中国激光, 2018, 45 (7): 0710004, 网络出版: 2018-09-11
利用密集匹配点云的建筑单体提取算法研究  下载: 822次
下载: 822次
Single Part of Building Extraction from Dense Matching Point Cloud
图 & 表
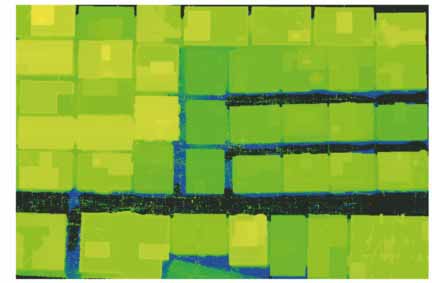
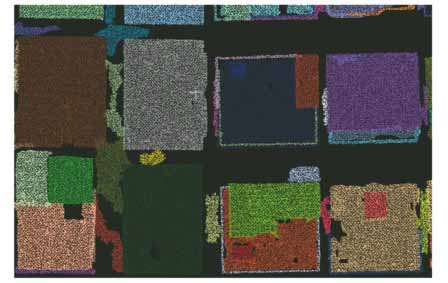
图 4. 典型的非屋顶面点云。(a)高程渲染下的原始点云;(b)包含女儿墙点云面域及重叠面域部分的点云面域;(c)滤除女儿墙点云面域及重叠面域后的点云面域
Fig. 4. Classic non-roof point cloud. (a) Original point cloud using height rendering; (b) point cloud clusters containing parapet wall and overlapping clusters; (c) point cloud clusters after removing parapet wall and overlapping clusters
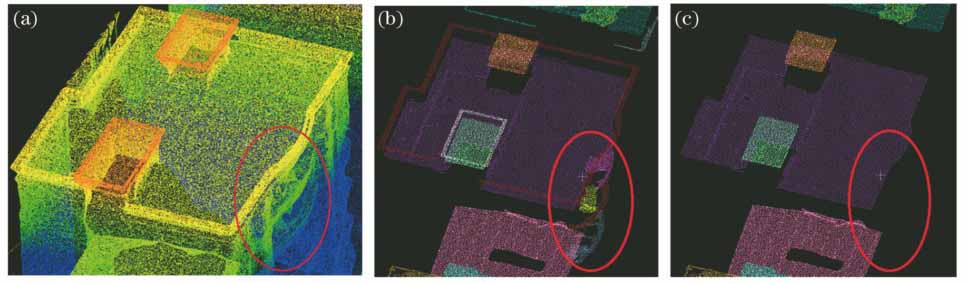
图 5. 典型的非屋顶面点云。(a)高程渲染下的原始点云;(b)包含支柱支撑建筑结构的点云面域;(c)滤除支柱支撑建筑结构后的点云面域
Fig. 5. Classic non-roof point cloud.(a) Original point cloud using height rendering; (b) point cloud clusters containing structure supported by pillar; (c) point cloud clusters after removing structure supported by pillar

图 6. 建筑区域的原始点云。(a)区域A;(b)区域B
Fig. 6. Original point cloud in construction area. (a) Region A; (b) region B
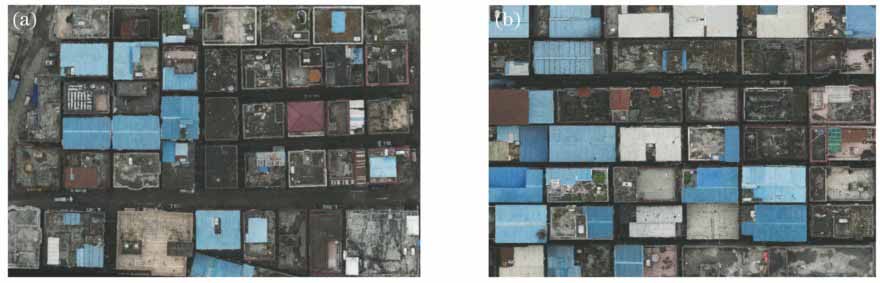
图 7. (a)聚类得到的水平点云面域;(b) D=0.5 m及hv=0.25 m时剔除建筑错误连接点云面域的结果;(c) D=0.25 m及 hv=0.25 m时剔除建筑错误连接点云面域的结果;(d) D=0.25 m及hv=0.1 m时剔除建筑错误连接点 云面域的结果;(e) D=0.25 m及hv=0.5 m时剔除建筑错误连接点云面域的结果;(f)滤除其他非屋顶面的结果
Fig. 7. (a) Horizontal point cloud clusters using clustering; (b) result of removing error point cloud clusters of building when D is 0.5 m and hv is 0.25 m; (c) result of removing error point cloud clusters of building when D is 0.25 m and hv is 0.25 m; (d) result of removing error point cloud clusters of building when D is 0.25 m and hv is 0.1 m; (e) result of removing error point cloud clusters of building when D is 0.25 m and hv is 0.5 m; (f) result of filtering other non-roof point cloud clusters

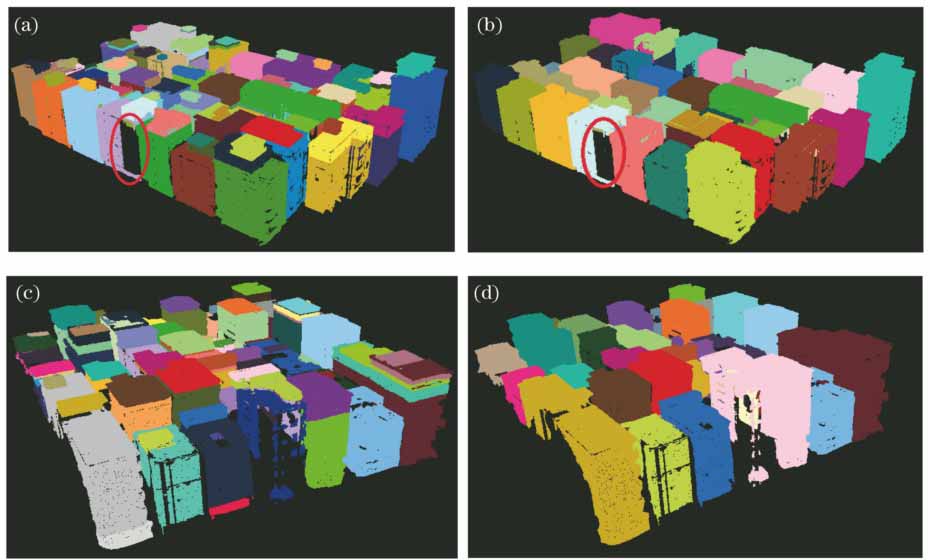
表 1建筑单体的提取结果
Table1. Extraction result of single part of building
|
表 2建筑单体提取精度的评价
Table2. Precision evaluation of extraction for single part of building
|
闫利, 魏峰. 利用密集匹配点云的建筑单体提取算法研究[J]. 中国激光, 2018, 45(7): 0710004. Li Yan, Feng Wei. Single Part of Building Extraction from Dense Matching Point Cloud[J]. Chinese Journal of Lasers, 2018, 45(7): 0710004.



 PDF全文
PDF全文

