡托投影示意图
Fig. 1. Schematic diagram of hierarchical Mercator projection
下载图片 查看原文
图 2. 分层墨卡托投影的平面(5层)
Fig. 2. Plane of hierarchical Mercator projection (5 layers)
下载图片 查看原文
图 3. 分层墨卡托投影的流程图(3层)
Fig. 3. Flow chart of hierarchical Mercator projection (3 layers)
下载图片 查看原文
图 4. 墨卡托投影层数对算法识别性能的影响(Bologna数据集)
Fig. 4. Influence of the number of Mercator projection layers on the recognition performance of the algorithm (Bologna dataset)
下载图片 查看原文
图 5. 墨卡托投影层数对算法识别性能的影响(3DMatch数据集)
Fig. 5. Influence of the number of Mercator projection layers on the recognition performance of the algorithm (3DMatch dataset)
下载图片 查看原文
图 6. 不同特征提取算法的PRC。(a)噪声方差为0.3倍点云分辨率;(b) 噪声方差为0.5倍点云分辨率;(c) 噪声方差为0.8倍点云分辨率;(d) 噪声方差为1.5倍点云分辨率
Fig. 6. PRC of different feature extraction algorithms. (a) Noise variance is 0.3 times point cloud resolution; (b) noise variance is 0.5 times point cloud resolution; (c) noise variance is 0.8 times point cloud resolution; (d) noise variance is 1.5 times point cloud resolution rate
下载图片 查看原文
表 1分层墨卡托特征提取的运算时间和平均精度(Bologna数据集)
Table1. Runtime and average precision of hierarchical Mercator projection (Bologna dataset)
| Number of layers | Runtime /s | Average accuracy /% |
|---|
| 1 | 1034.8359 | 0.0381 | | 3 | 758.0363 | 0.3251 | | 5 | 690.6250 | 0.5222 | | 10 | 598.6700 | 0.7456 | | 20 | 602.9223 | 0.8804 | | 30 | 835.4665 | 0.8767 | | 50 | 1278.1252 | 0.7408 | | 100 | 13052.3727 | 0.6823 |
|
查看原文
表 2分层墨卡托特征提取的运算时间和平均精度(3DMatch数据集)
Table2. Runtime and average precision of hierarchical Mercator projection (3DMatch dataset)
| Number of layers | Runtime /s | Average accuracy /% |
|---|
| 1 | 4732.5692 | 0.0433 | | 3 | 3069.1723 | 0.1214 | | 5 | 1135.2417 | 0.3044 | | 10 | 625.3645 | 0.5471 | | 20 | 858.3694 | 0.7182 | | 30 | 25685.2360 | 0.5958 |
|
查看原文
表 3不同特征提取算法的平均精度和运算时间
Table3. Average accuracy and operation time of different feature extraction algorithms
| Algorithm | Run- time /s | Average accuracy in different noise /% |
|---|
| 0.3 | 0.5 | 0.8 | 1.5 |
|---|
| TriS | 655.6498 | 0.979 | 0.885 | 0.600 | 0.803 | | Sgh1 | 1100.8573 | 0.986 | 0.974 | 0.777 | 0.142 | | RoPS | 1593.7144 | 1.000 | 0.996 | 0.999 | 0.994 | | SHOT | 854.8046 | 0.997 | 0.994 | 0.962 | 0.006 | | MaSH | 219.6354 | 0.999 | 0.828 | 0.151 | 0.027 | | SDASS | 122.6109 | 1.000 | 0.940 | 0.165 | 0.035 | | Toldi | 25.0574 | 0.994 | 0.983 | 0.363 | 0.803 | | LFSH | 308.2209 | 0.881 | 0.507 | 0.120 | 0.029 | | DLFS | 913.4914 | 0.856 | 0.690 | 0.575 | 0.077 | | HMec-20 | 557.4517 | 1.000 | 1.000 | 1.000 | 0.995 |
|
查看原文
顾尚泰, 王玲, 马燕新, 马超. 基于分层墨卡托投影的激光雷达点云数据局部特征描述[J]. 光学学报, 2020, 40(20): 2015001. Shangtai Gu, ling Wang, Yanxin Ma, Chao Ma. Local Feature Description of LiDAR Point Cloud Data Based on Hierarchical Mercator Projection[J]. Acta Optica Sinica, 2020, 40(20): 2015001.








 PDF全文
PDF全文

