1 中国科学院 长春光学精密机械与物理研究所 应用光学国家重点实验室, 吉林 长春130033
2 中国科学院大学, 北京 100049
3 航天材料及工艺研究所, 北京 100071
为实现对复合材料内部缺陷进行无损检测并对缺陷位置进行准确标记, 本文提出了红外热波检测投影标注方法。利用红外热像仪获得闪光灯脉冲激励下样品的红外图像序列, 并通过时间采样优化的脉冲相位算法进行处理, 增强缺陷的检测效果, 再通过自动阈值对缺陷位置进行提取并由投影仪将提取结果投射到样品表面。针对投影仪与热像仪视角差异等因素引起的图像畸变问题, 本文提出了一种可见-红外相机辅助标定方法, 通过辅助相机对投影仪进行标定, 建立投影仪与热像仪的空间坐标关系, 对缺陷提取结果进行畸变矫正, 提高缺陷标记的精确度。实验结果表明, 该缺陷检测及标记方法对不同大小缺陷的面积标记误差在10%以内,中心标记误差在3 mm以内, 可以对材料内部缺陷进行较为精确的标记。
无损检测 脉冲相位法 阈值分割 投影变换 投影仪标定 non-destructive testing pulse phase method threshold segmentation projection transformation projector calibration
1 中国科学院 长春光学精密机械与物理研究所, 应用光学国家重点实验室, 吉林 长春 130033
2 中国科学院大学, 北京 100049
3 东北电力大学 计算机学院,吉林 吉林 132012
4 吉林省农村经济信息中心, 吉林 长春 130033
针对支架等遮挡物对720°全景相机底部图像造成遮挡的问题, 本文提出了一种基于分步拍摄的消除底部支架遮挡方法。通过对侧面、顶部一次拍摄和对底部两次拍摄消除底部遮挡。在此基础上, 针对侧面、顶部、底部图像亮度不一致问题进行了优化。基于全局的匀色算法会导致不同区域的图像互相影响, 造成匀色结果的偏差, 提出了一种基于区域生长法图像分割的Wallis匀色算法。实验结果表明, 本文方法能够消除底部图像遮挡; 使用本文算法匀色, 图像颜色差异较使用基于全局算法减小59.3%。
全景相机 全景图像拼接 匀色算法 panoramic camera panoramic image stitching dodging algorithm
1 中国科学院长春光学精密机械与物理研究所,吉林 长春 130033
2 中国科学院大学,北京100049
3 中国第一汽车股份有限公司新能源开发院,吉林 长春 130011
为保证空间惯性传感器的正常在轨运行,在发射阶段需保证测试质量固定以避免与周围电容极板的接触碰撞;到达预定轨道后再重新捕获并以最小残余线速度将测试质量释放至精确位置,保持自由悬浮状态。测试质量的捕获定位对驱动器提出高精度的要求。本文针对在太空中捕获定位释放测试质量所用的压电直线驱动器进行了设计定制与性能测试。试验结果表明:该定制的压电驱动器最小步长小于1 nm,但步长稳定性误差较大;150 V工作电压条件最大驱动力达72 N;单步行进驱动力稳定;夹持测试质量过程中,驱动力稳定,稳定性偏差为0.16%。满足捕获、定位、释放机构的使用需求。
精密驱动 尺蠖运动 压电驱动器 驱动力 位移分辨率 precision actuation inchworm motion piezoelectric actuator driving force displacement resolution
1 中国科学院 长春光学精密机械与物理研究所, 吉林 长春130033
2 中国科学院大学, 北京100049
惯性传感器被广泛应用于地球重力场反演、等效原理验证等科学实验中, 用来测量空间非保守力作用引起的微小加速度扰动以实现航天器的无拖曳控制。目前国内外正在大力开展的空间引力波探测计划中, 惯性传感器作为核心测量载荷主要用于屏蔽外界噪声扰动, 并通过静电控制和微推进器的测量及补偿实现测试质量在空间敏感轴方向自由漂浮运动。本文以静电悬浮式惯性传感器电容结构为基础, 结合系统静电力驱动控制的工作原理, 并以实际的加工条件为依据, 对电极不对称性这一系统自身的误差来源展开分析, 通过对各种不对称情况的系统性能影响比较分析, 得到电极不对称性对于系统性能, 特别是量程损失的影响显著。在此基础上结合实际加工条件得出将加工线度尺寸误差控制在10 μm以内, 面积不对称性控制在1%~2%之间的基本要求, 以降低其对系统测量范围的限制, 进而提高科学目标。
惯性传感器 敏感结构 电极不对称 量程 inertial sensor sensitive structure electrode asymmetry measuring range
1 中国科学院 长春光学精密机械与物理研究所 应用光学国家重点实验室,吉林 长春 130033
2 中国科学院大学,北京 100049
本文提出自适应光学成像系统中哈特曼波前探测器电子倍增增益的自适应控制方法,以使哈特曼波前探测器保持较高的信噪比同时避免亮度过饱和。利用亮度接近哈特曼饱和值的光源作为被观测目标,探测到的光斑阵列中有一个最高亮度值Im,统计200帧~500帧中的Im,计算其相对统计帧数的均值I-m、Im相对I-m的均方差值σm; 设定理想最高亮度值I-ms比饱和亮度低3.0σm~3.2σm; 再将光斑的亮度最大值相对一帧阵列中的光斑数计算平均值记为Ia,实时监测Ia; 依据信号强度I与增益G的线性关系,事先测得哈特曼波前探测器的技术特征参数ka、km和理想最高亮度值I-ms,即可以由当前帧探测数据Ia和增益Ga计算得到所需调整的增益值Gms。
自适应控制 电子倍增增益 哈特曼波前探测器 电子倍增CCD adaptive control EM gain Hartmann wavefront sensor electron multiplying CCD
Author Affiliations
Abstract
1 State Key Laboratory of Applied Optics, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China
2 University of Chinese Academy of Sciences, Beijing 100049, China
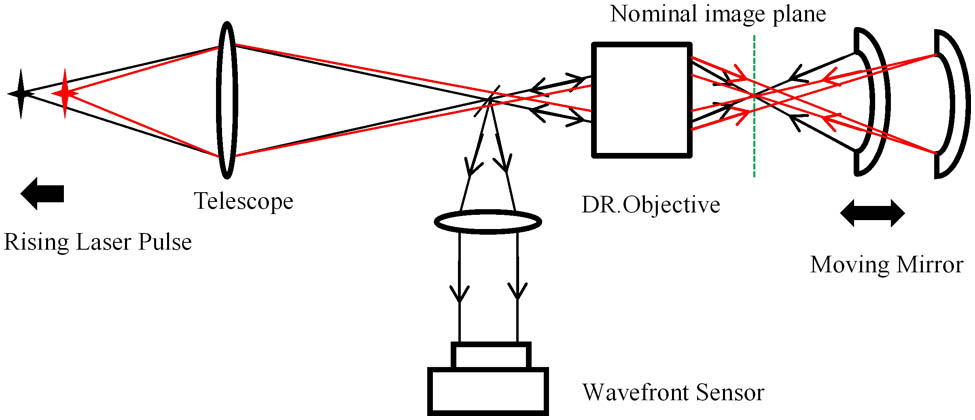
This Letter presents an optical design method based on the Seidel aberration theory for dynamic refocus systems. The function of a dynamic refocus system is to increase the amount of return photons when a pulsed laser travels over an extended height range. In this study, the dynamic refocus system is a short focal image system. The aberrations of the dynamic refocus system are calculated individually. Aplanatic lenses are used to eliminate the main spherical aberration. A field lens is used to change the stop position in order to eliminate comas and astigmatism. The effectiveness of the initial design results are confirmed, and the designed dynamic refocus objective with an aperture of F-number 0.98 and a focal length of 14.325 mm is achieved. The total motion of the dynamic refocus mirror is approximately 216 μm at heights that ranged from 8 to 18 km. The optimum result shows that the dynamic refocus system is an ideal optical image system at each conjugating height with 10 km sample thicknesses.
350.1260 Astronomical optics 010.7060 Turbulence 220.4830 Systems design Chinese Optics Letters
2016, 14(4): 042202
1 中国科学院 长春光学精密机械与物理研究所 应用光学国家重点实验室,吉林 长春130033
2 中国科学院大学,北京100049
3 长春中医药大学附属医院,吉林 长春130021
眼科临床上所使用的简易头托限定医生与受试者的距离不能超过一臂之长,因此无法用于较为庞大的眼底自适应成像系统。为了达到眼底自适应成像系统与受试者瞳孔快速对准、稳定定位的要求,设计了一种可长距离控制的二自由度的头托。采用具有自锁能力的梯形丝杠驱动头托垂直运动,采用传动效率高的滚珠丝杠驱动头托水平运动,以步进电机提供动力。基于PIC16F877单片机,完成了头托移动控制的软硬件设计,并在MPLAB与Proteus环境下进行了联合仿真实验。仿真结果表明,所设计的头托可在竖直方向和水平方向以20 μm的精准度定位,能够实现长距离、快速准确的瞳孔对准和左右瞳孔切换过程,是眼底自适应成像系统的良好辅助工具。
眼底自适应成像 头托 丝杠 PIC16单片机 步进电机驱动 adaptive optics retinal imaging head prop screw microcontroller stepper motor driver
1 中国科学院长春光学精密机械与物理研究所 应用光学国家重点实验室, 长春 130033
2 中国科学院大学, 北京 100039
基于等效应力法分析了温度变化对反射镜面形准确度的影响.对反射镜粘接处施加一定量的径向强迫位移约束, 使其受到与热应力大小一致的应力作用, 在该强迫位移约束下反射镜面形变化与热应力作用下反射镜面形变化基本一致.对直径为70 mm、厚度为15 mm的反射镜进行粘接实验, 用ZYGO干涉仪测定温变前后反射镜的面形变化.当温度由20℃降到16℃时, 反射镜面形峰谷值和均方根值的变化量分别为0.005λ和0.002λ(λ=632.8 nm), 理论计算的峰谷值和均方根值变化量分别为0.004λ和0.002λ;当温度由20℃升高到30℃时, 反射镜面形峰谷值和均方根值变化量分别为0.013λ和0.006λ, 理论计算的峰谷值和均方根值变化量分别为0.012λ和0.004λ, 实验值和模拟分析值基本一致.
光学检测 光学元件 面形分析 胶粘反射镜 温度变化 强迫位移约束 ZYGO干涉仪 Optical detection Optical element Surface analysis Bonded mirror Temperature change Forced displacement restrain ZYGO interferometer 光子学报
2015, 44(12): 1212001
1 中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033
2 中国科学院大学,北京 100039
设计了基于高精度直线驱动器和曲柄滑块机构的高精度二维角度调节机构,以实现2 m口径望远镜中哈特曼探测器与自适应光学系统间的高精度对准与自动化调节。依据光学设计分析得出调节机构分别需满足±1°的调节范围和6"的调节精度。根据哈特曼探测器的外形结构和调节机构的整体布局,选择了调节机构中的主要参数,对整体调节机构进行了初始设计并分析了它的精度和动态特性。利用自准直仪设计了调节机构的检测系统,对设计的调节机构的调节范围、精度和动态性能进行了实际测量。结果表明: 哈特曼探测器调节机构在俯仰和扭摆方向上的角度调节量均约为±1.2°,调节精度分别为0.43″和2.1″,均满足设计要求,为哈特曼探测器的高精度探测奠定了基础。
哈特曼探测器 调节机构 曲柄滑块机构 直线驱动器 自准直仪 Shack-Hartmann sensor adjustable mechanism slider-crank mechanism line actuator autocollimator 光学 精密工程
2015, 23(10): 2852
1 中国科学院 长春光学精密机械与物理研究所 应用光学国家重点实验室, 吉林 长春 130033
2 中国科学院大学, 北京 100039
为了克服自适应光学系统中倾斜镜的迟滞响应, 提高响应的线性度, 改善倾斜镜的控制精度, 研究了倾斜镜的迟滞非线性效应。提出了一个基于频率相关的Mutified-Prandtl-Ishlinskii (MPI) 模型的补偿方法来在线自适应逆补偿倾斜镜的迟滞非线性。结合反馈PID控制构成了自适应逆前馈复合控制方案, 其中自适应逆前馈克服了由于频率等因素引起的迟滞曲线变化, 反馈PID则改善了整体的控制性能。建立了倾斜镜二阶系统模型来估计倾斜镜系统的输出, 解决了MPI模型参考信号的问题, 避免了增加额外前馈传感器, 保证了光能量的利用率。实验结果表明, 倾斜镜系统15 Hz非线性迟滞率由原来的24.28%降为1.17%, 线性度提高了约95%, 控制精度较传统PID方法提高了约60%。该方法能够有效补偿倾斜镜的迟滞非线性, 提高了自适应光学系统中倾斜镜的校正精度。
自适应光学系统 倾斜镜 自适应逆控制 迟滞非线性 控制精度 adaptive optical system tip/tilt mirror adaptive inverse control hysteresis nonlinearity control accuracy









