Author Affiliations
Abstract
1 Aerospace Laser Technology and Systems Department, Shanghai Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Shanghai 201800, China
2 Center of Materials Science and Optoelectronics Engineering, University of Chinese Academy of Sciences, Beijing 100049, China
3 Shanghai Typhoon Institute, China Meteorological Administration, Shanghai 200030, China
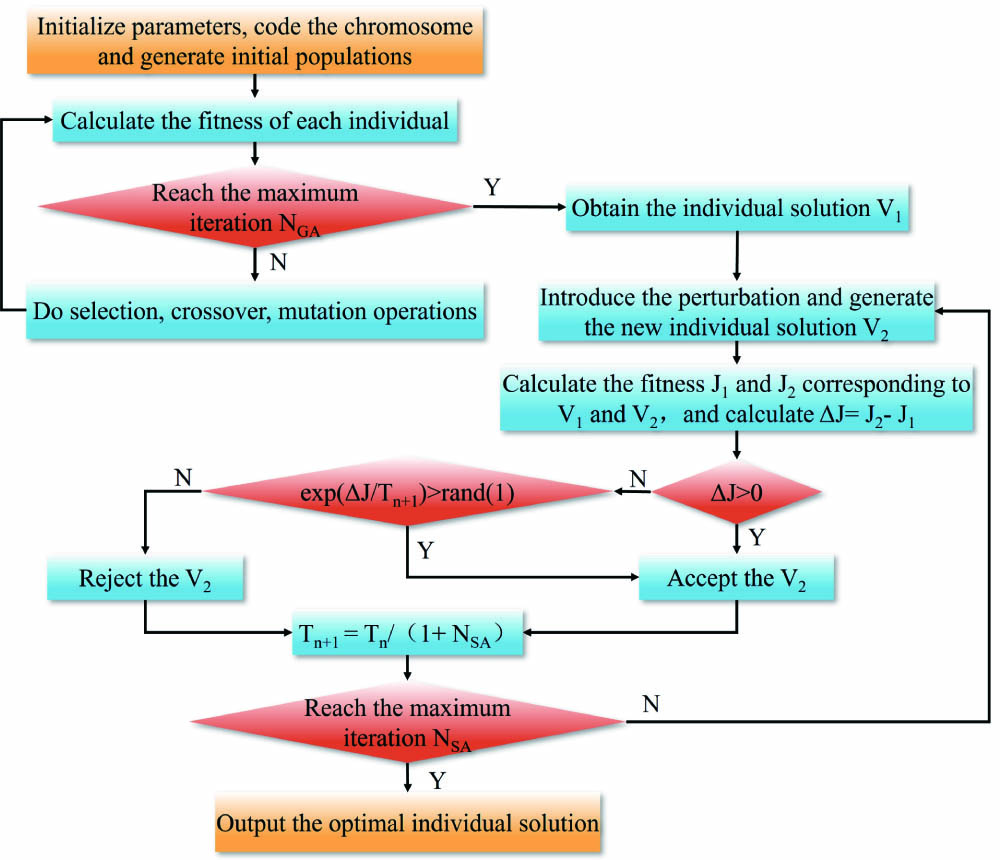
A method of spectrum estimation based on the genetic simulated annealing (GSA) algorithm is proposed, which is applied to retrieve the three-dimensional wind field of typhoon Nangka observed by our research group. Compared to the genetic algorithm (GA), the GSA algorithm not only extends the detection range and guarantees the accuracy of retrieval results but also demonstrates a faster retrieval speed. Experimental results indicate that both the GA and GSA algorithms can enhance the detection range by 35% more than the least squares method. However, the convergence speed of the GSA algorithm is 17 times faster than that of the GA, which is more beneficial for real-time data processing.
coherent Doppler lidar three-dimensional wind field retrieval genetic simulated annealing algorithm spectrum estimation typhoon Chinese Optics Letters
2024, 22(4): 040101
1 北京交通大学 机械与电子控制工程学院, 北京00044
2 北京交通大学 智慧高铁系统前沿科学中心, 北京100044
3 北京特种机械研究所,北京10014
地铁隧道断面轮廓参数测量过程中,需要对高速激光雷达点云进行高精度系统标定。特别是大场景隧道环境,对标定模板要求高,标定过程复杂,检测精度影响大。针对此问题,本论文提出了一种新颖的适用于地铁隧道轮廓点云的标定方法,并基于双激光雷达测量系统,进行了算法研究。本方法设计了专用的手推行便携式标定系统,利用由点云数据提取的标定板线特征,建立目标函数,通过混合了遗传算法和Levenberg-Marquardt算法的非线性优化方法,寻找全局最优解从而实现对激光雷达的标定。实验结果表明:本方法对于两侧钢轨顶轨的标定误差在±1.5 mm以内;静态测量精度X误差在±1 mm内、Y误差在±4 mm内;当采集系统以5 km/h的速度进行数据采集时,动态测量精度X误差在±4 mm内、Y误差在±6 mm内。本方法能够实现激光雷达的高精度标定,算法鲁棒性强,具有易操作、环境适应性强的特点。
激光雷达 地铁隧道 点云标定 共面约束 隧道断面 Lidar metro tunnels point cloud calibration coplanar constraints tunnel section
1 西安建筑科技大学资源工程学院,陕西 西安 710055
2 西安建筑科技大学西安市智慧工业感知、计算与决策重点实验室,陕西 西安 710055
针对露天矿无人矿卡运输作业中路况差、光照强和灰尘大等原因导致小尺寸落石检测困难和实时性差的问题,提出一种使用固态激光雷达检测露天矿非结构化运输道路小尺寸落石的方法。首先使用具有双回波技术的激光雷达进行数据采集,减少灰尘干扰并提取车辆前方可行驶区域;然后采用基于扇面的直线拟合地面分割算法分割地面,实现对有坡度的非结构化粗糙路面的彻底分割;之后引入八叉树的分层网格树模型进行邻域查找,提高邻域查找的速度,引入双色最近对构建图,快速生成聚类簇,引入自适应聚类半径ε,进行聚类并输出小尺寸落石的盒模型。实验结果表明:相较于使用k-d树加速的DBSCAN算法,所提方法的正检率提升9.61个百分点,检测时间缩短379.77 ms。
露天矿 无人驾驶 障碍物检测 激光雷达点云 密度聚类 激光与光电子学进展
2024, 61(8): 0812006
1 昆明理工大学机电工程学院,云南 昆明 650500
2 云南省先进装备智能制造技术重点实验室,云南 昆明 650500
针对移动机器人在进行传统2D环境的定位时所存在的定位精度低且定位实时性差等问题,提出一种改进的迭代近邻点(ICP)算法的定位方法。首先,建立位姿搜索空间,采用由低到高的分辨率对搜索空间进行逐层搜索,并结合多点云密度进行部分点云扫描匹配,排除非最优位姿,加速搜索过程;在进行点云匹配中,采用帧对图的方式,有效地利用了历史帧信息;对得到的最优位姿进行稀疏矩阵位姿优化,进一步提高定位精度。在SLAM Benchmark数据集上进行测试,结果表明所提方法的算法效率是现流行的Cartographer算法的1.8倍到4.9倍之间,同时平移误差较小。并利用Turtlebot2机器人进行实际测试,结果表明所提方法的定位误差相比Cartographer和Gmapping均有明显的降低,且实时性较好;与传统的自适应蒙特卡罗重定位(AMCL)相比,平移误差均值降低了0.035 m,旋转误差均值降低了0.001 rad,具有较高的重定位精度。
激光雷达 移动机器人定位 多分辨率 迭代近邻点 多点云密度 激光与光电子学进展
2024, 61(8): 0811001
1 西北工业大学空天微纳系统教育部重点实验室,陕西 西安 710072
2 宁波永新光学股份有限公司,浙江 宁波 315048
3 西北工业大学宁波研究院,浙江 宁波 315103
为满足车载激光雷达接收光学系统在复杂环境实际应用中的温度适应性要求,本文基于一种将长焦镜头与线阵探测器相结合,通过局部图像级成像显著提高激光雷达系统探测分辨率的方案,设计了一款轻小型无热化的四片式全玻璃长焦镜头,研究了其在不同温度下的像面漂移。分析结果表明,所设计的长焦镜头在整个-40~100 ℃的温度范围内焦移量为0.021 mm,小于焦深0.074 mm,在30 lp/mm处各视场调制传递函数(MTF)均大于0.5,全视场内光斑半径在7 μm以下,水平及垂直角分辨率为0.045°(H)×0.045°(V)。此长焦接收光学系统结构简单、成像质量高、环境适应性强,在车载激光雷达领域具有良好的应用前景。
车载激光雷达 长焦光学系统 光学设计 无热化
1 中国科学院深圳先进技术研究院,广东 深圳 518052
2 奥比中光科技集团股份有限公司,广东 深圳 518055
基于单光子雪崩二极管(SPAD)的激光雷达凭借其灵敏度高、探测距离远、集成度高等优点被广泛应用于三维感知领域。SPAD激光雷达系统中包含各种功能的子模块。研究这些子模块对激光雷达系统性能的影响有助于进一步优化系统方案,提高研发效率,降低研发成本。因此,从系统子模块的特性出发,利用时间相关单光子计数技术(TCSPC)和蒙特卡罗法建立了基于SPAD的激光雷达模型,得到了被动复位电路和主动复位电路、单事件首光子时间数字转换器(TDC)和多事件TDC对系统性能的影响。结果表明:在目标飞行时间为20 ns、环境光为50×103 lx、目标反射率为10%的条件下,主动复位电路与被动复位电路的系统性能基本相当;当目标反射率增加到50%后,主动复位电路的系统性能优于被动复位电路;类似地,多事件TDC的系统性能优于单事件首光子TDC,主要表现在,与单事件首光子TDC相比,多事件TDC的噪声本底计数为均匀分布,其信号计数的峰值更易大于噪声本底计数的峰值,寻峰算法更简单,算力需求更少。仿真结果表明,为使系统性能最优化,SPAD集成芯片的后端子模块应采用主动复位电路和多事件TDC的组合架构。
激光雷达 单光子雪崩二极管 建模与仿真 淬灭电路 时间数字转换器 激光与光电子学进展
2024, 61(10): 1028003
1 重庆交通大学 交通运输学院, 重庆400074
2 同济大学 道路与交通工程教育部重点实验室, 上海01804
针对自动驾驶三维建图中存在的建图不准确以及位姿飘移的问题,利用激光雷达里程计消除惯性测量单元(Inertial Measurement Unit, nIMU)累计误差并通过IMU预积分去除激光雷达点云畸变,形成激光雷达与IMU的紧耦合建图系统;通过增加回环检测因子、激光雷达里程计因子以及IMU预积分因子进行后端图优化,旨在提升定位建图的全局一致性,减小位姿估计误差,降低累计漂移误差。最后,在学校园区实地场景以及利用开源数据集KITTI进行实验验证,实验表明,在选取的学校园区实地场景下,改进算法APE误差均值相较于原算法降低了11.04%,APE均方根误差较于原算法降低了17.35%;改进算法在KITTI数据集场景下平均APE误差下降了10.04%,均方误差方面相较于原算法平均下降了12.04%。研究结果表明,改进的建图方法能够有效提高建图的位姿估计精度与地图构建精度。
激光雷达 自动驾驶 同步定位与建图 传感器融合 lidar automatic driving synchronous positioning and mapping sensor fusion
江苏大学电气信息工程学院,江苏 镇江 212013
激光点云技术可用于苗圃树木生长状态监测与管理,为农业植保机器人提供有效的靶标信息。为了进一步提高树种分类和树冠、树干内部分割的精准性,提出一种基于改进PointNet++的激光点云苗圃树木分类与分割方法。首先,调整PointNet++深度网络邻居点云的相对特征值,同时融合三维点云的低维和高维特征,充分利用各层级点云的特征。然后,将坐标注意力模块与注意力池化融合,进一步增强局部特征提取的能力,提高分类和分割的准确性。最后,针对苗圃常见树木自制了包含7类苗圃景观树木点云的数据集并用于实验。实验结果表明,提出的树种识别方法总体精度可达92.50%,平均类别精度为94.22%;提出的树冠、树干分割方法的平均交并比为89.09%。所提方法在分类和分割性能方面均明显优于经典的PointNet和PointNet++,能够为苗圃树木检测识别和农业机器人作业提供更精确的信息。
遥感 激光雷达 深度学习 树种分类 苗圃树木树冠和树干分割 PointNet++
1 中国科学院长春光学精密机械与物理研究所发光学及应用国家重点实验室,吉林 长春 130033
2 中国科学院大学光电学院,北京 100049
在应用于自动驾驶的相位调制连续波(PhMCW)激光雷达测距系统中,测量中频(IF)信号的脉冲宽度是关键问题,时间数字转换器(TDC)模块对IF信号的测量决定了PhMCW激光雷达的测距范围与精度。然而传统的TDC实现方法测量范围很小,且实现大测量范围时系统复杂度高,难以应用于自动驾驶。为了实现高精度大范围的TDC模块,采用基于现场可编程门阵列(FPGA)的严格计数链法,在保证比较高的测量精度的前提下,增加很少的资源使用量就可以扩大测量范围,设计简单。该TDC模块能够实现1.24 μs的时间测量范围,对应最大探测距离为186 m。利用信号源产生不同脉宽的被测信号进行实际测试,获得了最佳为26.42 ps的测量精度,对应测距精度为3.96 mm,优于现有商用激光雷达50 mm的测距精度。对200 ns脉宽的过采样数据包进行了频谱分析,证明了TDC测试结果受开关电源噪声影响。最后,搭建PhMCW激光雷达系统进行应用验证,实现了0.3~7 m飞行时间探测,从而证明了该TDC测量方法的可行性。该方法在激光雷达测距领域具有广阔的应用前景。
遥感 激光雷达 现场可编程门阵列 时间数字转换器 相位调制连续波 中频信号
1 中国海洋大学信息科学与工程学部海洋技术学院,山东 青岛 266100
2 青岛镭测创芯科技有限公司,山东 青岛 266101
3 崂山实验室,山东 青岛 266237
4 中国海洋大学海洋高等研究院,山东 青岛 266100
阐述了相干差分吸收激光雷达(CDIAL)探测大气二氧化碳(CO2)的原理,设计了1.57 μm波段微脉冲相干探测系统,并对系统的回波信号进行了仿真。通过仿真计算分别探究了温度、压力、波长等因素对差分光学厚度计算及CO2体积分数的反演精度的影响。仿真结果显示:当波长漂移为0.5 pm、温度不确定度为1 K、压强不确定度为1 hPa、水汽体积分数测量不确定度为10%时,这些参数引起的总体误差为0.45%;在大气中CO2的体积分数为4×10-4时,微脉冲相干激光雷达探测CO2体积分数的测量误差约为1.8×10-6。
大气光学 二氧化碳体积分数 相干差分吸收 激光雷达 仿真与性能评估









