1 国防科技大学空天科学学院,湖南 长沙 410072
2 酒泉卫星发射中心,甘肃 酒泉 735000
基于多项式拟合的标定方法可在缺乏相机曝光时间的条件下,获取相机响应函数(CRF)曲线和图像曝光比,具备广泛的适用性。然而该方法存在迭代发散和标定精度不高问题,影响其实际应用。本文通过分析传统多项式拟合标定方法流程,发现在全局误差函数条件下,标定数据集合中存在大量无效项,既减少了有效标定数据,又降低了图像曝光比迭代计算精度。针对这一问题,提出了一种改进的联合局部误差函数标定方法,可在两幅曝光相近的图像间选取标定数据,避免引入无效项,使得计算多项式系数和曝光比的数据一致。在公开数据集和某工业相机拍摄数据集上的标定结果表明,改进方法具有较好的收敛性,相比于传统方法,颜色三通道CRF曲线分布更加紧凑,通道间曝光比平均偏差分别减少了49.83%和42.25%。
成像系统 相机响应函数 多曝光图像 拟合多项式
1 深圳市智能光测与感知重点实验室,广东 深圳 518060
2 深圳大学物理与光电工程学院,广东 深圳 518060
3 国防科技大学空天科学学院,湖南 长沙 410073
4 图像测量与视觉导航湖南省重点实验室,湖南 长沙 410073
5 深圳市鹰眼在线电子科技有限公司,广东 深圳 518114
变形测量是大型工程建设与运维的基础性、常规性任务,是实验力学、结构健康监测学科最重要的内容之一,现有测量方法难以精准高效经济地实现大型工程结构大尺度高精度测量需求,迫切需要建立新的测量方法和技术。近年来,以摄像机/照相机为传感器的摄像测量理论手段具有非接触性、精度高、成本低等优势,被逐步应用于各种工程结构测量中。本文结合本团队的相机网络测量方法与系统,综述了单相机、多相机摄像测量系统,介绍了多相机系统的图像采集、相机标定、特征提取与跟踪、变形计算等关键算法,论述了摄像测量技术在长期监测和快速检测领域的相关应用,以及系统稳定性的主要影响因素,最后对大型工程结构静动态变形摄像测量方法与技术的成果和问题进行了总结,并展望了其未来发展趋势。
大型结构 变形 静动态 摄像测量 多相机系统 激光与光电子学进展
2024, 61(1): 0112001
1 国防科技大学空天科学学院,湖南 长沙 410000
2 图像测量与视觉导航湖南省重点实验室,湖南 长沙 410000
旋转目标检测是遥感图像解译的重要任务之一,存在目标方向任意、小目标密集排列、目标表示引起的角度周期性等典型问题。针对上述问题,提出一种基于DEtection Transformer(DETR)目标检测器和改进去噪训练的旋转目标检测方法,即arbitrary-oriented object detection Transformer with improved deNoising anchor boxes(AO2DINO)。首先,该方法引入一种多尺度旋转可变形注意力模块,将角度信息以旋转矩阵的形式引入注意力权重的计算,提高了模型对旋转目标的适应能力。其次,针对小目标密集排列问题,提出一种自适应的样本分配器,引入旋转交并比和自适应阈值,实现对密集目标更加精确的采样,提升了模型对小目标的检测能力。最后,在模型中引入基于卡尔曼滤波的交并比(KFIoU)作为回归损失,以解决旋转目标表示引起的角度周期性问题。AO2DINO在DOTAv1.0和DIOR-R两个公开数据集上与典型的旋转目标检测方法进行了比较,在DETR系列旋转目标检测方法中检测精度最高,且训练时收敛速度更快,在训练12个epochs时就几乎达到了其他旋转目标检测方法训练36个epochs时的检测效果。
旋转目标检测 DETR目标检测器 多尺度旋转可变形注意力 激光与光电子学进展
2024, 61(2): 0211023
Author Affiliations
Abstract
1 Institute of Intelligent Optical Measurement and Detection, Shenzhen University, Shenzhen 518060, China
2 College of Physics and Optoelectronic Engineering, Shenzhen University, Shenzhen 518060, China
3 Shenzhen Sincevision Technology Co., Ltd., Shenzhen 518055, China
4 National Key Laboratory of Human Factors Engineering, China Astronaut Research and Training Center, Beijing 100094, China
5 College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
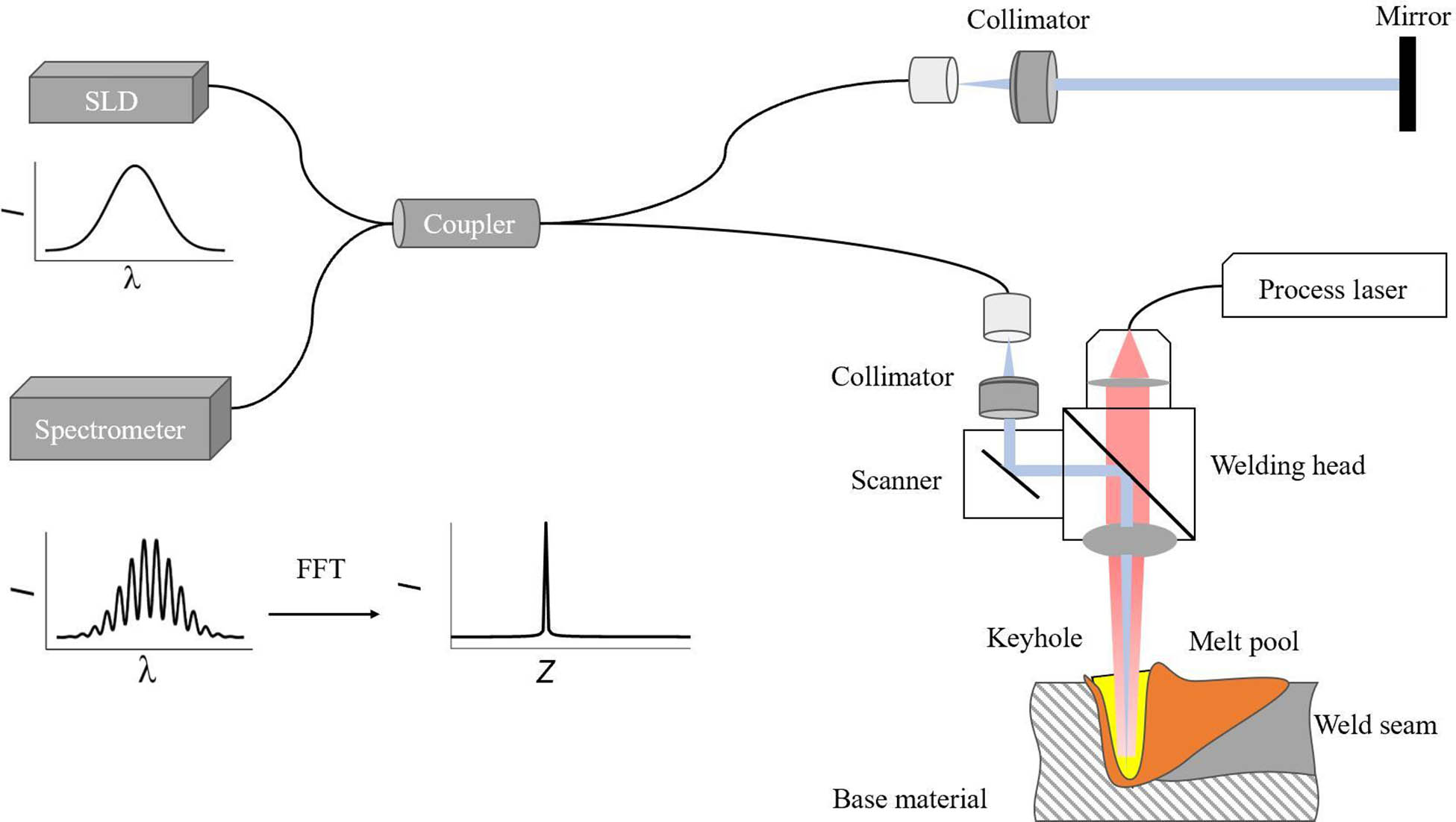
Optical coherence tomography (OCT) allows a direct and precise measurement of laser welding depth by coaxially measuring the keyhole depth and can be used for process monitoring and control. When OCT measurement was taken during single-beam laser welding, the keyhole instability of aluminum welding resulted in highly scattered OCT data and complicated the welding depth extraction methods. As a combination of an inner core beam and an outer ring beam, a novel adjustable ring mode (ARM) laser for producing a stable keyhole was applied to the OCT measurement. Different ARM laser power arrangements were conducted on aluminum and copper. The results indicated that the ring beam greatly improved the stability of the core beam-induced keyhole, and smooth welding depth can be extracted from the concentrated OCT data.
optical coherence tomography adjustable ring mode laser laser welding welding depth Chinese Optics Letters
2024, 22(1): 011203
1 深圳大学智能光测研究院,广东 深圳 518000
2 深圳大学物理与光电工程学院,广东 深圳 518000
位移监测是结构健康监测最基础、最常规的任务之一。针对桥梁、隧道等长大线状结构形变监测,基于相机组网的位移传递测量是有效手段,但随着相机测站数量的增加,提点误差、模型简化等因素会导致相机网络的误差传递与累积,从而使得测量方程的病态程度增加,如何有效地抑制相机网络误差累积效应是该方法的关键问题之一。为此,本文对相机组网测量误差传递机理进行了系统分析,并提出一种基于误差系数的位移传递测量误差抑制方法,通过误差系数可以对网络测量误差直接进行表征。根据所构建的理论模型,优先在控制点处布置相机测站,尽可能在相机测站处增加标志点,并尽可能在相机测站间多布设标志点,以优化相机网络构型、提高测量精度,并在大跨度斜拉桥上对误差抑制方法进行了现场验证。结果表明,通过优化网络构型,相机网络的传递误差最高可被抑制79.19%。该研究可为相机组网测量在实际工程特别是长大线状结构形变测量中的应用提供有效的累积误差抑制和网络构型优化手段。
相机组网 线状结构 形变监测 位移传递误差 构型优化 光学学报
2023, 43(21): 2112002
1 国防科技大学空天科学学院,湖南 长沙 410073
2 图像测量与视觉导航湖南省重点实验室,湖南 长沙 410073
运动相机相对位姿估计是基于机载光电平台进行视觉定位的关键技术。在大倾角、小交会角等典型受限观测条件下,相机位姿估计精度易受姿态角误差和像点提取误差的影响,使目标定位精度难以满足应用需求。针对惯性测量单元测量角度随时间发生漂移,且惯性测量单元与相机安装关系标定繁琐的问题,提出了一种惯性测量单元与相机固联安装下的对地定位方法,无需标定相机和惯性测量单元之间的安装关系。首先,利用固联安装的惯性测量单元为运动相机提供相对旋转角信息;然后,根据1个相对旋转角和4个同名点估计运动相机的相对位姿;最后,采用投影矩阵交会法线-线交会出目标的空间位置。仿真和飞行实验表明,在典型受限观测条件下,所提方法定位精度优于传统定位方法,具有高精度、高效率、强鲁棒性等优点。
测量 机载光电平台 惯性测量单元 受限观测条件 位姿估计 对地定位 中国激光
2023, 50(14): 1404005
1 国防科技大学空天科学学院,湖南 长沙 410073
2 图像测量与视觉导航湖南省重点实验室,湖南 长沙 410073
高精度的目标实时定位对于无人机侦察和指引目标至关重要。但在大倾角、小交会角等受限观测条件下,机载光电平台对地定位精度难以满足任务需求。为提高受限观测条件下机载光电平台对地定位的精度,提出了一种基于观测平台位置和对目标激光测距的对地定位全局最优化方法。首先,根据地面固定目标的连续观测数据建立加权误差方程,再将非线性问题转换为特征向量求解问题,无需迭代优化即可求出全局最优解。然后,通过蒙特卡罗仿真分析定位方法受误差源的影响,并通过多次飞行实验验证了该定位方法的有效性。实验结果表明,在受限观测条件下,所提方法对地定位误差低于30 m,运算耗时不超过10 ms。本文方法具有定位精度高、计算效率高等优点,以及较高的工程应用价值。
目标定位 受限观测 全局最优解 激光测距 机载光电平台 光学学报
2023, 43(12): 1212003
1 西安卫星测控中心宇航动力学国家重点实验室,陕西 西安 710043
2 国防科技大学空天科学学院,湖南 长沙 410073
鉴于透视投影模型在长焦相机标定过程中存在过参数化的问题,采用仿射近似投影模型对长焦相机成像过程进行建模,并提出了基于仿射近似投影模型的长焦相机标定方法。首先,深入分析了仿射投影位姿模糊的形成机制,在此基础上详细推导了仿射近似投影下基于平面模板的长焦相机内外参数解算方法;然后,基于透视投影模型,以重投影像点残差平方和最小为目标函数,对内外参数初值进行优化求精;最后,针对仿射投影模型的位姿模糊,在平面标定模板基础上附加微凸圆柱标志。仿真和实际实验结果显示,所提出的长焦相机标定方法有效可行,在实验室环境下重建平面目标的离面中误差优于0.02 mm。
测量 长焦相机 相机标定 仿射近似投影 位姿模糊
1 深圳大学智能光测研究院,广东 深圳 518000
2 深圳大学物理与光电工程学院,广东 深圳 518000
由于缺少可参考的散斑图案,单目激光散斑投影系统需要借助精密的测距仪器,提前拍摄不同标准距离处的散斑图像,测量效率较低,且无法在线校正系统的光轴偏移。针对上述问题,提出一种基于单目激光散斑投影系统的外参数标定方法,可将单目激光散斑投影系统等效于带有散斑图像的双目立体视觉系统。通过调整标定板的位姿,计算同名散斑点的空间三维坐标,解算红外相机与激光散斑投射器之间的位姿关系,并对其进行迭代优化,生成投射器的虚拟散斑图像。实验结果表明,所提方法的位移测量误差低于0.16 mm,标准球的半径测量误差低于0.13 mm,且在一定的深度范围内,深度重建结果明显优于Astra-Pro的探测结果。所提方法可有效提高单目激光散斑投影系统的标定效率和深度重建精度。
机器视觉 单目激光散斑投影系统 外参数标定 迭代优化
机器视觉是研究如何让机器看见和理解目标场景,并快速作出决定的一种科学与技术。一个典型的机器视觉系统一般包含图像获取、数据传输、处理分析、决策及执行4个部分,具有“感-传-知-用”的系统特征。在成像技术、处理算法、算力平台和行业应用4个核心要素的驱动下,机器视觉目前已广泛应用于工业视觉、图像解释、物体识别、虚拟现实、生命科学、智能安防、自动驾驶、人机交互等领域。例如在智能制造领域,机器视觉可以实现对产品的轮廓几何参数三维测量和表面缺陷检测;对字符、条码等的读取,对产品的分类和分组;对机械手的视觉引导与伺服控制,使其准确地执行抓取、焊接、装配、码垛和拆垛等。给机器装上慧眼,实现机器智能化,用机器换人是智能制造领域的必然发展趋势。
激光与光电子学进展
2022, 59(14): 1400000









